모터 드라이버 2륜
회로
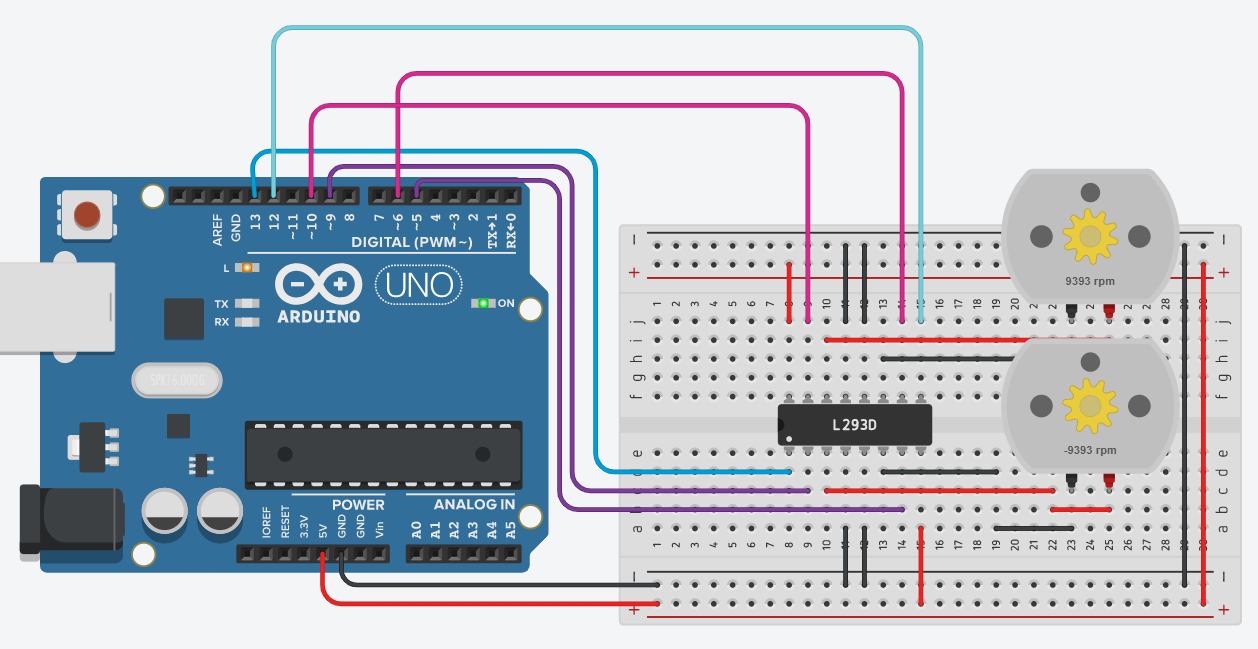
https://www.tinkercad.com/things/eaD1QqKPqRy-2/editel
소스 코드
void setup(){
//motor 1
pinMode(13, OUTPUT);
pinMode(9, OUTPUT);
pinMode(5, OUTPUT);
digitalWrite(13, HIGH);
//motor 2
pinMode(12, OUTPUT);
pinMode(10, OUTPUT);
pinMode(6, OUTPUT);
digitalWrite(12, HIGH);
}
void loop(){
//motor 1
digitalWrite(9, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, HIGH);
digitalWrite(10, LOW);
delay(3000);
//motor 2
digitalWrite(9, LOW);
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(10, HIGH);
delay(3000);
//motor 3 - 같으면 안 돌아간다(0rpm)
digitalWrite(9, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(10, LOW);
delay(3000);
}모터 드라이버 - 속도 조절
회로
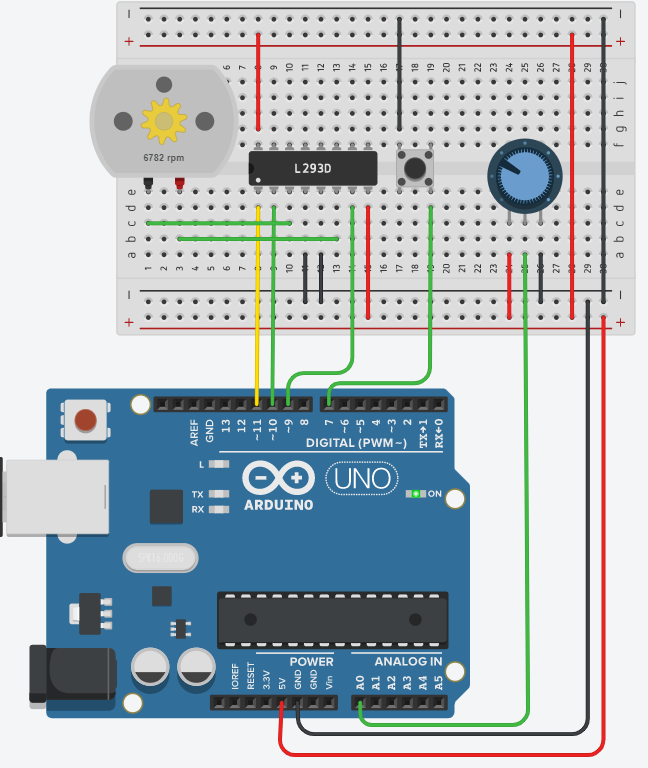
https://www.tinkercad.com/things/j6PERX5XiY4-/editel
소스코드
int enablePin = 11;
int in1Pin = 10;
int in2Pin = 9;
int switchPin = 7;
int potPin = 0;
void setup()
{
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(enablePin, OUTPUT);
pinMode(switchPin, INPUT_PULLUP);
}
void loop()
{
int speed = analogRead(potPin) / 4;
boolean reverse = digitalRead(switchPin);
setMotor(speed, reverse);
}
void setMotor(int speed, boolean reverse)
{
analogWrite(enablePin, speed);
digitalWrite(in1Pin, ! reverse);
digitalWrite(in2Pin, reverse);
}- 속도 조절하려면 DC모터보다는 스텝모터를 추천함 왜냐하면 DC모터 같은 경우에는 생으로 전압을 조절해야돼서
결과
저항이 클수록 느리게 돌아간다
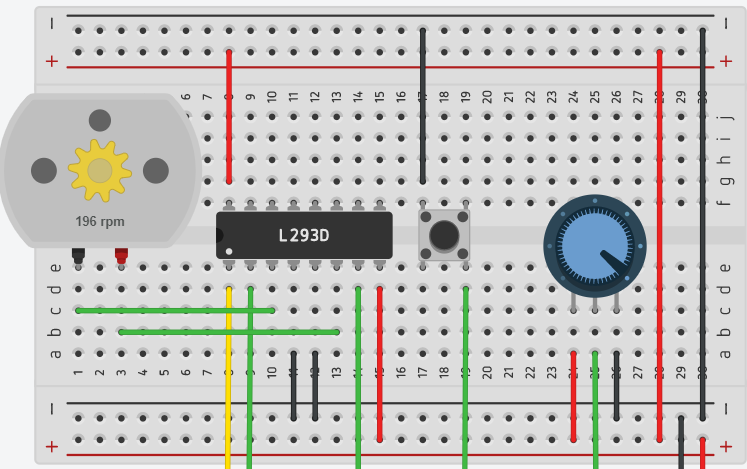
저항이 작을수록 빠르게 돌아간다

