👨🏫 본 글은 칸 아카데미의 수업을 듣고 정리한 글 입니다.
- Transpose of a matrix
- Determinant of transpose
- Transpose of a matrix product
- Transpos of sums and inverse
- Transpos of a vector
- Rowspace and left nullspace
- Visualizations of left nullspace and rowspace
Transpose of a matrix
🎈 이번 강의에서는 Transpose matrix(전치행렬)에 대해 학습합니다.
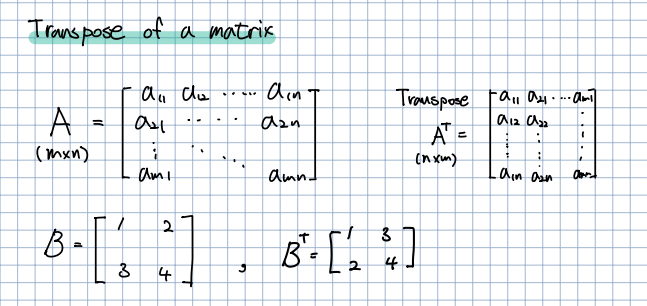
🎈 임의의 행렬 ()이 존재할 때 를 Transpose하면 라고 표기하며 () 크기의 행렬로 바뀌게됩니다. 위의 예시를 보면 대각행렬을 기준으로 서로 바뀌는 것을 알 수 있습니다.
Determinant of transpose
🎈 이번 강의에서는 transpose의 행렬식에 대해 학습합니다.
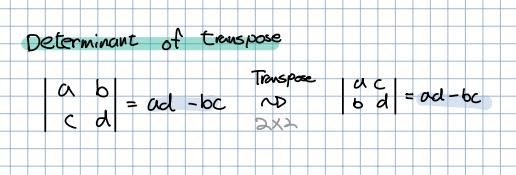
🎈 먼저 크기의 행렬에서는 위와 같이 동일한 det(행렬식)을 가지는 것을 확인할 수 있습니다.
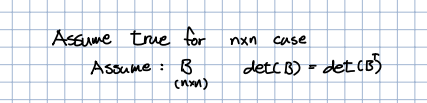
🎈 위와 같이 의 행렬식이 전치행렬가 같다고 가정하면, 의 행렬 또한 행렬식이 같은지 확인해보겠습니다.

🎈 먼저 n+1=m 이라고 생각하고, 임의의 행렬 ()에 대한 행렬식을 구해보겠습니다.
에 대해 구해보면 위와 같은 식이 나옵니다. ()에 대한 행렬식을 구하면 det안의 부분행렬이 전치되는 것을 확인할 수 있습니다.
🎈 과 의 det의 차이는 부분행렬이 전치되었다는 것인데, 각각의 부분행렬은 행렬임을 알 수 있습니다. 앞서 행렬와 전치된 행렬의 행렬식이 같다는 것을 가정했기 때문에, 결과적으로 의 행렬 또한 행렬식 또한 같다는 것을 확인할 수 있습니다.
Transpose of a matrix product
🎈 오늘은 행렬의 Transpose(전치)에 대해 학습합니다.
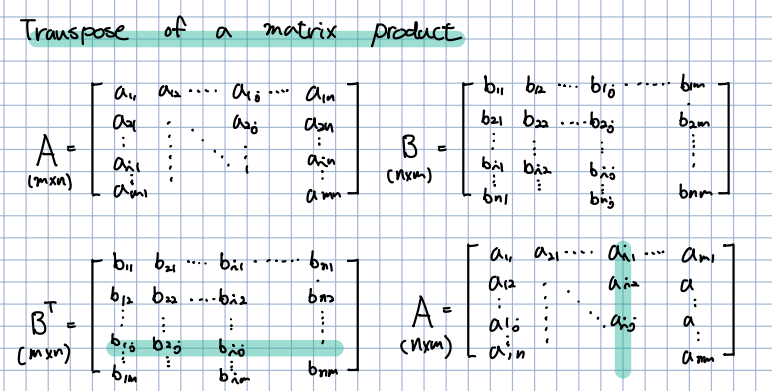
🎈 먼저 행렬 가 존재하며 각각 크기를 가지는 행렬이며, 이들의 전치행렬은 반대의 크기를 가질겁니다.
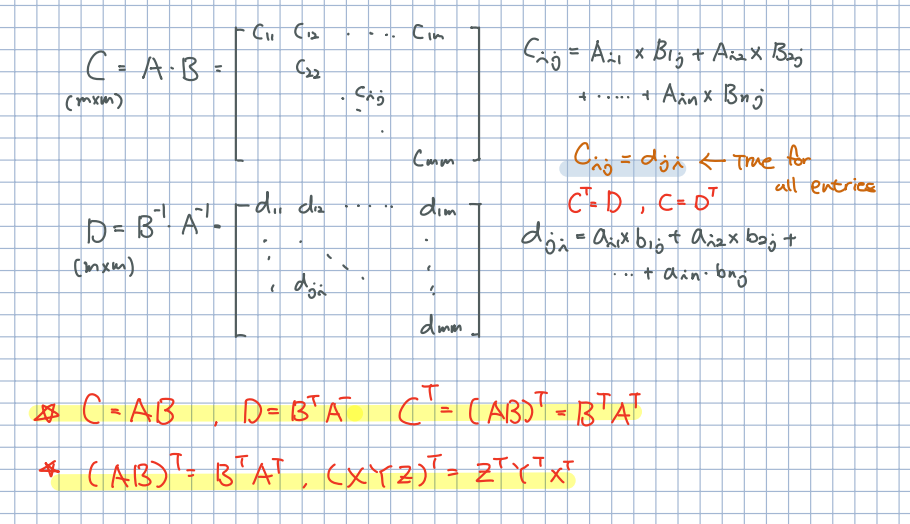
🎈 행렬 를 라고 하며, 는 라고 할 때(위 필기의 -1표시는 오기입니다) 각각의 행렬 의 지점의 값을 위의 식처럼 구할 수 있습니다. 위 식에서 하나 확인할 수 있는 것은 = 라는 것이며, 이는 다시 이야기하면 = D와 같다고 이야기할 수 있습니다.
🎈 결과적으로 임의의 행렬 = 라고 말할 수 있습니다.
Transpose of sums and inverse
🎈 이번 강의에서는 전치행렬의 합과 역에 대해 학습합니다.
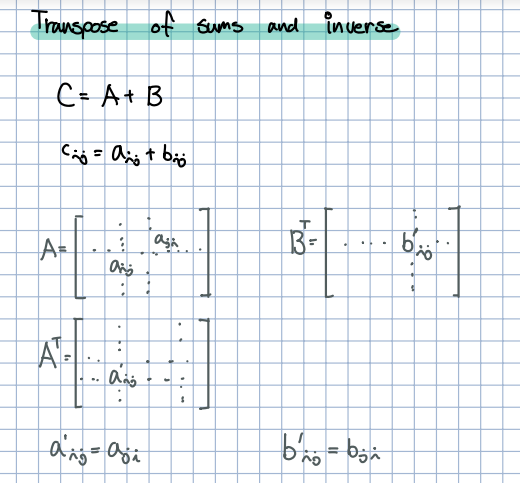
🎈 행렬 = 라고하면, = + 라고 말할 수 있습니다. 의 = , 의 = 라고 말할 수 있습니다.
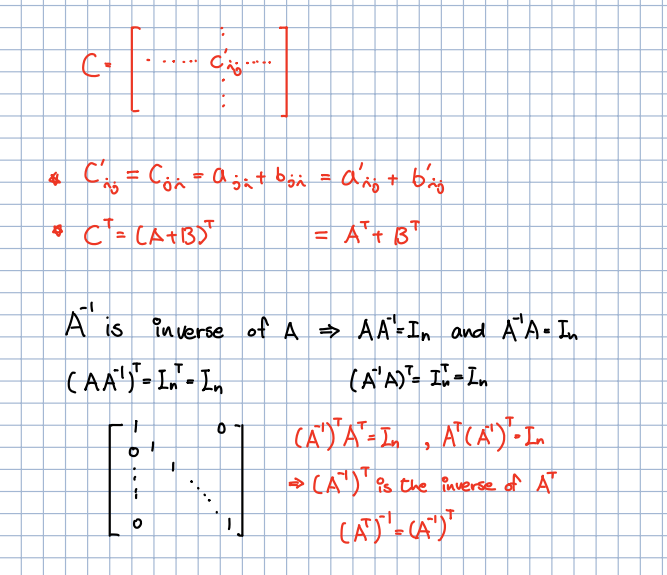
🎈 그렇다면 = = = 라고 말할 수 있습니다. 결과적으로 = 라고 말할 수 있습니다.
🎈 행렬 와 Transpose와의 관계는 위의 식을 따라가다보면 어렵지 않게 이해하실 수 있습니다. 결과적으로 = 입니다.
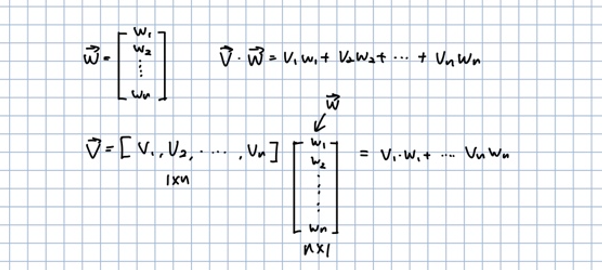
Transpose of a vector
🎈 오늘은 벡터의 전치에 대해 학습합니다.
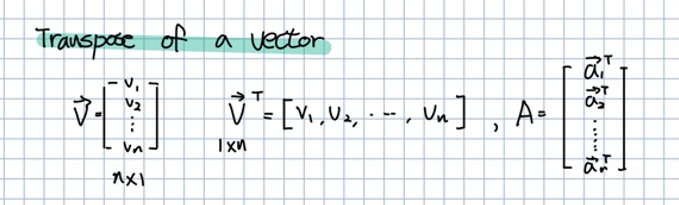
🎈 n x 1 벡터인 을 전치하면 1 x n 벡터인 벡터가 됩니다.
Rowspace and left nullspace
🎈 이번 강의에서는 Rowspace(행공간)과 left nullspace에 대해 학습합니다.
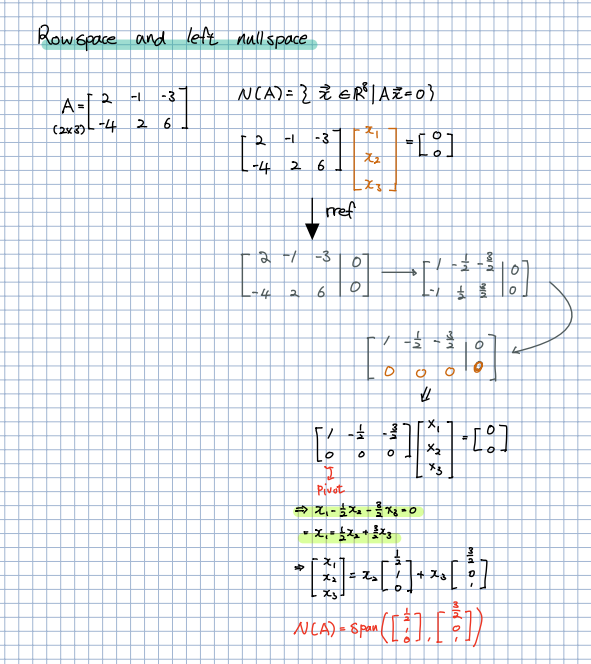
🎈 임의의 행렬 에 대한 영공간을 계산합니다. 이전에 rref(기약행사다리꼴)을 통해 영공간을 계산할 수 있다는 것을 배웠습니다. rref(기약행사다리꼴)을 계산을 하면 pivot table과 free value를 통해 영공간을 찾을 수 있습니다.
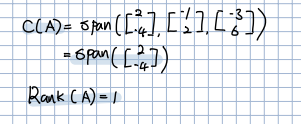
🎈 열공간 의 경우 역시 rref(기약행사다리꼴)을 통해 pivot table을 사용해 쉽게 계산할 수 있습니다. Rank 또한 rref을 통해 구할 수 있습니다.
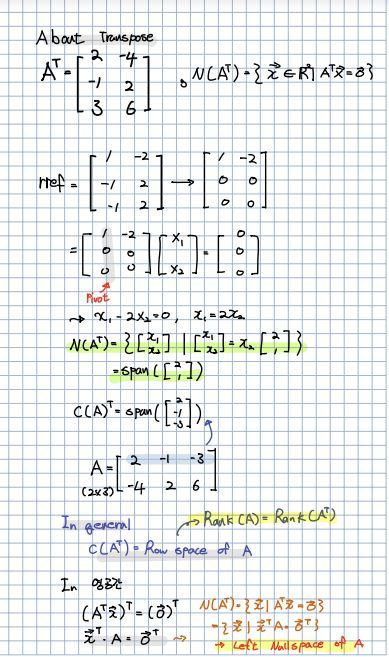
🎈 위의 과정은 지금까지 배웠던 열공간과 영공간에 대해 계산했습니다. 이번에는 임의의 행렬 에 대한 행공간과 left nullspace에 대해 계산합니다. 계산하는 방법은 위의 방법와 동일합니다. rref(기약행사다리꼴)을 통해 계산할 수 있습니다. 다른 점이라고 하면 행렬 기준으로 봤을 때 pivot값과 free value값이 기존의 열공간이 아닌 행공간과 기존의 영공간과 다른 점을 확인할 수 있습니다.
🎈 결과적으로 행공간은 임의의 전치행렬의 열공간이라고 말할 수 있으며, 항상 같은 rank를 가지며, 영공간의 경우에는 같지는 않으면 left nullspace라고 부릅니다.
Visualizations of left nullspace and rowspace
🎈 이번 강의에서는 이전 학습 했던 행공간, 열공간 등등에 대한 관계에 대해 학습합니다.
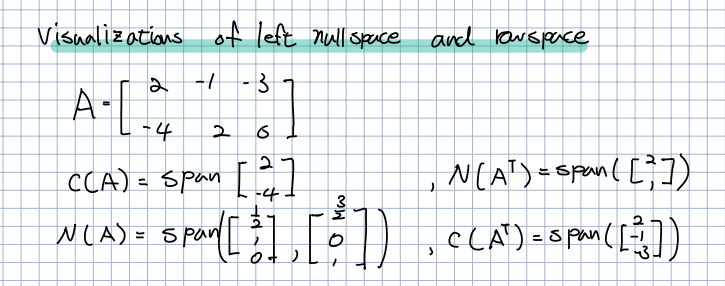
🎈 앞서 배웠던 값들을 그대로 사용합니다.
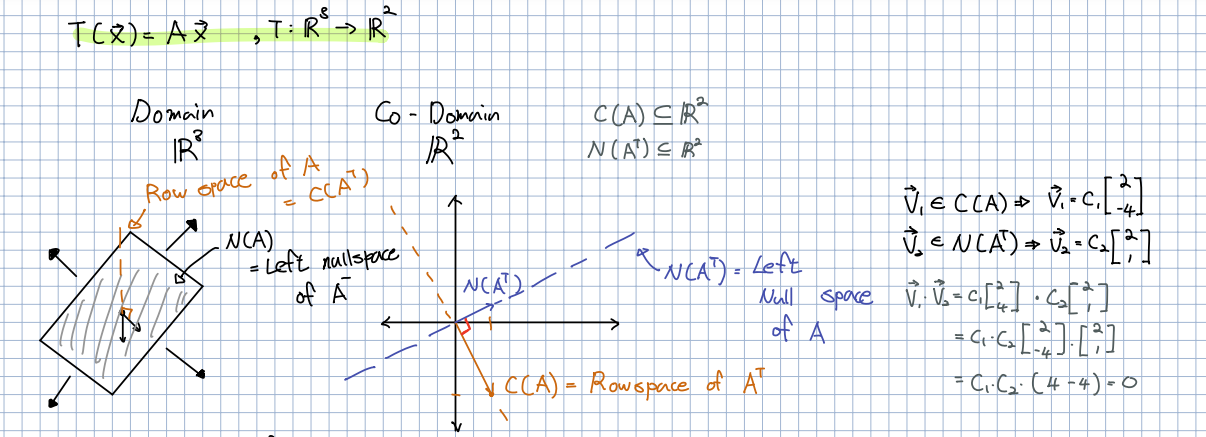
🎈 위의 Co-Domain 영역에서의 와 시각화 하면 위와 같이 표현할 수 있습니다. 위의 그래프에서 확인할 수 있듯이, 와 이 직교하는 것을 알 수 있습니다. 이는 수식적으로도 내적을 통해 확인 할 수 있습니다.
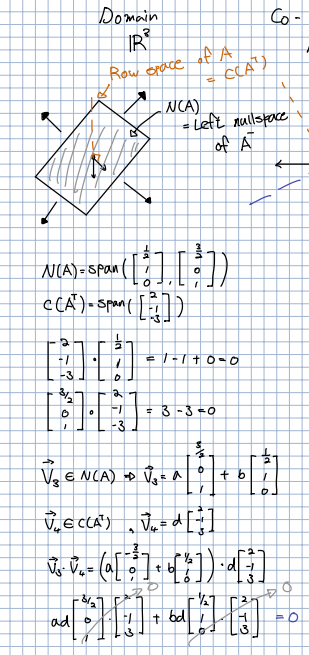
🎈 공간인 Domain 영역에서의 과 시각화 하면 위와 같이 표현할 수 있으며, 이 역시 서로 직교하면 내적이 0인것을 확인할 수 있습니다.
🎈 이에 대한 증명 과정은 다음 강의에서 학습한다고 이야기합니다.