칼만 필터는 루돌프 E. 칼만 (Rudolf E. Kalman) 이라는 수학자/전산학자가 1960년에 제안한 알고리즘임
목차
1. 칼만 필터 개념
“예측 + 관측 = 더 정확한 추정”을 하는 알고리즘
🚌 예시: 눈 감고 버스 타기
- 눈을 감고 있어서 정확한 위치는 모름
- 속도계: "지금 시속 30km!"
- GPS: "여기쯤이야!" (근데 좀 엉터리)
-> 칼만 필터는:
1. 속도로 예측
2. GPS를 참고해서 보정
3. 더 정확한 위치 추정
이 과정을 계속 반복하면, 진짜 위치에 점점 가까워짐
2. 칼만 필터 작동 원리와 수식
1단계: 예측 (Prediction)
-
상태 예측

이전 상태에서 시스템이 어떻게 바뀌는지 반영해서 다음 상태를 예측하는 식
ex. 속도가 10이고 1초가 지났으니까, 위치는 10만큼 이동했을거야 -
오차 공분산 예측

예측된 상태의 불확실성(P)도 같이 예측, 시스템 모델 자체가 부정확 할 수 있으니까 잡음(Q)도 더해줌
2단계: 업데이트 (Update)
-
칼만 이득 계산
예측값과 관측값 중 누굴 더 믿을지 결정하는 비율
예측이 정확하면 K는 작고, 관측값을 많이 믿음
관측이 정확하면 K는 커지고, 예측을 더 무시함 -
상태 보정

예측값에다가 오차(측정값-예측값)을 더해줌
얼마나 더할지는 K가 결정 -
오차 공분산 예측

업데이트 후의 불확실성도 갱신, 보정을 잘 했으니까 오차 범위도 줄여줌
과정을 요약하면
예측 : 이쯤있겠지
관측 : 센서는 여기라고 말해
보정 : 둘 사이의 차이를 반영해서 더 정확하게
내가 계산한 값(예측) + 센서가 알려주는 값(관측) = 둘을 잘 섞어서 더 믿을 만한 결과를 만드는 알고리즘
3. 칼만 필터 적용 사례
| 분야 | 적용 예시 |
|---|---|
| 자율주행차 | GPS + IMU 융합, 차 위치 추적 |
| 로봇 | 로봇의 위치와 속도 추정 |
| 스마트폰 | 센서 융합으로 방향, 위치 추정 |
| 항공우주 | 항공기의 고도/속도/위치 추적 |
| 금융 | 주가 예측, 시계열 필터링 |
| 게임/AR | 카메라, 센서 위치 안정화 |
4. 칼만 필터 예제 코드 (1D 위치 추정)
import numpy as np
import matplotlib.pyplot as plt
# 초기 상태
x = 0
P = 1
Q = 0.01
R = 1
# 시뮬레이션 데이터
np.random.seed(0)
true_positions = np.linspace(0, 50, 100)
measurements = true_positions + np.random.normal(0, np.sqrt(R), size=100)
estimates = []
for z in measurements:
# 1. 예측
x_pred = x
P_pred = P + Q
# 2. 업데이트
K = P_pred / (P_pred + R)
x = x_pred + K * (z - x_pred)
P = (1 - K) * P_pred
estimates.append(x)
# 시각화
plt.plot(true_positions, label='True Position')
plt.plot(measurements, label='Measurements', alpha=0.5)
plt.plot(estimates, label='Kalman Estimate', linewidth=2)
plt.legend()
plt.title("Kalman Filter 1D Position Tracking")
plt.xlabel("Time")
plt.ylabel("Position")
plt.grid(True)
plt.show()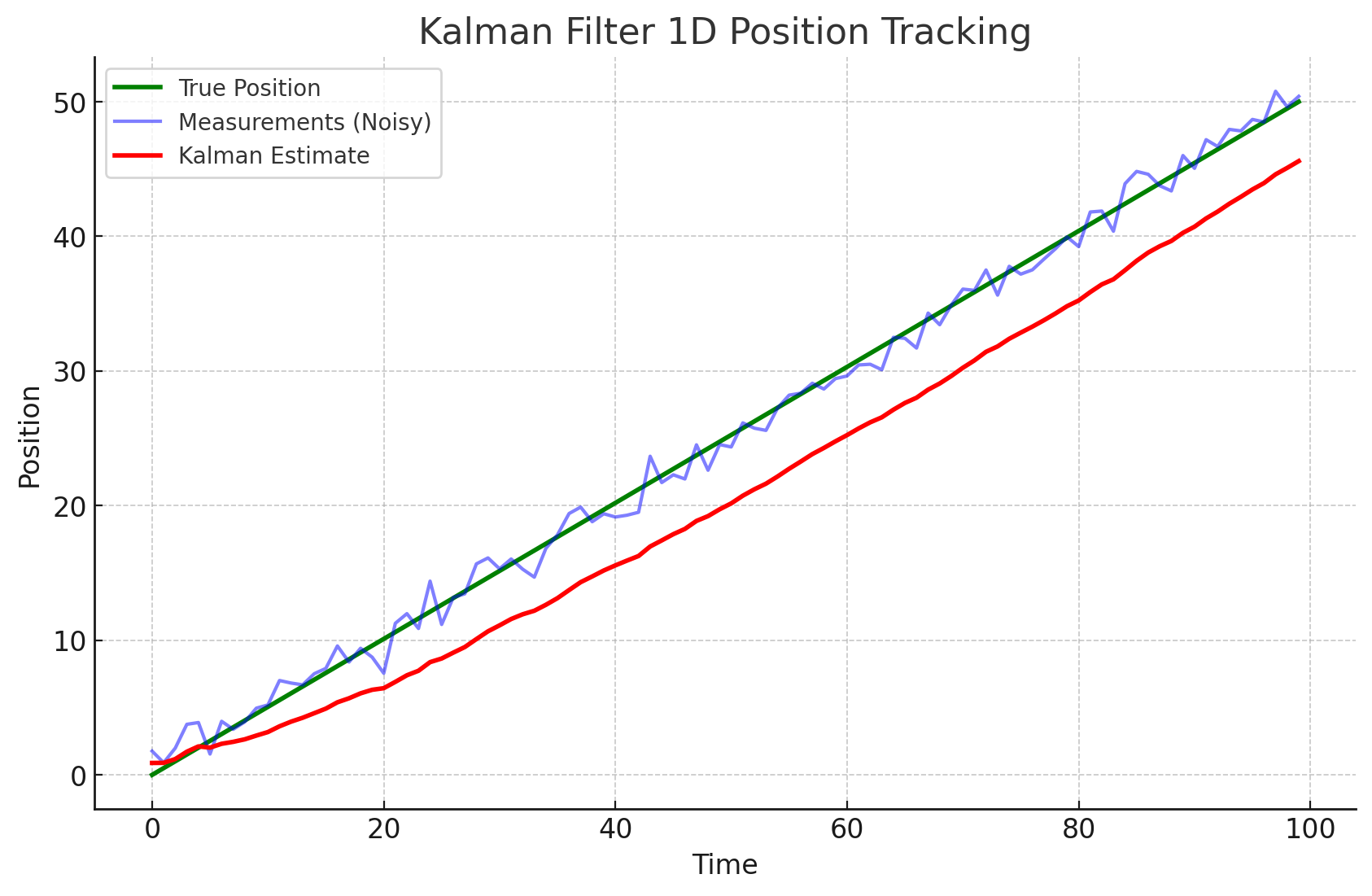
그래프 구성
| 색상 | 의미 | 설명 |
|---|---|---|
| 🟢 초록색 선 | True Position | 실제 위치 (정답값, 기준선) |
| 🔵 파란색 선 | Measurements (Noisy) | 센서로 측정한 값 (잡음 포함) |
| 🔴 빨간색 선 | Kalman Estimate | 칼만 필터가 추정한 위치 (예측 + 보정 결과) |
주요 포인트 요약
- 센서 값(파란 선) 은 들쭉날쭉합니다 → 현실에서 흔한 센서 잡음 상황
- 칼만 필터 추정값(빨간 선) 은 처음엔 차이가 크지만, 점점 실제 위치(초록 선) 에 가까워집니다
- 필터가 반복적으로 보정되면서, 보다 부드럽고 정확한 위치 추정이 가능해지는 것을 볼 수 있습니다
칼만 필터는 단순히 센서 값만 믿지 않고,
예측한 값과 센서 값을 적절히 조합해서 오차를 줄이는 방법입니다.
위 그래프는 칼만 필터가 센서보다 얼마나 더 신뢰할 수 있는 추정치를 만들어주는지를 보여줍니다.
5. 추가로 알아두면 좋은 내용 (EKF/UKF 등)
현실 시스템은 대부분 비선형이기 때문에,
기본 칼만 필터로는 정확한 추정이 어려움
그래서 확장 버전이 필요함
EKF (Extended Kalman Filter)
- 시스템이 선형이 아닐 경우, 테일러 전개를 이용해 선형 근사
- 미분 가능한 모델에 적합 (야코비안 필요)
UKF (Unscented Kalman Filter)
- 시그마 포인트 샘플링을 이용해 비선형 시스템을 더 정확히 처리
- 미분이 필요 없고 예측 성능이 더 뛰어남
비교 요약
| 필터 | 특징 | 비선형 처리 방식 | 복잡도 |
|---|---|---|---|
| KF | 선형만 가능 | 없음 | ⭐ |
| EKF | 근사 가능 | 미분 (야코비안) | ⭐⭐ |
| UKF | 정밀 | 샘플링 기반 | ⭐⭐⭐ |
라이브러리 추천
filterpy→KalmanFilter,ExtendedKalmanFilter,UnscentedKalmanFilter제공pykalman→ 간단한 시계열 예측에 사용 가능
