- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 사전 준비
1.Install dev & ROS tools
1-1. Install common packages.
1-2. Install packages according to your Ubuntu version.
2. 홈 경로에 ros2_study/src 생성.

3. colcon build 설치.

2. Package 만들기
1. alias 설정
subl ~/.bashrc
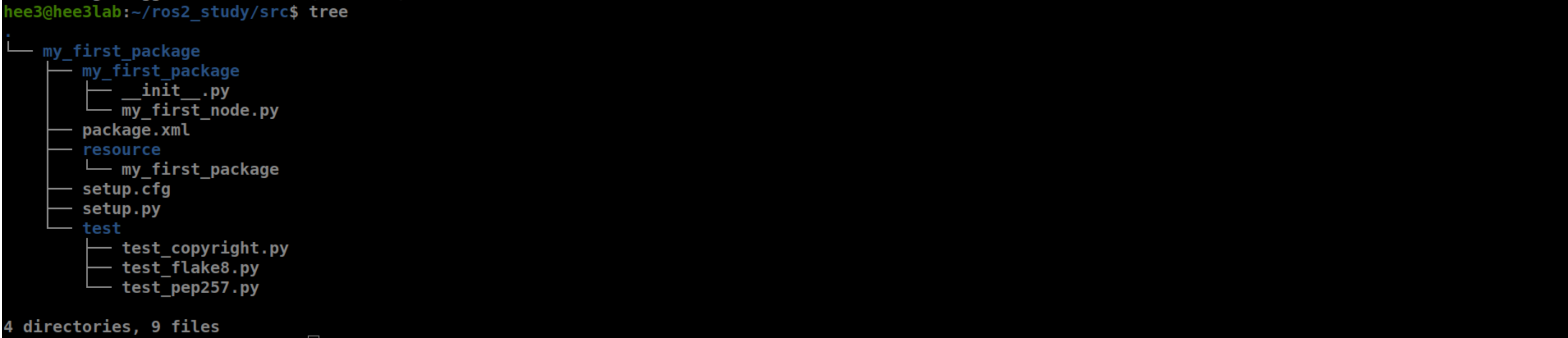
2. 패키지 생성
- 워크스페이스에서 ros2 package 명령어로, 빌드 타입은 ament_python, 노드 이름은 my_first_node, 패키지 이름은 my_first_package으로 생성

3. tree 확인
3. Node 실행
1. 노드 실행

- WS/install에 있어서 실행할 때마다 경로 실행
- 귀찮으니 alias에 추가
2. alias 추가

3. 결과 재확인


3D 모델러의 개발 도전기