자율주행 차량 개요
자율주행 자동차란, 운전자 또는 승객의 개입 없이 자동차 스스로 운행이 가능한 자동차로, 자동차 스스로 사람의 인지-판단-제어 기능을 대체하여 운전할 수 있는 자동차를 말한다.
자율주행 기술 단계
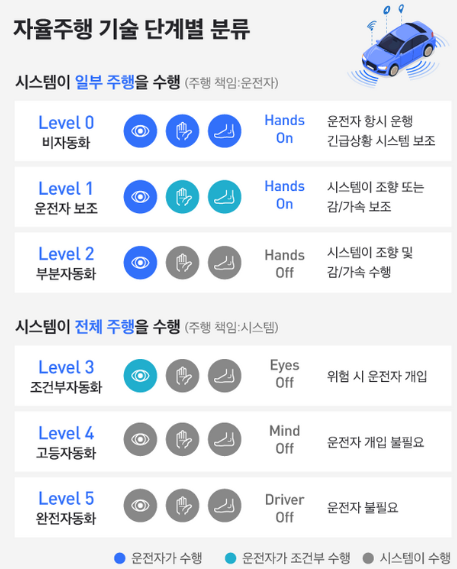
미국자동차공학회 SAE에 따르면 운전자의 개입여부 및 자동화 수준에 따라 6단계로 구분된다. Level 3 이상부터 자율주행이 개입되며 테슬라, 현대 등 현재 3단계 조건부 자동화를 개발 중이다. 현재 자율주행 기술은 2단계 수준이며 인공지능을 중심으로 빠르게 발전 중이다.
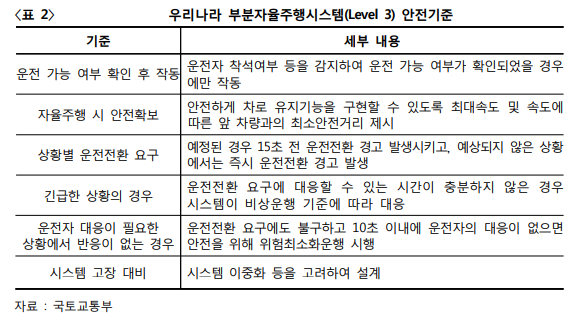
우리나라를 기준으로, Level 3의 안전기준은 위와 같다. 단순히 기술적 요구사항을 충족시키는 것뿐 아니라 특정 조건에서도 탑승자 및 주변 주행자의 안전을 보장해야 하며, 비기능적 요구사항도 충족시켜야 하므로 완전 자율주행을 위해서는 풀어야 할 숙제가 많은 상태이다.
자율주행 구성
자율주행 기술은 인지-판단-제어의 단계로 나눌 수 있다.
1. 인지 :
카메라/레이더/라이다와 같은 센서들을 통해 차량이 주변 환경을 감지하고 이해하는 과정이다. 주행 환경에서 객체 인식 및 추적, 주변 상황 기반 3D 지도 생성 등의 과정이 포함되며 주변 환경을 이해하고 주행에 필요한 데이터를 확보하는 데 필수적이다.
2. 판단 :
인지 단계에서 수집한 데이터를 기반으로 수집된 정보를 분석하고 해석해 주행 경로를 설정한다. 또한 주행 중 발생할 수 있는 잠재적 위험을 평가하고 예측할 수 있다. 이를 기반으로 목적지까지 최적 경로 설정, 교통 상황에 대한 대응 등의 작업을 포함한다.
3. 제어 :
판단 단계에서 결정된 주행 명령을 기반으로 실제로 차량 제어 시스템에 적용해 움직임을 조절한다. 차량의 속도, 방향 등 제어를 조절해 목적지에 도달하거나 주변 환경에 적절히 대응할 수 있다.
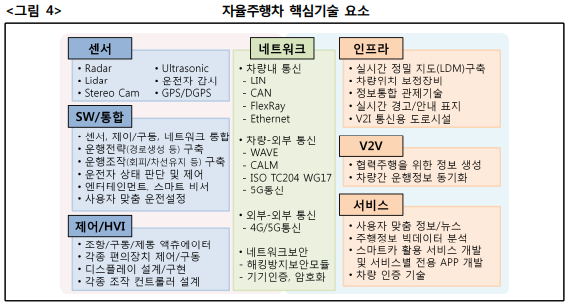
또한 네트워크 측면에서 자율주행은, 차량 내외부 센서 및 교통 인프라/차량/사람 간 통신인 V2X, 차량에서 발생하는 데이터의 실시간 통신을 위한 CAN(Controller Area Network), Ethernet 통신을 비롯하여 네트워크는 차량 내외부에서 발생하는 데이터를 처리하기 위해 중요한 부분이다.
이외에 탑승자 정보제공, 운전 제어권 관리 등 사람-자동차 간 상호작용을 위한 HVI(Human Vehicle Interface) 기술들의 집약체로 자율주행 기술이 구성된다.
자율주행 이슈
자율주행 기술이 발전함에 따라 차량 내외부 네트워크 증가와 함께 보안상 위협과 시스템 오류로 인한 안전 문제가 더욱 대두되고 있다.
- 불법접근, 위장 ECU등으로 보안 위협의 경우, AUTOSAR(AUTomotive Open System Architecture, 차량 전자제어 개방형 표준 소프트웨어 구조 개발을 위한 플랫폼) 보안 규격 강화, 부팅/업데이트 시 허가된 sw인지 확인
- 차량 내부 네트워크 증가로 인한 통신 보안 위협의 경우, 차량 통신 규격인 CAN, Ethernet에 맞춰 모니터링, 사이버 공격 대응 통신 보안기술 개발
- V2X 통신 위험의 경우, 국제 표준을 준용해 통신을 위한 규격 통신보안 표준 제정, ITS 단말 신뢰 기준 제정
위와 같이 자율주행 중 발생하는 안전/보안 기술에 대해 가능한 대처를 정리해볼 수 있다.
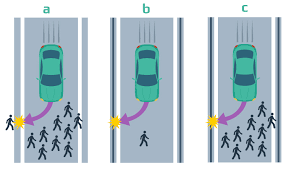
이렇게 긴급한 주행 상황에서 자율주행 자동차의 선택이 윤리적 딜레마를 야기할 수 있는 경우, 인공지능의 운용 방식에 대해서도 사회적 합의가 필요하다. 특히 Level 3까지는 긴급상황에서 사람이 개입하지만 Level 4부터는 운전자의 개입이 불필요하기에 윤리적/사회적/경제적 여러 측면에서 인공지능의 동작에 대한 논의가 필요하다.
ISO 21448/SOTIF(Safety Of The Intended Functionality)
자동차 전기/전자 시스템의 잠재적 기능 오류로 인해 발생하는 사고를 예방하고자 ISO 26262가 발표되었다. 잠재적인 위험을 관리하고 안전성을 보장하기 위해 sw/hw 개발 검증 과정에 도입하여 자동차 제품 생명 주기에 걸쳐 안정성을 보장하기 위한 표준으로 사용된다.
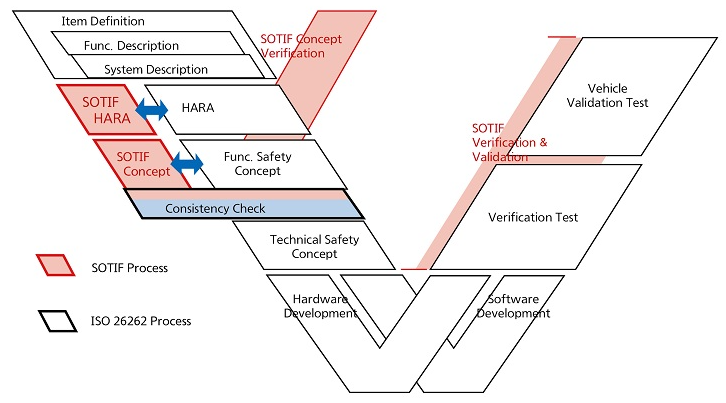
SOTIF 표준은 차량의 sw/hw에 의한 오작동이 없는 경우에도 자율주행 환경에서 불합리한 위험을 방지하기 위해 등장하였다. ISO 26262를 준수하는 sw/hw이 탑재된 차량에서도 센서의 성능 제한, 예상치 못한 도로 상황의 변화, 운전자의 오용 등으로 인해 사고가 발생할 수 있다. SOTIF는 위험한 조건을 사전에 식별하기 위한 프레임워크로, 수용 가능한 수준의 위험이 있을 때까지 동작을 확인 및 검증하는 방법이다. 알려지지 않은 위험한 조건의 영역을 줄이고자 하는데 이것을 위해 충분한 시뮬레이션과 실차 테스트가 필요하다.
이러한 표준 적용을 통해 자율주행 차량 운전자의 안전을 확보할 수 있다.
