- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 토픽 구독
1. my_subscriber.py 추가
import rclpy as rp
from rclpy.node import Node
from turtlesim.msg import Pose
class TurtlesimSubscriber(Node):
def __init__(self):
super().__init__('turtlesim_subscriber')
self.subscription = self.create_subscription(
Pose,
'/turtle1/pose',
self.callback,
10)
self.create_subscription # prevent unused variable warning
def callback(self, msg):
print("X : ", msg.x, ", Y : ", msg.y)
def main():
rp.init()
turtlesim_subscriber = TurtlesimSubscriber()
rp.spin(turtlesim_subscriber)
turtlesim_subscriber.destroy_node()
rp.shutdown()
if __name__ == '__main__':
main()2. setup.py에 추가
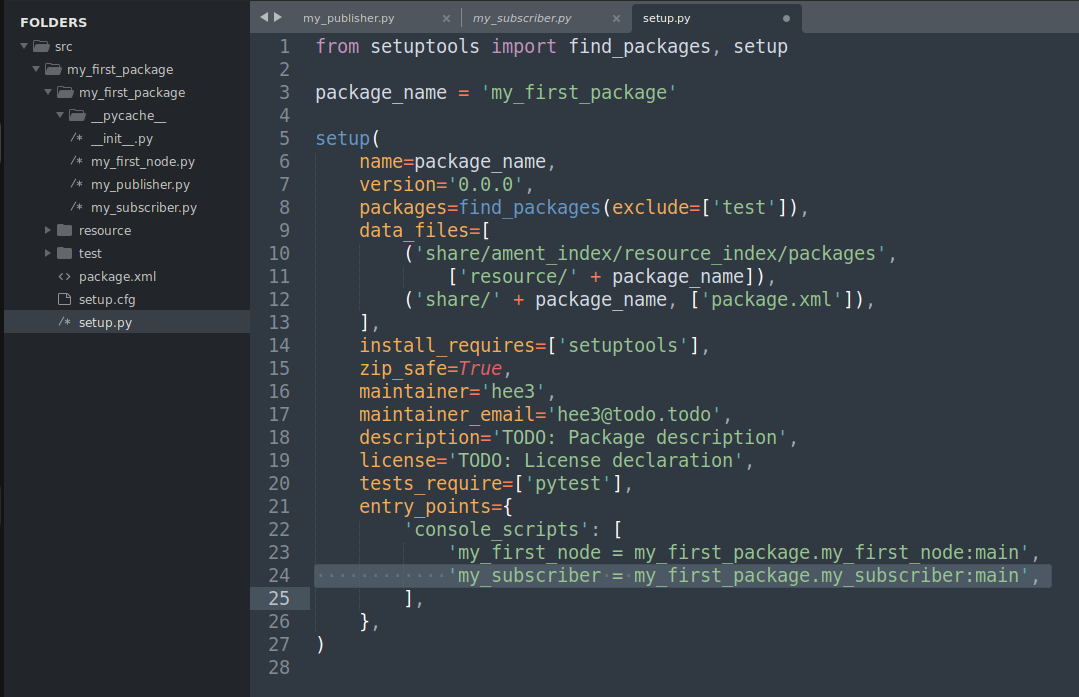
3. turtlesim 실행
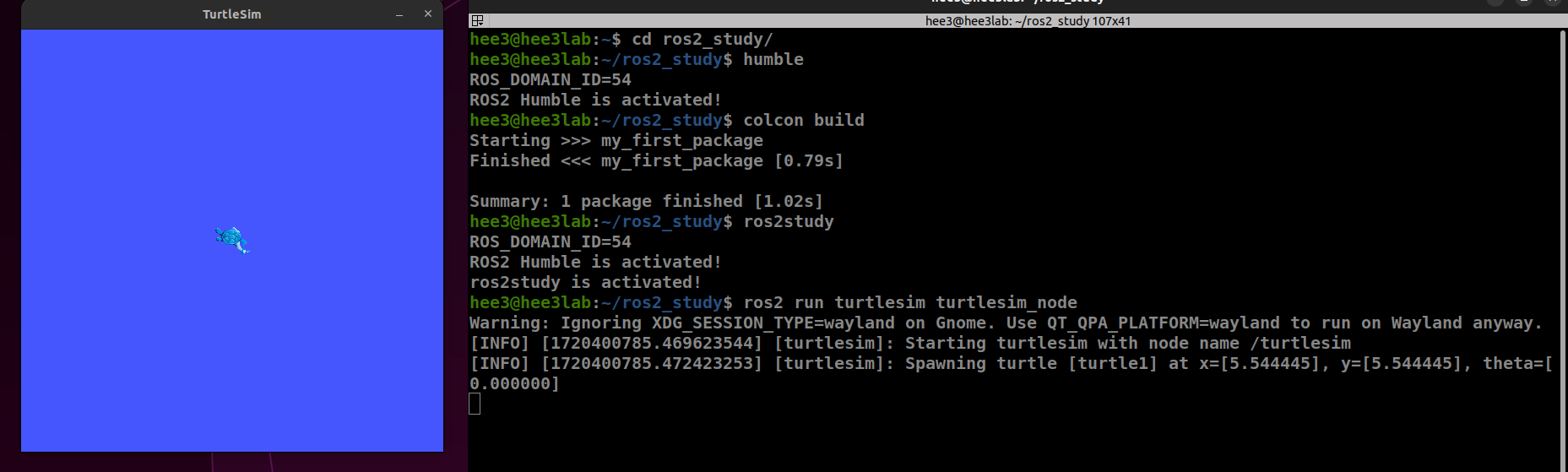
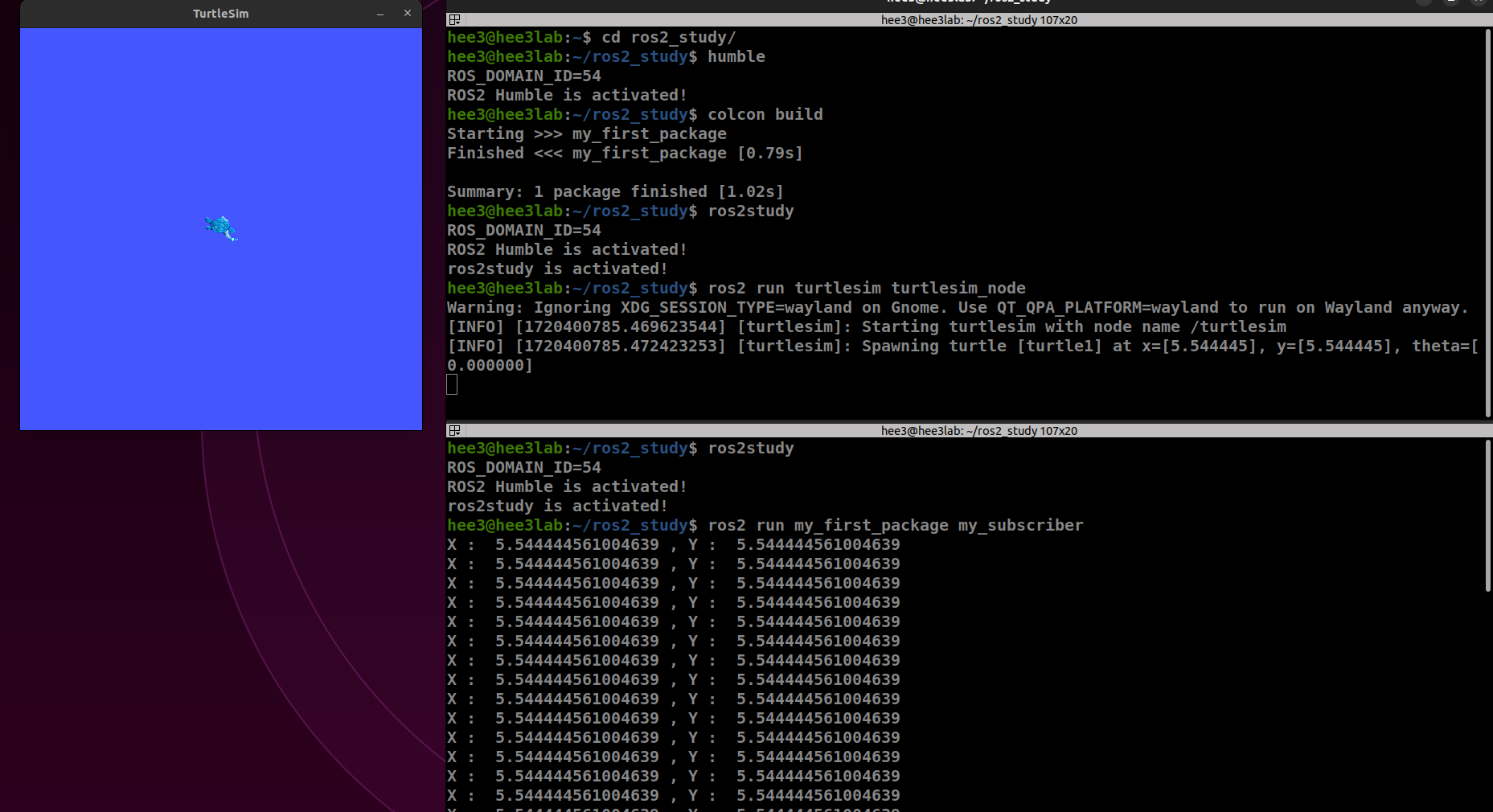
4. 방금 만든 노드 실행
5. rqt_graph 실행
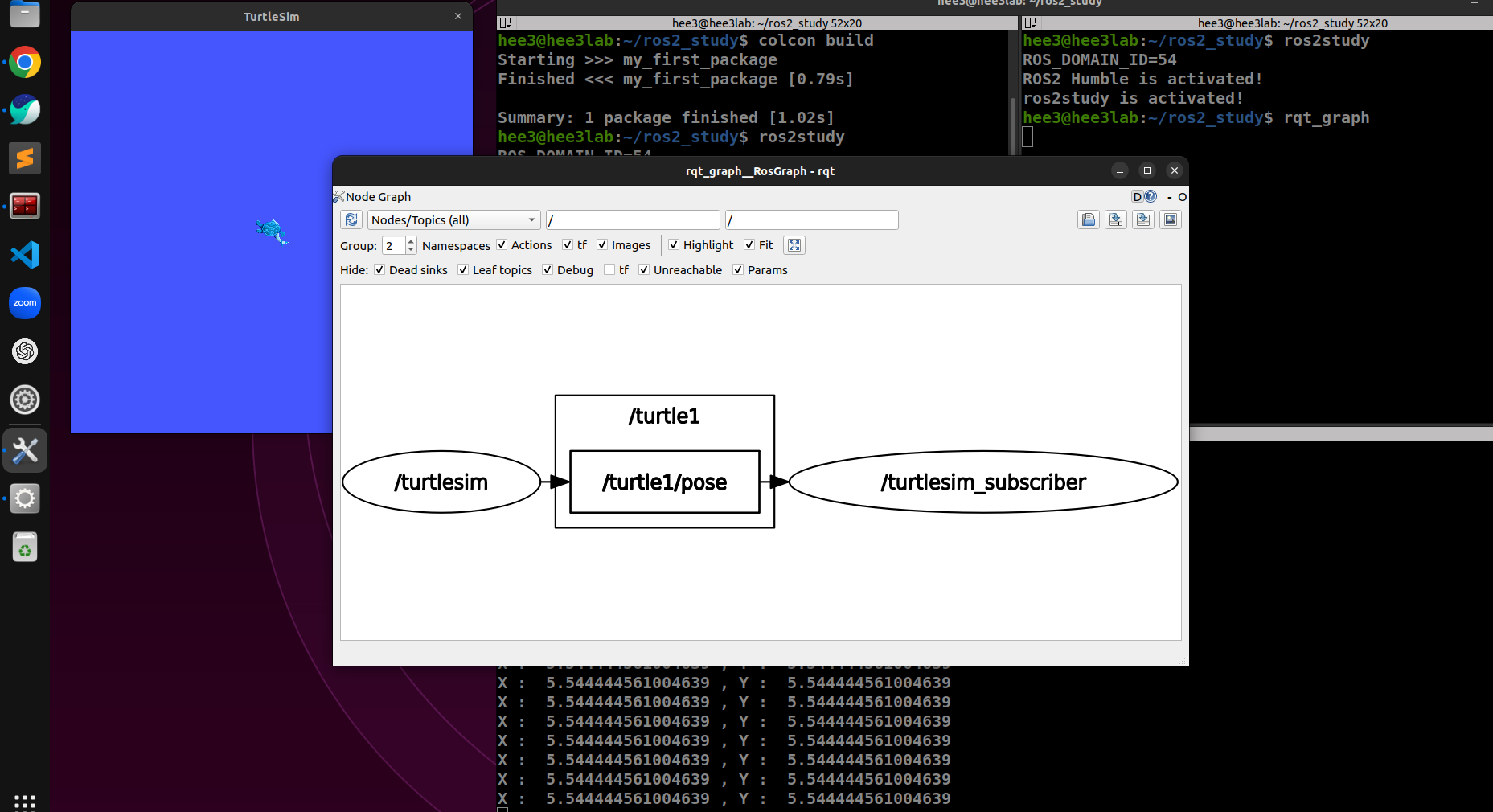
- turtlesim 실행 -> 발행판 pose 토픽을 turtlesim_subscriber에서 구독
코드 추가 → 빌드 → 환경 읽기

3D 모델러의 개발 도전기