
[C++] 함수 중복과 static 멤버
이번 포스팅에서는 함수의 중복과 static 멤버에 대해서 알아볼 것이다. 함수 중복 > 💡 * 함수 중복(function overloading) * C++에서는 C와 다르게 함수를 여러 개를 만들 수 있으며, 이것을 함수 중복(function overloading
[C++] 함수와 참조, 복사 생성자
이번에는 C++의 함수, 참조, 복사 생성자에 대해서 공부를 해보자. 함수의 인자(argument) 전달 인자 전달 방식 고급 프로그래밍 언어에서 인자 전달 방식(argument passing)은 다음과 같다. > * - 값에 의한 호출(call by value) *
[ROS2] ROS2 프로그래밍 설정들
이번 포스팅에서는 RSO2 프로그램이 설정들에 대해서 알아볼 것이다.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24543ROS2 워크스페이스의 설정 스크립트는 setup.bahs와 local_setup.bash 2가지가 있
[ROS2] Launch 프로그래밍
이번 포스팅에서는 ROS2의 Launch 프로그래밍에 대해서 다뤄보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24735ROS2에서 단일 노드를 실행하기 위해서는명령어를 사용한다.하지만 만약, 복수의 노드를 실행시키고 싶
[ROS2] C++ 패키지 설계 및 프로그래밍(파라미터, 실행인자)
이번에는 C++을 기반으로 하는 파라미터 및 실행인자 프로그래밍을 수행해보도록 하겠다.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24858https://cafe.naver.com/openrt/24861파라미터에 대
[ROS2] C++ 패키지 설계 및 프로그래밍(토픽)
이번에는 파이썬과 유사하게 기초 프로그래밍을 응용하여 C++ 패키지를 설계하고, 토픽 프로그래밍을 한번 해보자. 참고한 링크는 다음과 같다. https://cafe.naver.com/openrt/24798 https://cafe.naver.com/openrt/24802
[ROS2] ROS2 프로그래밍 기초 - C++
이번에는 C++ 기반 ROS2 프로그래밍의 기초에 대해서 알아보자. 참고한 링크는 다음과 같다. https://cafe.naver.com/openrt/24451 C++ 기반 ROS2 프로그래밍 기초 패키지 생성
[ROS2] 파이썬 패키지 설계 및 프로그래밍(파라미터, 실행인자)
이번 포스팅에서는 파이썬을 기반으로 하는 ROS2의 파라미터 및 실행인자 프로그래밍에 대해서 공부해보도록 하겠다.참고한 링크 및 이미지 출처는 다음과 같다.https://cafe.naver.com/openrt/24690https://cafe.naver
[C++] string (문자열) 사용
앞선 정리 포스팅에서 언급하였듯, C++에서는 문자열을 사용할 수 있는 방법이 2가지가 있다. cstring string 클래스 cstring은 null 문자(\0)로 끝나는, 전통적인 C언어의 문자열 처리 방식이고, string 클래스는 C++ 표준 라이브러리에서
[ROS2] 파이썬 패키지 설계 및 프로그래밍(토픽)
이번에는 기초 프로그래밍을 응용해서, 토픽 / 서비스 / 액션 프로그래밍을 모두 이용하는 패키지를 설계하고 프로그래밍 해보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24637https://cafe.naver.c
[ROS2] ROS2 프로그래밍 기초 - 파이썬
이번 포스팅에서는 ROS2의 파이썬 프로그래밍 기초에 대해서 알아보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24450그리고 package.xml과 setup.py, setup.cfg 파일을 수정해야 한다.entry_p
[ROS2] ROS2 프로그래밍 기초 - 인터페이스 패키지 만들기
이번 포스팅부터는 ROS2 프로그래밍을 본격적으로 해보자. 우선, 가장 기초가 되는 부분인 인터페이스 패키지 만들기부터 시작을 하겠다.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24629💡 인터페이스 ROS2에서는 데이
[ROS2] ROS2의 패키지 파일
이번 포스팅에서는 ROS2의 패키지 내부의 파일들에 대해서 다뤄보겠다. 참고한 링크는 다음과 같다. https://cafe.naver.com/openrt/24422
[ROS2] 파일 시스템과 빌드 시스템
이번 포스팅에서는 ROS2의 파일 시스템과 빌드 시스템에 관한 이야기를 해보겠다.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24322https://cafe.naver.com/openrt/24411💡 파일 시스템
[ROS2] ROS2의 단위, 좌표, 시간
이번 포스팅에서는 ROS2의 표준 단위(standard unit), 좌표 표현, 시간에 대해서 공부를 해보겠다. 참고한 링크는 다음과 같다. https://cafe.naver.com/openrt/24272 https://cafe.naver.com/openrt/2427
[ROS2] CLI 명령어와 RQt
이번 포스팅에서는 ROS2 CLI(Command Line Interface) 명령어, 그리고 ROS2 개발에 유용하게 사용할 수 있는 개발 도구인 RQt에 대해서 알아보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2419
[ROS2] 파라미터와 인터페이스
이번 포스팅에서는 ROS2의 파라미터(parameter)와, 메시지 통신에 사용되는 인터페이스(interface)에 대해서 다뤄보도록 하자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/24165https://cafe
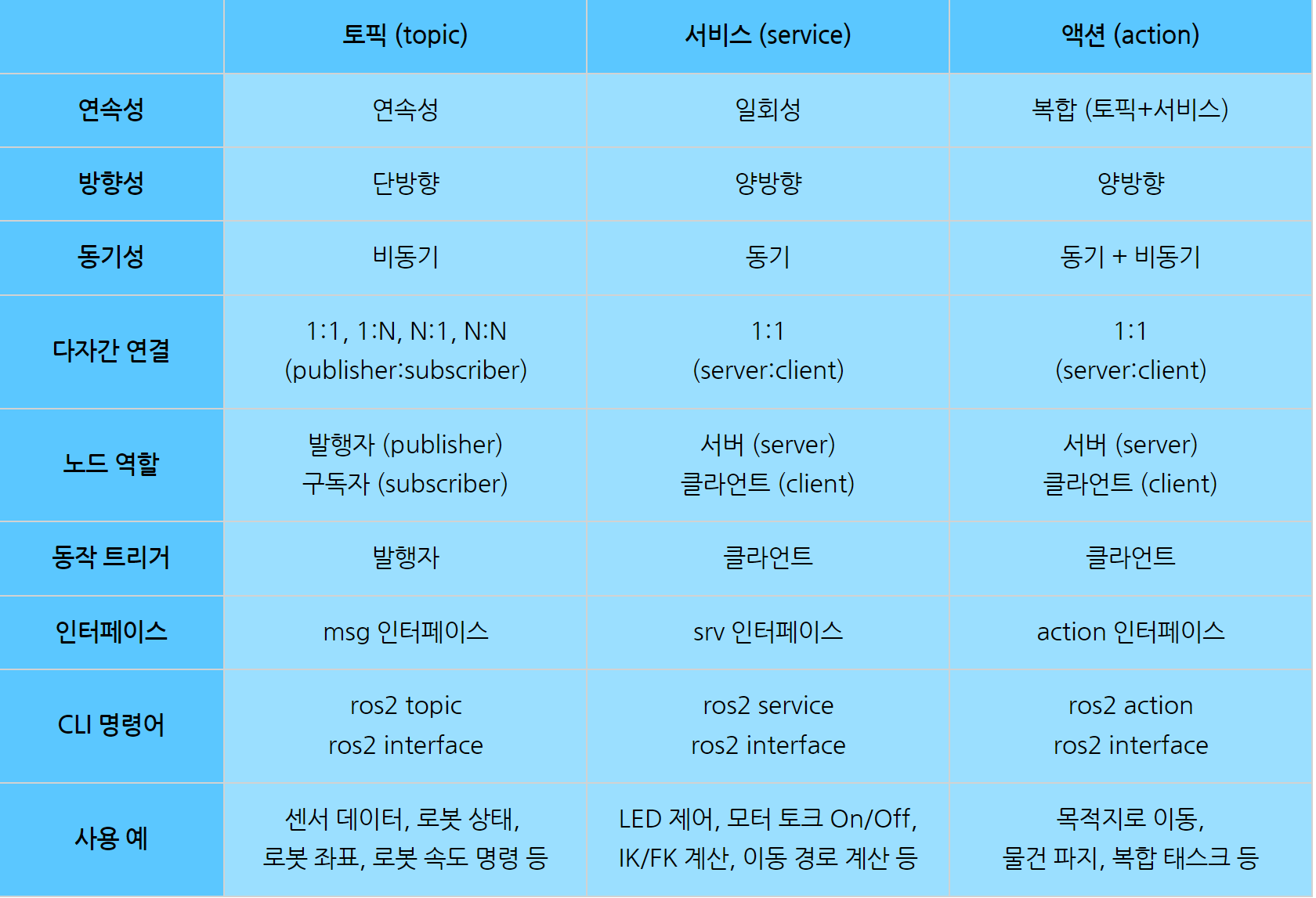
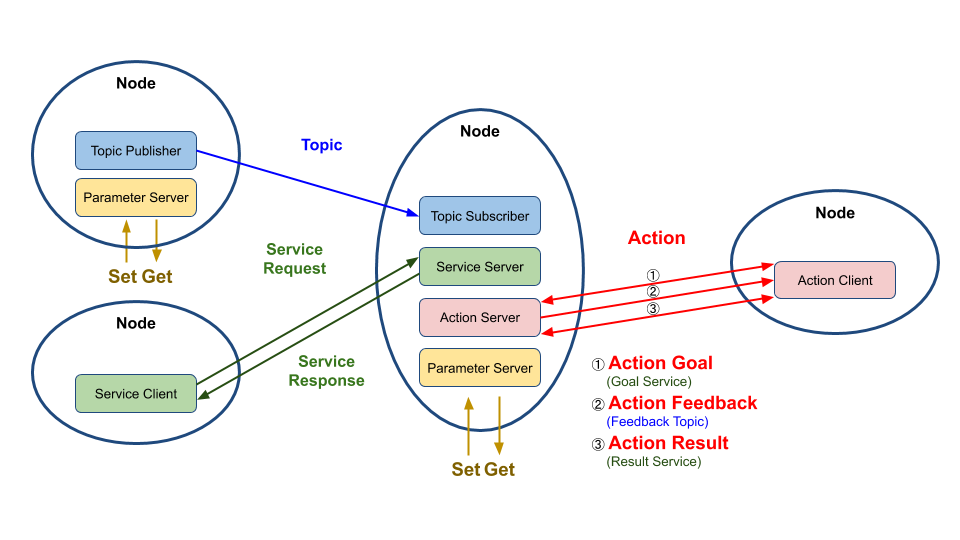
[ROS2] 토픽, 서비스, 액션, bag
이번 포스팅에서는 ROS2의 토픽, 서비스, 액션을 알아보고, 관련한 명령어들을 공부해보도록 하자. 토픽 > 💡 * 토픽 * 출처링크: https://cafe.naver.com/openrt/24101 위 그림처럼, 비동기식 * 단방향 * 메시지 송수신 방식을 토픽
[ROS2] 노드와 데이터 통신
이번 포스팅에서는 ROS2의 노드와, 노드의 데이터 통신 그리고 노드 관련 명령어에 대해서 알아볼 것이다. 노드와 메시지 통신 > 💡 * 노드 * 노드(node)는 최소 단위의 실행 가능한 프로세스를 가리키는 용어로, ROS에서 최소한의 실행 단위로 기능하게 된다.
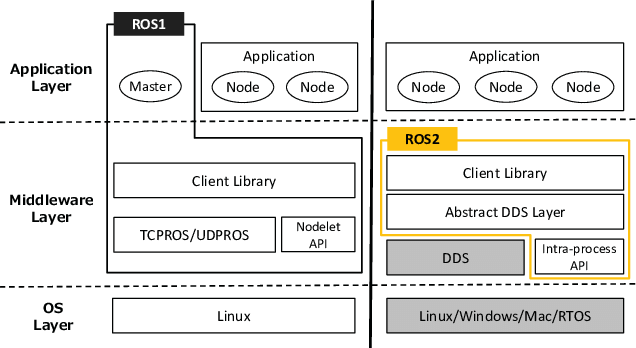
[ROS2] DDS 그리고 QoS
이번 포스팅에서는 ROS1과 ROS2의 가장 큰 차이점이라고 할 수 있는 DDS 그리고 DDS에 따른 QoS를 살펴보도록 하자.ROS1과 마찬가지로, ROS2에서는 메시지 통신인 토픽, 서비스, 액션(ROS1 같은 경우에는 최소 Noetic은 가야된다), 파라미터가 있