Lateral Dynamics 개요
Lateral dynamics란 차량이 좌우로 움직이거나 회전하는 성분을 설명하는 것이다. 단순히 종방향의 전진과 후진만 보는 것이 아니라, 차량이 커브를 돌거나, 슬립하면서 방향이 바뀌는 현상을 해석하는 것이 핵심이다.
자동차가 도로 위에서 안정적으로 선회하고, 조향에 따라 반응하며, 미끄러지지 않고 주행할 수 있도록 만들기 위해 측방 운동에 대한 모델링과 해석은 필수적이다.
Kinematics vs Kinetics
차량의 횡방향(측방향) 운동을 이해하려면 먼저 운동학(Kinematics)과 운동역학(Kinetics)의 차이를 구분해야 한다.
- Kinematics: 운동학은 '힘'이라는 개념 없이 물체가 어떻게 움직이는지를 다루는 학문이다. 즉, 위치, 속도, 가속도 등 운동의 기하학적인 관계를 수학적으로 설명할 수 있지만, 그 운동을 하게 된 힘의 원인은 설명하지 않는다.
(예: "이 차량이 이 각도로 조향하면 어느 반경으로 회전한다.") - Kinetics: 운동역학은 운동학에서 다룬 결과에 힘, 질량, 가속도 등의 개념을 더한다. 뉴턴의 운동 법칙 를 기반으로 하며, 차량이 움직이거나 회전하게 되는 물리적 원인을 함께 다룬다.
(예: "이렇게 돌기 위해서는 이만큼의 횡력이 필요하다.")
차량 횡방향 운동의 주요 변수
Lateral dynamics의 주요 상태 변수는 다음과 같다.
- : 차량의 글로벌 위치 좌표
- : 차량의 yaw 각도, 차량이 바라보는 방향
- : 차량의 슬립각, 즉 차량이 향하는 방향과 실제 진행 방향 사이의 각도
- : 차량 속도 (전방 속도 벡터 기준)
- : 조향각
Steering Modeling
Kinematic Bicycle Model
차량의 조향을 단순화된 기하학적 관계만으로 설명하기 위해 Kinematic Bicycle Model을 사용한다. 차량은 두 개의 바퀴로 구성된 자전거 모델로 단순화하고, 전후륜 모두 조향 가능하다고 가정한다. 그리고 타이어 슬립이나 마찰력은 고려하지 않는다.
또한, 차량은 2차원 평면에서 움직이며 heading angle을 고려한다. 이 모델은 주차 등 저속 주행 시에만 유의미하다.
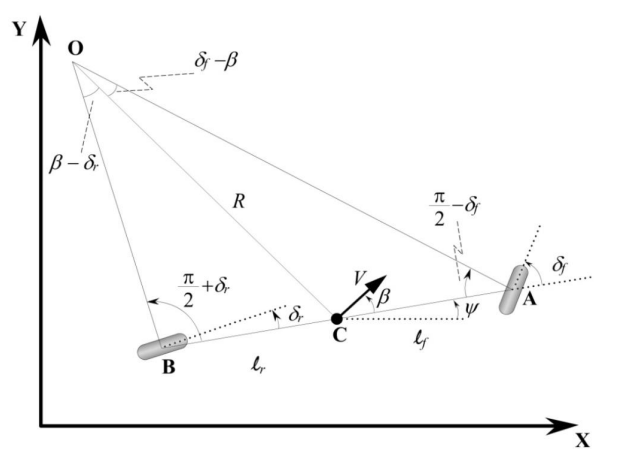
- 차량의 거동은 중심점 와 차량이 바라보는 방향 로 표현할 수 있다.
- 차량 중심의 속도 는 차체의 종방향 축 와 의 각을 가진다. 이때 는 슬립각이다.
- 위의 그래프에서 삼각형 에서는 사인법칙에 의해 가 성립한다.
또한 삼각형 에서는 이 성립한다.
삼각함수 덧셈 정리에 의하면 두 식을 더했을 때 다음이 성립한다.위 식은 다음을 의미한다.- 느린 차속 로 반경 로 선회할 때 요레이트
- 조향각이 크거나 속도가 빠르면 회전 속도가 빨라진다.
- 이 모델은 자율주행차의 저속 궤적 생성 등에 사용되기도 한다.
Ackermann Steering Geometry
차량이 회전할 때, 네 바퀴 모두가 동일한 회전 중심을 공유해야 타이어의 미끄러짐 없이 자연스럽게 선회할 수 있다. Ackerman 조향 구조는 이를 만족시키기 위해 좌우 앞바퀴의 조향을 각각 다르게 설정한다. 차량 선회에 영향을 주는 기본 인자로는 전륜과 후륜 축 사이 거리인 wheelbase 과 좌우 바퀴 사이 거리인 track 가 있다.
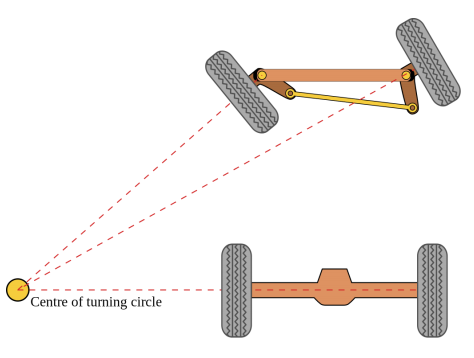
저속 회전 시 이상적인 선회 조건으로 다음이 있다.
- 전륜의 회전 중심은 후륜 차축의 연장선에 놓여있어야 한다.
- 모든 바퀴는 하나의 원점을 중심으로 회전할 수 있다.
- 내륜은 외륜보다 더 많은 조향각이 필요하다.
- 이를 실현하기 위해 조향계는 사다리꼴 형태를 가진다.
Ackermann Angle은 다차량이 선회할 때 내륜()과 외륜() 각도의 평균을 로 표현한다.
좌우 바퀴의 조향각 차이는 평균 조향각의 제곱과 비례한다.
하지만 Ackermann Geometry에는 구현상 한계가 있다.
- 실제 차량은 단일 조향 링크로 연결되어 있기 때문에 완전한 Ackermann 각을 구하기가 어렵다. 그 결과 타이어 슬립이 발생한다.
- 특히 고속주행 시 좌우 바퀴 조향각의 오차로 인해 앞 타이어 마모가 발생한다.
Dynamic Bicycle Model
Kinematic Bicycle Model은 차량이 저속일 때는 유용하지만, 고속 주행 시에는 차량의 타이어 힘, 슬립 현상, 관성 등을 무시할 수 없다. 따라서 고속 코너링 등 실제 도로 상황을 반영하기 위해서는 힘과 모멘트를 모두 고려하는 동역학 모델이 필요하다.
주요 가정과 개념으로 다음의 것들이 있다.
- 차량 운동은 평면 운동이다.
- 차량의 구조는 강체이다.
- 작은 각도는 근사를 사용하여 가 성립한다.
- 차량의 속도 는 일정하다.
- 타이어는 앞뒤 타이어 두 개만 있는 Bicycle model 구조를 따른다.
- 슬립각과 타이어 횡력
- 고속 회전 중 타이어가 향하는 방향과 진행 방향의 각도 차가 생기는데 이것이 슬립각 이다. 전륜 후륜 각각 이다. 가 cornering force인 를 결정한다.
- 슬립각이 존재하면 타이어는 횡 방향의 힘을 생성하게 되며, 이 힘이 차량이 회전할 수 있게 한다. 타이어 횡력 는 전륜과 후륜을 더한 이며, 선형 근사하면 가 된다. 여기에서 는 코너링 강성이다. 하지만 가 매우 작다고 가정하였으므로 이다.
- 참고로, 타이어 횡력이 있어야 커브를 돌 수 있다. 그리고 차량의 yaw 움직임을 설명하기 위해 타이어 횡력을 구해야 한다.
- 차량에 작용하는 힘과 모멘트 평형식
- 측방향 힘 평형식
차량 중심 에 작용하는 모든 횡방향 힘을 모으면 다음과 같이 정리된다.여기서 는 측방향 속도, 는 yaw rate이다. - Yaw 모멘트 평형식 (Z축)
차량 중심을 기준으로 회전하려면 yaw 모멘트가 성립해야 한다. Yaw 모멘트는 차량을 좌우로 회전시키는 힘의 합이다. (부호는 시계방향일 때 마이너스이다)
- 측방향 힘 평형식
- 슬립각을 바탕으로 한 타이어 힘 표현
- 앞바퀴
- 뒷바퀴
- 앞바퀴
- 차량의 상태를 나타내는 상태 공간 표현위의 식에서 는 일반적으로 운전자의 입력 (wheel)과 같다.
최종 선형화된 상태공간 모델은 다음과 같다. - 모델 확장: 경사로 및 비선형 타이어
- 노면이 기울어진 경사로 bank가 있는 경우 측방향 힘은 다음 함을 포함하게 된다.이는 yaw 동역학에는 영향을 미치지 않는다.
- 노면이 기울어진 경사로 bank가 있는 경우 측방향 힘은 다음 함을 포함하게 된다.
- 큰 슬립각에서의 타이어 모델
- 슬립각이 커질 경우 앞서 살펴본 선형 타이어 모델은 부정확하다.
- 실제 타이어의 거동은 비선형적이므로 Magic Formula, Brush, Dugoff 같은 모델을 고려해야 한다.
좌표게 변환과 가속도 해석
차량의 움직임을 해석할 때는 inertial frame과 rotating 좌표계를 사용한다.
- Inertial Frame (세계 좌표계): 고정된 기준 좌표
- Rotating Frame (차체 좌표계): 차량에 붙어서 함께 회전하는 좌표계
실제 차량 운동은 회전하는 차체 좌표계 기준에서 상대속도와 가속도를 구하고, 이를 다시 세계 기준으로 변환하는 방식으로 진행된다.
- 극좌표계 (Polar Coordinate)
- 의 위치 벡터
- 단위 벡터 의 변화율
- 회전하는 좌표계에서는 단위 벡터도 시간에 따라 변한다.
- 속도와 가속도
- 여기에서 는 원심 가속도, 는 코리올리 가속도이다.
- 회전 좌표계에서의 가속도 변환
차량 중심 의 운동을 회전하는 차량 좌표계에서 측정한 후, 세계 좌표계 기준으로 변환하는 것이 목표이다.- 는 차체의 각속도이다.
- 해석하면 정지된 좌표계에서 가속도는 회전 좌표계의 가속도에 원심 가속도, 오일러 가속도, 코리올리 가속도를 더한 것과 같다.
- 차량 운동 해석에 적용차량이 회전하면서 전진하고 있는 상황에서 가속도를 나누어 해석할 수 있다. 측방향 가속도는 다음과 같이 표현된다.측방방향 속도 변화율과 구심 가속도를 더한 것과 같다.
Steady-State Cornering Analysis
앞서 일반적으로 코너링 할 때 가속도를 좌표계별로 해석하였다.
차량이 일정한 반경을 따라 속력을 유지하면서 회전하는 것을 Steady-State Cornering이라고 한다. 이 경우 시간에 따라 가속도나 속도, 조향각이 변하지 않는 정상 상태가 되어 동역학 해석이 훨씬 간단해지고, 차량의 조향 특성을 분석할 수 있다.
정지 상태의 의미는 다음과 같다.
- 측방 속도와 조향각(yaw rate)의 변화율이 0이다.
- 선회의 중심 ICR은 두 바퀴의 속도 벡터 수직선의 교점으로 구할 수 있다.
Steady-State Cornering 해석
- 조향각과 속도의 관계
차량이 일정한 반경 을 두고 회전할 때 조향각 는 다음과 같이 표현된다.이는 정상 상태에서 을 유지하기 위한 조향각으로 해석할 수 있다. - 힘과 모멘트 평형
- 측방향 힘은 로 표현할 수 있고, 는 다음과 같다.
- 요우 모멘트 평형은 다음과 같다.
- 이 두가지 조건을 바탕으로 전후륜 힘을 계산하면 다음과 같다.
- 측방향 힘은 로 표현할 수 있고, 는 다음과 같다.
- 언터스티어 계수
차량의 질량이 이고 코너링 강성 가 있을 때 언터스티어 계수는 다음과 같다.언더스티어 계수는 차량이 속도에 따라 조향 반응이 얼마나 변하는지 나타낸다. 이면 언더스티어, 이면 오버스티어이다. - 선회 반경과 조향
조향각 와 선회 반경 은 반비례 관계에 있다. 즉, 조향각이 커질수록 더 작은 원으로 돌게 된다.
조향 특성 분류
차량의 조향 특성은 크게 세 가지로 분류된다.
- Understeer: 이며, 속도가 빨라질수록 더 많이 조향해야 원 반경을 유지할 수 있다. 대부분의 차량은 언더스티어 특성을 나타내도록 설계된다. 현시대 자동차는 다양한 형태의 언더스티어로 설계된다.
- Neutral steer: 속도에 관계없이 조향각이 일정하다. 여러 변수 중 작은 변화가 생기면 오버스티어가 될 수 있기 때문에 바람직하지 않다.
- Oversteer: 이며, 속도가 빨라질수록 조향각을 줄여야 한다. 오버스티어 특성을 나타내도록 설계되는 차량은 없다.
- 특성 속도 Characteristic Speed
- 언더스티어 차량에서 조향각을 Ackermann 각의 두 배로 해야할 때의 속도가 characteristic speed이다. 이 속도 이상에서는 조향각이 더 빠르게 증가하며, 차량의 언더스티어 경향이 더욱 강해진다.
- 속도가 빨라질 때 일 때 을 유지하기 위해서 조향각 를 더 키워야 한다.
- Critical Speed
- 오버스티어 차량에서 조향각이 0이 되는 속도를 critical speed라고 한다. 이 속도 이상에서는 차량이 자체적으로 회전하려는 경향을 보여 제어가 어려워지고, 스핀 위험이 있다.
- 오버스티어 차량에서 조향각이 0이 되는 속도를 critical speed라고 한다. 이 속도 이상에서는 차량이 자체적으로 회전하려는 경향을 보여 제어가 어려워지고, 스핀 위험이 있다.
Sideslip Angle 해석
슬립각 란 차량이 바라보는 방향 yaw와 실제 진행 방향 간의 차이이다. 차량 중심에서 뒷차축까지 거리를 , 회전 반경을 이라 할 때 는 다음과 같다.
저속 주행 시 후륜이 바라보는 방향과 실제 진행 방향 간의 차이 은 0이다. 따라서 저속주행 시 슬립각 는 0보다 크므로 뒷바퀴가 안쪽을 따라 움직이며, 고속주행 시에는 0보다 작아서 불안정할 수 있다.
주행 성능 지표 및 조향 튜닝
성능 지표
조향을 하면 차량은 회전하면서 횡가속을 발생시킨다. 이때 조향 입력 대비 차량이 얼마나 민감하게 반응하는지 나타내는 것이 lateral acceleration gain이다.
- 언더스티어 차량에서 속도가 증가하면 게인은 일정한 값으로 수렴한다.
- 뉴트럴 스티어 차량에서는 속도 제곱에 비례하여 게인이 증가한다.
- 오버스티어 차량에서는 속도가 증가할수록 게인이 폭발적으로 커켜 차량이 불안정해진다.
조향은 차량의 회전 (yaw)를 유도한다. 이때 조향에 비례하여 차량이 얼마나 빠르게 방향을 바꾸는지 측정하는 지표가 yaw rate gain이다.
- 언더스티어 차량에서는 characteristic speed에서 최대값에 도달 후 감소한다.
- 뉴트럴 스티어 차량에서는 일정하게 증가한다.
- 오버스티어 차량 속도 증가 시 불안정해진다.
Steady-State 조향 Tuning
- 하중 반영한 코너링 강성 변화
타이어의 횡방향 강성은 가해지는 수직 하중이 증가할수록 더 커진다. 이로 인해 앞/뒤 타이어의 슬립각 차이가 변하며 조향 특성에 영향을 미친다. - 중립조향 조건 유도
수직하중과 타이어 강성이 선형적이라고 가정하면 차량의 질량 주임 위치에 무관하게 항상 앞/뒤 슬립각이 같을 수 있다. - 마찰력 분배와 비선형 효과
현실의 타이어는 비선형 거동을 보이기 때문에 하중이 많아질수록 마찰계수가 변한다. 결과적으로 앞 타이어가 더 많이 미끄러져 언더스티어의 경향을 띠게 된다.
모델 적용 및 비교
좌표계 변환
차량의 주행 경로를 글로벌 좌표계로 나타내기 위해 변환이 필요하다.
이 수식들을 통해 차량이 도로 중심선에서 얼마나 벗어났는지(), 방향 오차가 얼마인지()를 계산할 수 있다.
Bicycle vs Full Nonlinear Model
| 항목 | Bicycle Model | Full Vehicle Model |
|---|---|---|
| 구성 요소 | 타이어 2개 | 실제 타이어 4개 |
| 정확도 | 저속에서 정밀 | 고속에서 부정확 |
| 계산량 | 낮음 | 높음 |
| 슬립각/요우레이트 | 대체로 일치 | 고속에서 차이가 큼 |
경로 추종 등 간단한 제어에서 Bicycle Model을, 고속 안정성 제어 시 Full Nonlinear Model을 적용한다.
- 시뮬레이션 비교 결과
- 40 km/h 주행 시 두 모델 모두 유사한 결과를 보인다.
- 80 km/h 주행 시 Full model은 더 큰 슬립각, 더 빠른 yaw rate가 필요하다. 고속에서는 단순한 Bicycle Model의 한계가 명확히 드러난다.
