인공지능_로봇개발
1.현직자가 알려주는 ROS2 Humble 설치방법

ROS wiki에 설치 방법이 잘 나와있지만 초심자에겐 뭐가 뭔 말인지 모를 수가 있다. 특히 영어를 번역한 한글이면 더더욱! 로봇 개발을 하다보면 ROS2를 종종 재설치해야 하는 경우가 있는데 그럴 때를 대비해서 자료를 하나 정리해두기로 했다. IRoboU 유튜브
2.현직자가 알려주는 ROS2 명령어 도구(Command Line interface tools)-1
저번시간에 ROS2 Humble(이하 ROS2)을 설치했다. 아직 설치 못한 사람이 있다면 아래 포스트를 확인해 보길 바란다. ROS2 Humble 설치방법 자 그럼 이번에는 무엇을 배울까? ROS2에는 인공지능/로봇 개발할 때 자주 사용되는 명령어들이 몇가지
3.개발자와 함께하는 ROS2 Humble Node 이해하기, ROS2 명령어-2
저번 포스트에서 ROS2 Humble(이하 ROS2)에서 사용되는 명령어 몇가지를 배웠다. 지난 포스트 링크: ROS2 명령어-1 오늘은 지난시간에 이어 추가로 node에 대한 명령어들을 배워보자 배경지식 1. ROS2 graph란
4.개발자와 함께하는 ROS2 Humble Topic 이해하기, ROS2 명령어-3
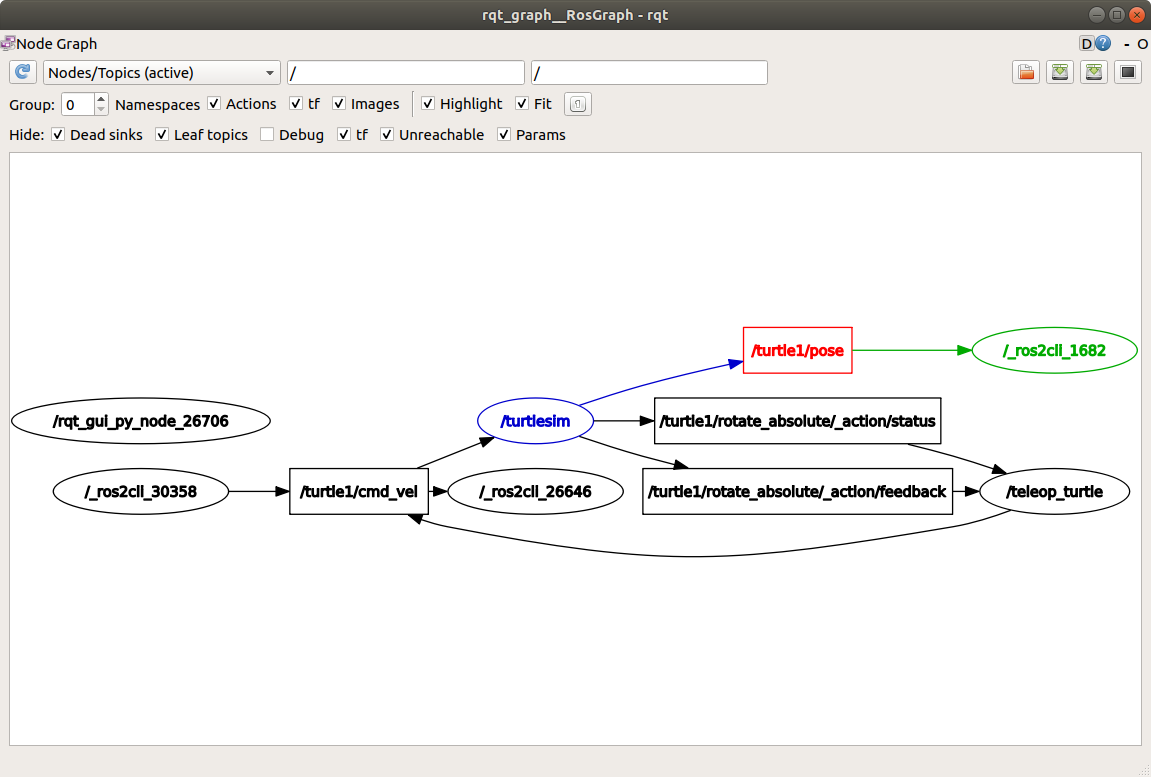
아마 ROS2를 사용해서 인공지능/로봇을 개발하다보면 가장 많이 접하는 용어중에 하나가 topic, node일 것이다. 이번 글에서는 그 중 하나인 topic 개념에 대해서 배워볼 예정이다. 준비되었는가? 그럼 Let's go!! 목표 rqt_graph 명령어
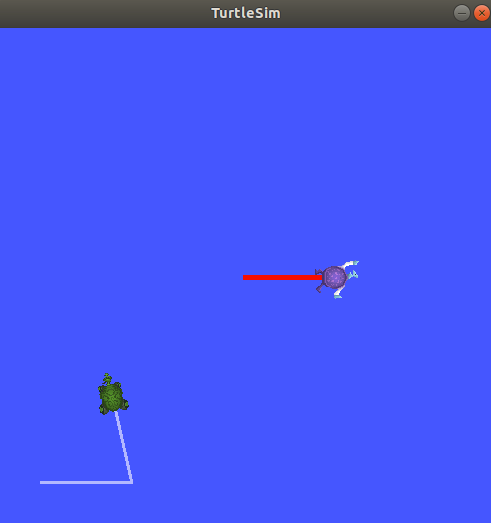
5.개발자와 함께하는 ROS2 Humble Service 이해하기, ROS2 명령어-4
ros topic 다음으로 자주 쓰이는 개념이 service이다. 거두절미 하고 바로 service에 대해 배워보자
6.개발자와 함께하는 ROS2 Humble Parameter 이해하기, ROS2 명령어-5

ros2로 개발하다보면 parameter라는 것을 많이 설정하게 될 것이다. 이 parameter가 무엇인지 오늘 배워보도록 하자!
7.개발자와 함께하는 ROS2 Humble Action 이해하기, ROS2 명령어-6
이번에는 ROS2의 통신 방법 중 하나인 action에 대해 알아보자! 다소 어려울 수 있는 action! 이 글을 통해서 쉽게 이해하고 가자!
8.개발자와 함께하는 ROS2 Humble에서 colcon으로 ROS2 workspace(작업공간) 구성하기
내 package또는 남의 package를 어떻게 build할 수 있을까? ROS2에서는 colcon이라는 툴을 활용한다. 그 사용법과 예시를 실습해보자.
9.개발자와 함께하는 ROS2 Humble에서 작업공간 생성하기

ROS2로 개발할 때 자주 듣게 되는 용어 중 하나는 workspace(작업 공간)이다. 이와 관련된 몇가지 실습을 진행하며 개념을 익혀보자. 목표: workspace를 생성한다. 개발 및 테스트을 위한 overlay 설정 방법에 대해 배운다. tutorial le
10.개발자와 함께하는 ROS2 Humble에서 패키지 만들기

ROS2로 개발할 때 자주 듣게 되는 용어 중 하나는 package(패키지)이다. 이와 관련된 몇가지 실습을 진행하며 개념을 익혀보자.
11.ROS2의 꽃 publisher와 subscriber(C++ 편)

여태까지 명령어랑 개념을 배웠다면 이제는 본격적으로 로봇개발에 기능을 만들 수 있게 해주는 publisher와 subscriber를 작성하는 예시를 이번 시간에 살펴볼 것이다.
12.내 로봇을 한층 더 똑똑하게 ROS2 Service Server와 Client 작성하기

로봇을 개발 할 때 publisher와 subscriber만으로는 똑똑한 로봇을 만드는데 상당한 제약을 받는다. 이번에는 이를 극복하는 것을 도와줄 service server와 client작성법에 대해 알아보자.
13.그래서 어떻게 대화할건데?? ROS2 내 msg와 srv 만들기

복잡한 나만의 msg와 srv interface는 어떻게 만드는 것일까? 이번 포스트를 통해 그 방법을 마스터해보자!
14.더 쉽게 프로그램 실행하세요. ROS2 Launch 파일 공략하기

여태까지 ros2 run으로만 c++ executable를 실행했었다. 커맨드를 일일이 다 치는 것도 너무 번거롭다. 더 쉬운 방법이 없을까?오늘은 ros2 run보다 더 많은 기능을 제공하는 ros2 launch에 대해 배워보자.
15.그럼 node 특성을 결정짓는 parameter는 코드로 어떻게 짤까?
ROS2에서 parameter는 어떻게 코드로 구현할 수 있을까? 오늘은 그 비밀에 대해 파헤쳐보자! C++로 class(node)내에 parameter를 정의하고 실행하는 실습을 진행해본다. 약 20분 추후 공지 준비물
16.의사소통을 더 빠르게! composable node작성하기(C++)

이번시간에는 느려터진 node간 통신에 날개를 달아줄 composition에 대해 마스터해보도록 하자!
17.내 로봇의 에너지를 좀 더 효율적으로! 기능 껐다 켰다 하는 Lifecycle Node구현하기(C++)

Node관리를 효율적으로! Lifecycle Node의 개념을 상세하게 배우고 구현해봅니다.