CNN 가즈아~!
CNN(Convolutional Neural Network)
🧐 이미지 데이터
✍ 이미지 데이터?
- 이미지 데이터는 사진 또는 그림 등의 이미지를 컴퓨터에 저장한 데이터를 의미
*.jpg,*.png등의 확장자를 가진 파일- Pixel(
Pictures Elements) 로 이루어진 2차원 데이터 - 각 Pixel은 색상이나 밝기 정보를 가짐
- 색상은 RGB 3채널로 표현되며 각 채널은 8비트의 수로 이루어짐
- 흑백 이미지의 경우 Pixel은 밝기 정보만 가지고 있으며 255: 흰색, 0: 검은색
✍ 딥러닝을 활용한 이미지 처리 사례
- 사물 인식(Object Detection) ex> 자율 주행, 안면 인식 등
- 이미지 캡셔닝(Image Captioning)
- 이미지 합성 ex> 딥페이크
- 화질 개선 ex> super resolution, NVIDIA DLSS
- etc,.
✍ 이미지 처리 기법(except 딥러닝)
-
형태 변환
ex> crop(잘라내기) / rotate(회전) / resize(사이즈 재정의) / shearing(전단 변환) / rescale(비율 변환) -
색상 변환
ex> brightness(밝기 조절) / contrast(대조 변환) / grayscale(흑백 변환) -
필터
ex> sharpening / blur / edge-detection -
Python의 경우
Pillow혹은OpenCV로 이미지 전처리 가능
🧐 CNN (Convolutional Neural Network)
✍ CNN 등장 배경
- 초기 모델인 Perceptron 의 경우 Fully Connected Layer(FC Layer)로 구성
- FC Layer => 1차원 데이터 처리
- 이미지 데이터(2차원)를 1차원으로 바꾸면 공간 정보가 소실됨
- 2차원 데이터를 그대로 유지하면서 학습할 수 있는 CNN 등장
✍ CNN 구성 요소
- Convolutional Layer ⭐⭐
- Pooling Layer
- Classifier (FC Layer)
1. Convolutional Layer ⭐⭐
Convolution 연산
2차원의 5 X 5 이미지 데이터와 3 X 3 커널(필터)이 있다고 할 때
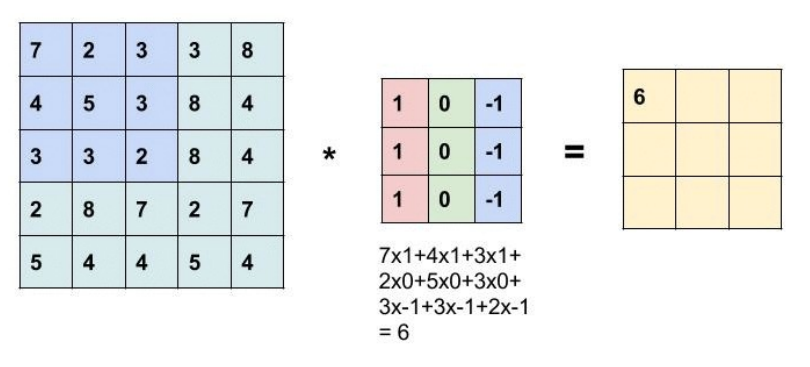
아래와 같은 연산이 진행됨
# stride: 1
result[0][0] =
image[0][0] * kernel[0][0] +
image[0][1] * kernel[0][1] +
image[0][2] * kernel[0][2] +
image[1][0] * kernel[1][0] +
... +
image[2][2] * kernel[2][2]
result[0][1] =
image[0][1] * kernel[0][0] +
image[0][2] * kernel[0][1] +
image[0][3] * kernel[0][2] +
... +
image[2][3] * kernel[2][2]
...이런 연산 방식을 convolution 연산이라고 하며
이미지 데이터와 커널의 convolution 연산을 통해 나온 결과 => feature map
- RGB 채널에 연산을 수행할 경우 각 채널별로 convolution 연산을 수행한 후 결과를 더해서 하나의 feature map 생성
- 커널(필터)이 n개인 경우 feature map도 n개 생성
- 커널 => 학습 가능 => 커널의 각 값들이 가중치가 됨
Convolutional Layer
-
학습 가능한 커널들로 이루어진 Layer
-
layer와 layer 내부 커널을 통해 이미지의 특정 feature를 추출할 수 있음
-> 특정 feature를 추출하도록 커널 학습 가능 -
Hyperparameter
-stride: 커널의 이동 폭
-padding: 이미지의 padding
(convolution 연산 수행시 feature map 크기가 줄어듦을 방지) -
하나의 커널이 픽셀 간 정보를 보며, 이미지 전체 영역을 학습하기 때문에 이미지 특징을 잘 뽑아낼 수 있음
-
커널이 가진 parameter를 이미지의 모든 영역에서 공유하기 때문에
FC Layer에 비해 parameter 수가 현저히 적으며 과적합 방지에 유리함 -
Convolution 또한 선형 연산이기 때문에 비선형성을 추가하기 위해 활성화 함수(주로
ReLU) 를 사용
2. Pooling Layer
-
역할 : Feature Map 사이즈를 줄여서 Parameter 개수를 줄이는 것 -> 과적합 조절
-
이미지나 Feature Map을 겹치지 않는 영역으로 분할한 후
각 영역의 최대값 / 평균값 을 계산하여 새로운 Feature Map을 구성
( MaxPooling / Average Pooling) -
일반적으로 Max Pooling 을 사용
-
Feature Map의 채널이 여러 개인 경우 각 채널 별로 Pooling 연산 수행
-
Global Average Pooling / Global Max Pooling
: 전체 Feature Map에서 하나의 평균값 / 최대값 을 계산
=> 여기선 Global Average Pooling을 많이 사용
3. Classifier (분류기)
- 역할 : 이미지를 분류 하기 위해 Feature Map을 1차원으로 변환하여 FC Layer에 통과 시켜 분류를 수행
✍ CNN 모델 구성
- convolutional Layer와 pooling layer는 짝꿍!
- conv + pool 로 feature map을 뽑아낸 후 Dense(fc layer) 로 이미지 분류
Input Layer - (Convolutional Layer - ... - Pooling Layer) (repeat) - Dense Layer - ... - Output Layer
✍ 대표적인 CNN 모델
-
LeNet(1990) => 우편번호 인식을 위한 모델
-
AlexNet(2012) => imageNet challenge 우승 -> 기존 모델 성능을 큰 폭으로 상회
=> 딥러닝 모델 학습에 GPU를 활용 -
VGGNet(2014) => 커널 사이즈를 모두 3 x 3으로 통일
parameter 수 증가를 억제하면서 모델 층을 더 많이 쌓을 수 있게 됨
(층이 많을수록 성능이 향상됨) -
ResNet(2015) => layer 개수를 최대 152개로 늘림
=> 이전 모델의 문제 : layer 개수가 많아지면 역전파시 vanishing gradient(기울기 소실) 문제 발생
=> residual connection 으로 해결
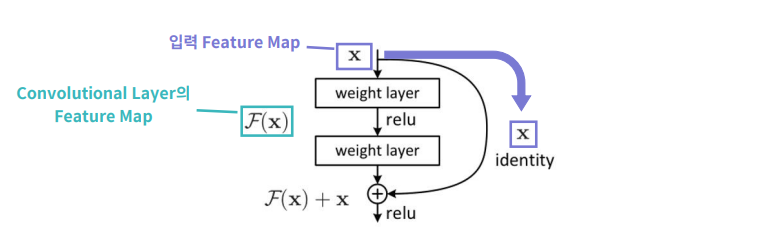
🤷♀️ Residual Connection ?
convolutional layer을 우회하는 연결
=> 입력 feature map이 우회로를 통과하여 convolutional layer의 feature map과 더해짐
=> 기울기가 항상 1 이상이 되어 기울기 소실 문제 해결
- 이미지 분류 작업 외
-> YOLO / R-CNN (객체인식) , U-Net (이미지 분할) 등
출처: 엘리스 학습 자료 및 강의
