오류에 대한 지적이나 질문, 토의 환영합니다. 자유롭게 댓글 남겨주세요!.!
선형대수 (Linear Algebra) (4): 좌표계 변환, 선형변환 기초
좌표계 변환 (Change of Basis)
벡터의 표현: 고등 교과 과정 복습
- 벡터의 물리적 표현 (좌표계 없는)
- v의 크기: 화살표 길이
- v의 방향: 화살표의 방향
- 벡터의 수학적 표현 (좌표계 있는)
- 좌표계를 도입한 후 벡터의 시작점을 원점으로 맞추고 끝점의 위치를 벡터 v의 수학적 표현으로 정의헙니다.
좌표계 (coordinate system)
- Ex) 1.
2−벡터 v가 표준좌표계에서 (2,3)으로 표현되어 있습니다.
벡터 (3,1),(1,−2)를 기저벡터로 가지는 새로운 좌표계를 도입했을 때,
해당 벡터는 v는 어떤 좌표값을 가질까요오? (1,−1)
=> A=[3 11 −2][x1x2]=[23]
=> x1[31]+x2[1−2]=2[10]+3[01]
좌표계 A에서 표현된 좌표값 (x1,x2)은 표준 좌표계[1 00 1]에서 좌표값 (2,3)으로 표현할 수 있습니다.

- 다른 방법으로는 역행렬을 구하는 방법도 있습니다.
[x1x2]=A−1[23]
- Ex) 2
3−벡터 v가 표준좌표계에서 (2,1,3)으로 표현되어 있습니다.
벡터 (1,3,1),(1,−2,−2)를 기저벡터로 가지는 새로운 좌표계를 도입했을 때,
해당 벡터는 v는 어떤 좌표값을 가질까요오? (1,1)
=> A=⎣⎢⎡1 13 −21 −2⎦⎥⎤[x1x2]=⎣⎢⎡213⎦⎥⎤
=> x1⎣⎢⎡131⎦⎥⎤+x2⎣⎢⎡1−2−2⎦⎥⎤=2⎣⎢⎡100⎦⎥⎤+1⎣⎢⎡010⎦⎥⎤+3⎣⎢⎡001⎦⎥⎤
좌표계 A에서 표현된 좌표값 (x1,x2)느 표준 좌표계⎣⎢⎡1 0 00 1 00 0 1⎦⎥⎤에서 좌표값 (2,3,1)으로 표현할 수 있습니다.
- 행렬은 선형함수입니다!
- ex) 인공지능에서 합성곱, 역전파 등에 쓰입니다.
함수
-
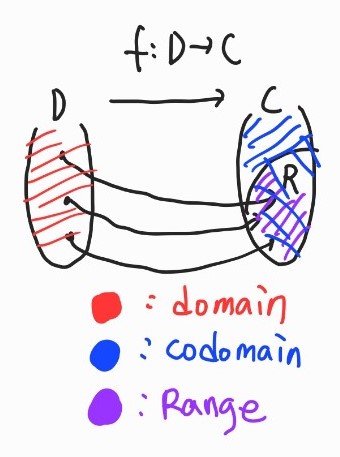
함수는 맵핑 룰(mappeing rule)입니다.
-
정의역 (Domain): 입력이 정의되는 집합을 말합니다.
-
공역 (Codomain): 출력이 정의되는 집합을 말합니다.
-
치역 (range): 실제 함수의 출력이 나오는 부분집합을 말합니다.
ex) y=x2+2x+3
- domain/codomain: R→R or f:R→R
- programming:
float f(float x) { return x*x + 2*x + 3; }- domain:
float x / codomain: float / range: x*x + 2*x + 3
선형함수
- f(x+y)=f(x)+f(y),
- f(cx)=cf(x)
- 위 두 가지 조건을 만족하는 함수 f를 선형함수(linear function)라고 한다.
- 함수의 입력이 n−벡터이고, 출력이 m−벡터인 함수를 변환(transformation)이라고 한다.
- 특별히 입력과 출력이 같은 경우(n=m) 해당 변환을 연산자(operator)라고 한다.
- 예) mnist 손글씨 인식 문제 (비선형 변환)
T:R28∗28→R10
-
m×n 행렬 A에 대해 Ax는 n−벡터를 입력으로 받아 m−벡터를 출력으로 내는 변환 TA(x)=Ax로 볼 수 있습니다.
-
이 변환은 행렬이 정의하기 때문에 행렬변환이라고 합니다.
TA:Rn→Rm
-
그런데 행렬변환은 다음의 선형함수 성질을 모두 만족하기 때문에 선형변환입니다.
- A(x+y)=A(x)+A(y),
- A(cx)=cA(x)
-
A(x+y)=A(x)+A(y)의
좌항 '+' 는 domain에서 이루어진 n−vector 끼리의 덧셈,
우항 '+'는 codomain에서 이루어진 m−vector끼리의 덧셈입니다.
-
A(cx)=cA(x)의
좌항 스칼라 곱은 domain에서 이루어진 n−vector 끼리의 곱,
우항 스칼라 곱은 codomain에서 이루어진 m−vector끼리의 곱입니다.
정리
- m×n 행렬은 n−벡터를 입력으로 받아 m−벡터를 출력으로 내는 선형변환이고,
임의의 선형변환은 행렬로 표현가능합니다.
즉, 행렬은 선형변환의 구현체입니다.
선형변환 코딩하기
행렬을 내가 원하는대로 디자인하는 것
- 구현하고자 하는 기능의 입력과 출력이 벡터로 정의되는지 확인합니다.
- 구현하고자 하는 기능이 선형인지 확인합니다.
- 입력이 n-벡터이고, 출력이 m-벡터이면 m*n 표준행렬을 구성합니다.
표준행렬 구하기
- n−차원 표준기저벡터 {e1,e2,...,en}을 생각합니다.
- 각 n−차원 표준기저벡터 ei에 대해,
우리가 원하는 기능을 동작시켜 얻은 결과인 m−차원 벡터 T(ei)를 표준행렬의 각 열에 적습니다.
예제1. 2차원 벡터를 입력으로 받아, 해당 벡터를 x-축에 프로젝션하는 기능 구현하기
- 생각 1. 이것이 변환인가?
=> 입력이 벡터이면 출력이 벡터여야 합니다.. Yes! (3,2)→(3,0)
- 생각 2. 선형변환인가??? 선형 함수인가?
=> 입력이 직선벡터이고, 출력도 직선벡터여야 합니다.. Yes!
- 생각 3. 선형변환을 행렬로 표현할 수 있다!
=> 입력이 2차원 출력이 2차원인 2×2행렬을 구성할 것입니다.
- 생각 4. 열벡터를 두 번 채우면 되겠군.
- 생각 5. 첫번째 열을 채우면 됩니다.
입력으로 첫 번째 기저벡터(1,0)를 넣었을 때 내가 원하는 기능을 돌려보면 (1,0)이 됩니다.
=> [1 ∗0 ∗]
- 생각 6. 두번째 열을 채웁니다.
입력으로 두 번째 기저벡터 (0,1)을 넣었을 때 내가 원하는 기능을 돌려보면 (0,0)이 됩니다.
=> [1 00 0]
- 생각 7. 함수를 모두 짰습니다. 선형변환 코딩이 모두 끝났습니다.
=> [1 00 0][xy]=[x0]
예제 2. 2차원 벡터를 입력으로 받아, 해당 벡터를 반시계방향으로 θ만큼 회전하는 기능을 구현하기
- 생각 1. 이것이 변환인가?
=> Yes! 벡터를 입력으로 넣으면 출력으로 회전된 벡터가 나옵니다.
- 생각 2. 선형변환인가?
=> Yes 직선을 입력으로 넣었을때 회전된 직선이 나옵니다.
- 생각 3. 입력으로 2차원 벡터, 출력으로 2차원 벡터 2×2행렬을 구성하면 됩니다.
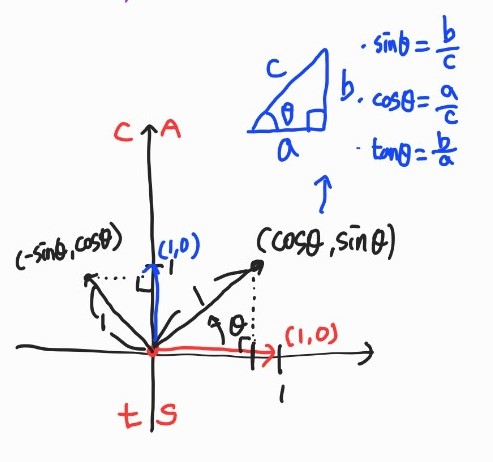
- 생각 4. 열벡터를 채웁니다.
첫 번째 열벡터를 채울 때 domain에서 기저벡터 (1,0)[x축]을 넣고 원하는 기능을 생각해보면 (cosθ,sinθ)가 나옵니다.
=> [cosθ ∗sinθ ∗]
- 생각 5. 두번째 열 벡터를 채웁니다.
기저벡터 (0,1)[y축]을 넣고 원하는 기능을 생각해보면 (cos(θ+90),sin(θ+90))=(−sinθ,cosθ)
=> [cosθ −sinθsinθ cosθ]
- 생각 6. 함수를 모두 짰습니다.
=> [cosθ −sinθsinθ cosθ][xy]=[xcosθ−ysinθxsinθ+ysinθ]
- 참고

이 글은 프로그래머스 스쿨 인공지능 데브코스 과정에서 공부한 내용을 바탕으로 정리한 글입니다.
