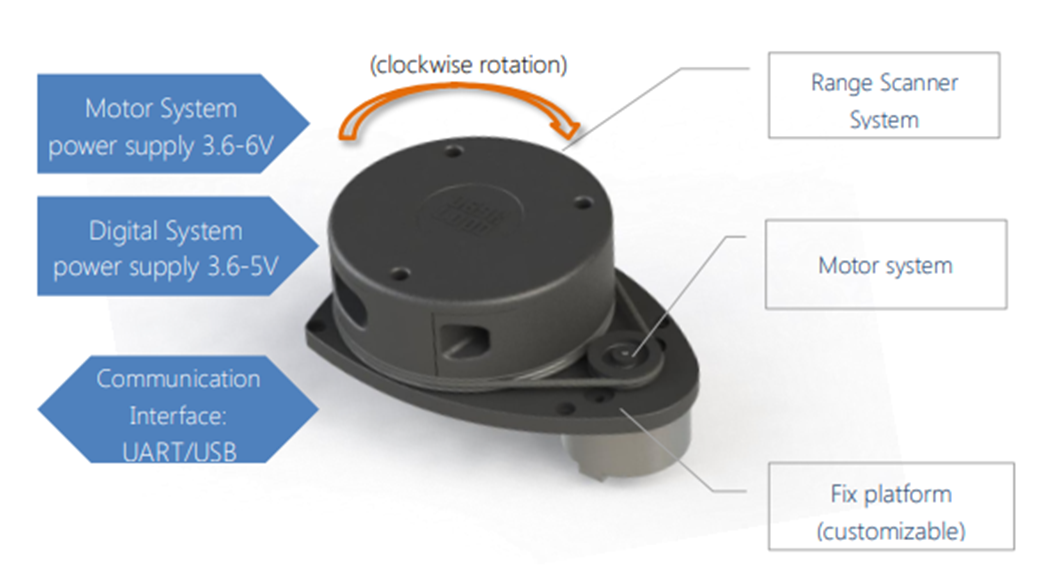
목표 : Lidar 센서를 통해 얻은 값을 이용해서, 앞의 장애물을 회피하도록 알고리즘을 설계한다.
라이다로 거리, 각도 테스트
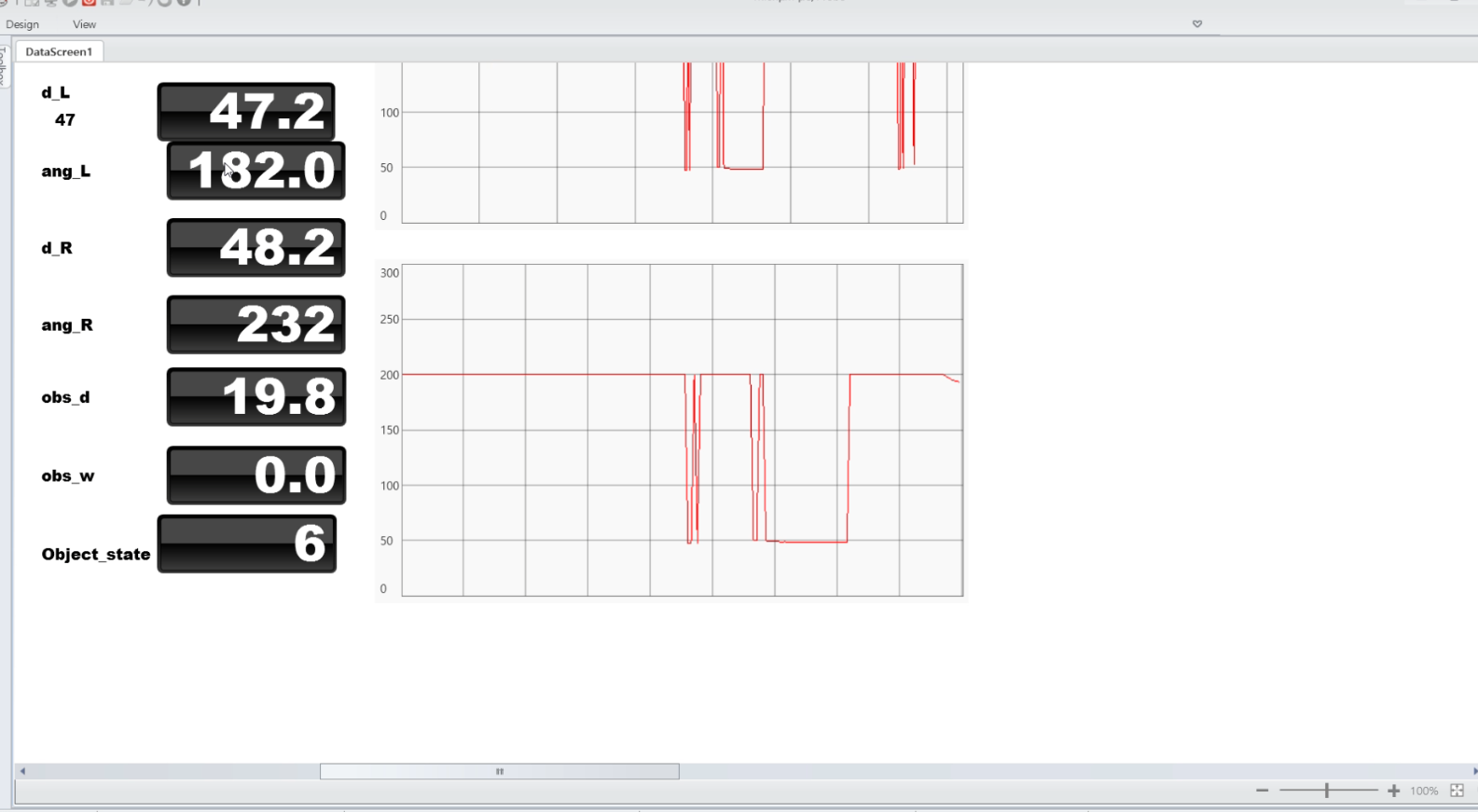
측정되는 값
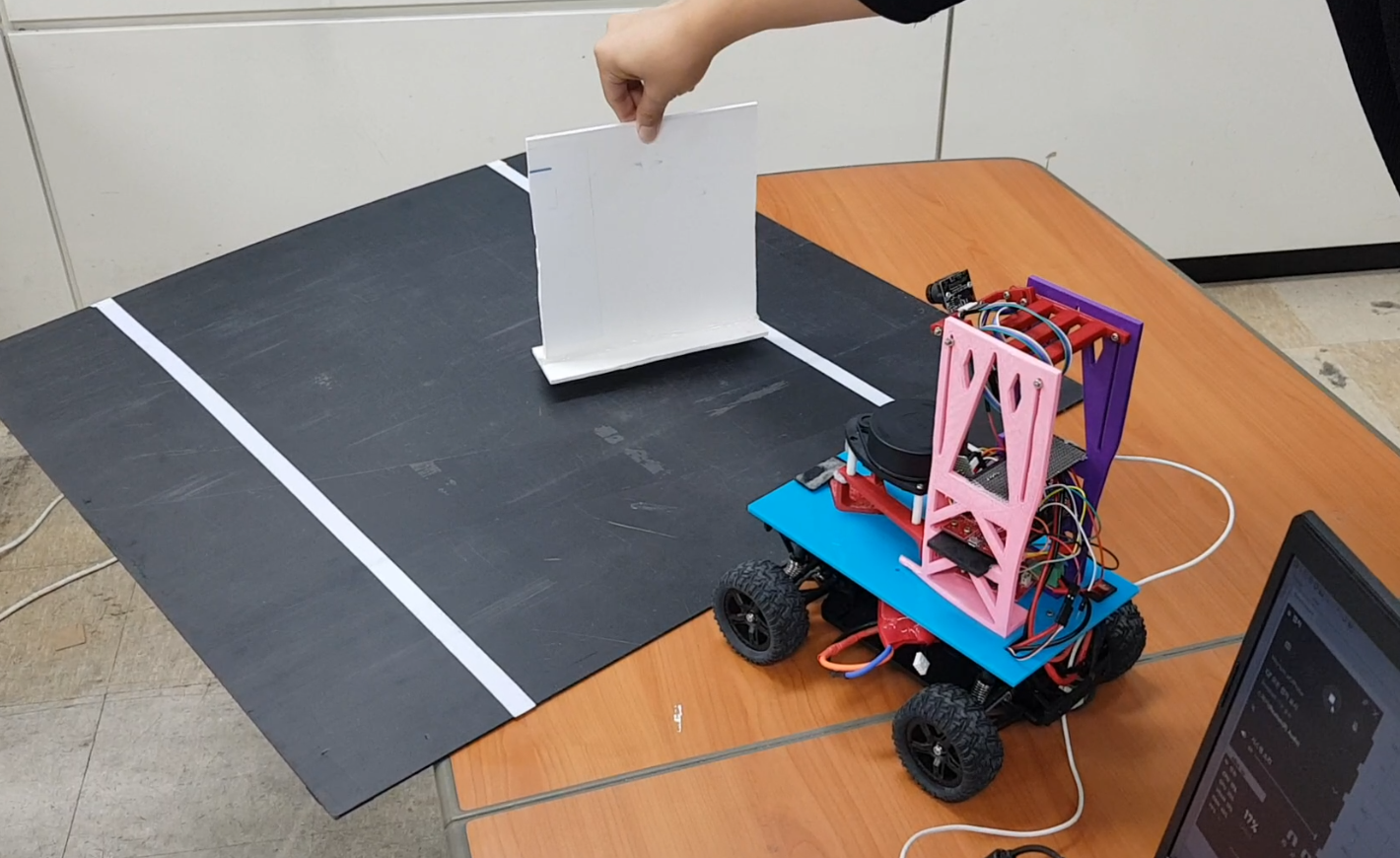
Setting
라이다 센서를 차량에 장착하고, 180도 부분이 앞을 보도록 배치 함.

구조물에 의해서 측정이 불가능한 구역을 없애고, 90도~ 270도 사이의 값을 사용해서 알고리즘을 설계 함.
1. 변수 설정
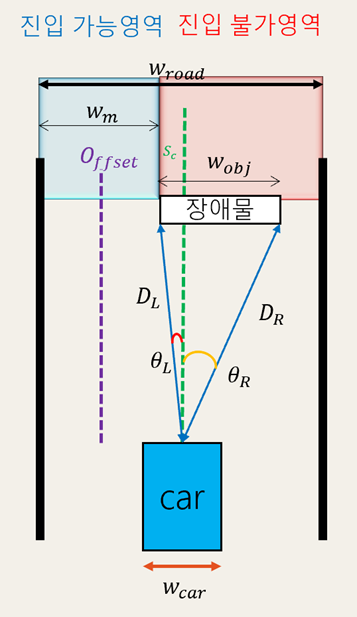
위 사진과 같이,
장애물을 발견했을 때 왼쪽 각도 ~ 오른쪽 각도, 거리를 변수로 설정했다.\
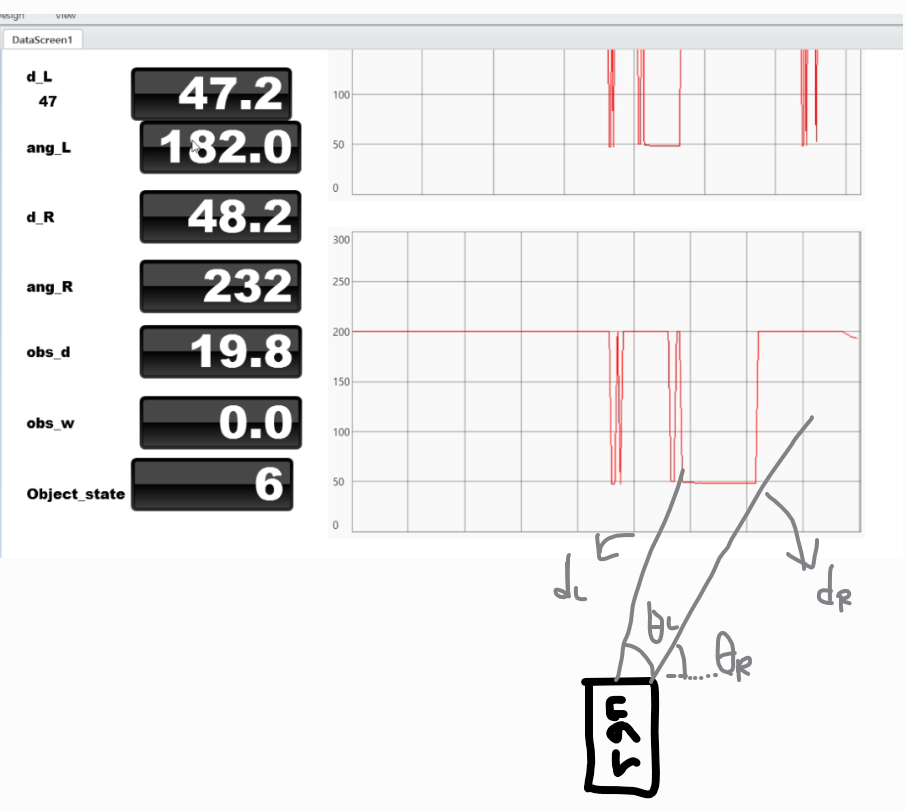
인식되는 범위 안에 들어왔을 경우, 각도와 거리가 측정된다.
2. 상태 머신 설계 (State Machine)
차량이 인식되는 범위를 계속 실험하면서, 크게 3가지 상태로 나누어서 설계 했다.
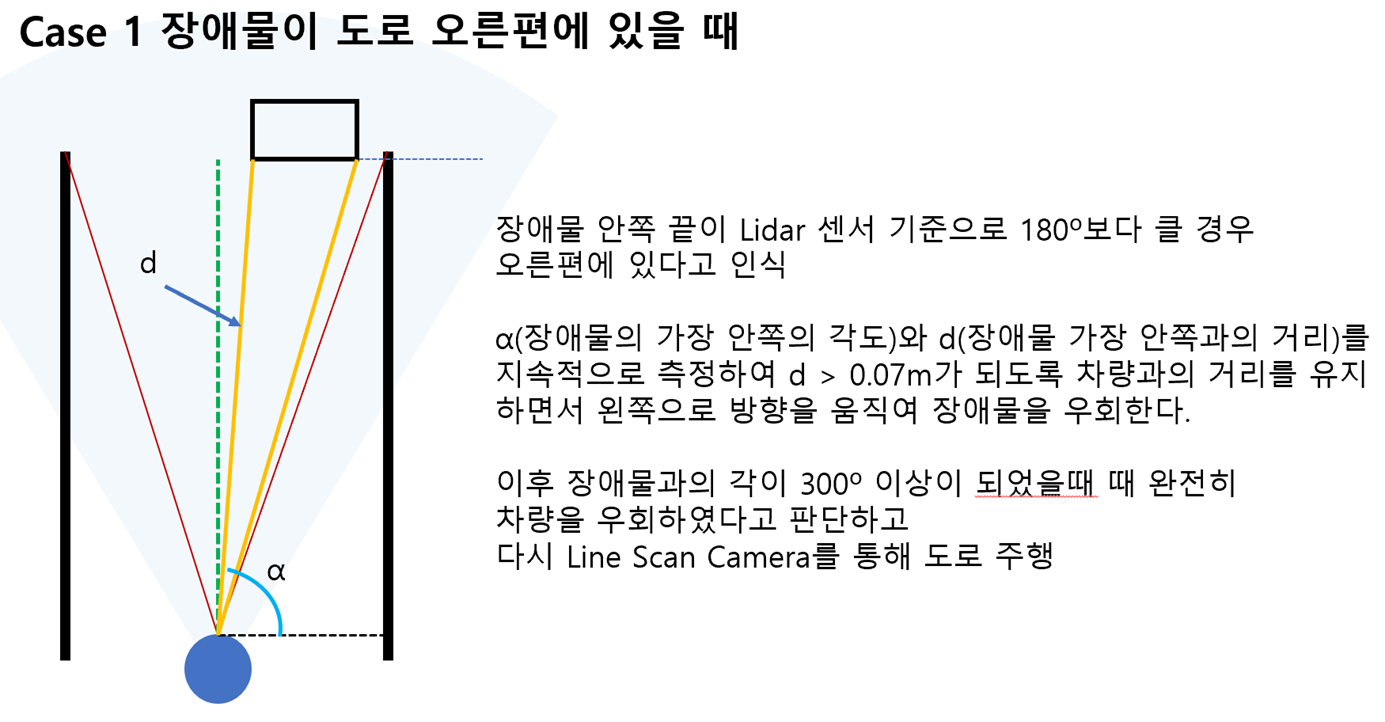
- 장애물이 도로 오른 편에 있을 때
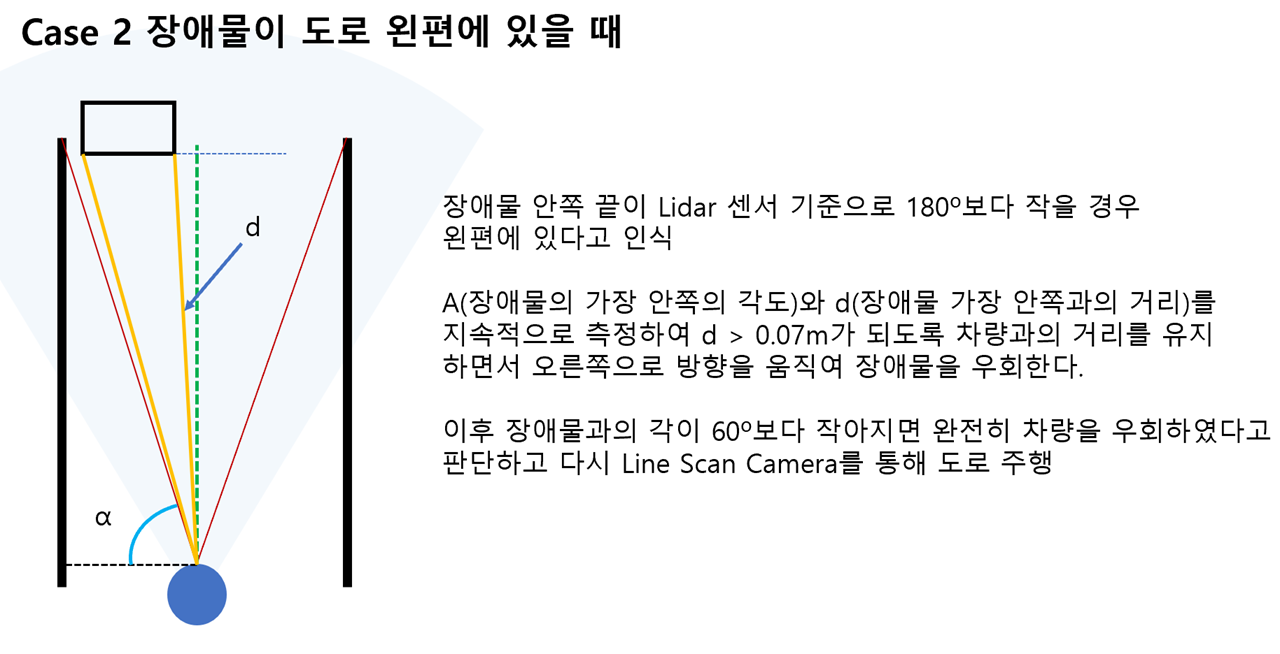
- 장애물이 도로 왼 편에 있을 때
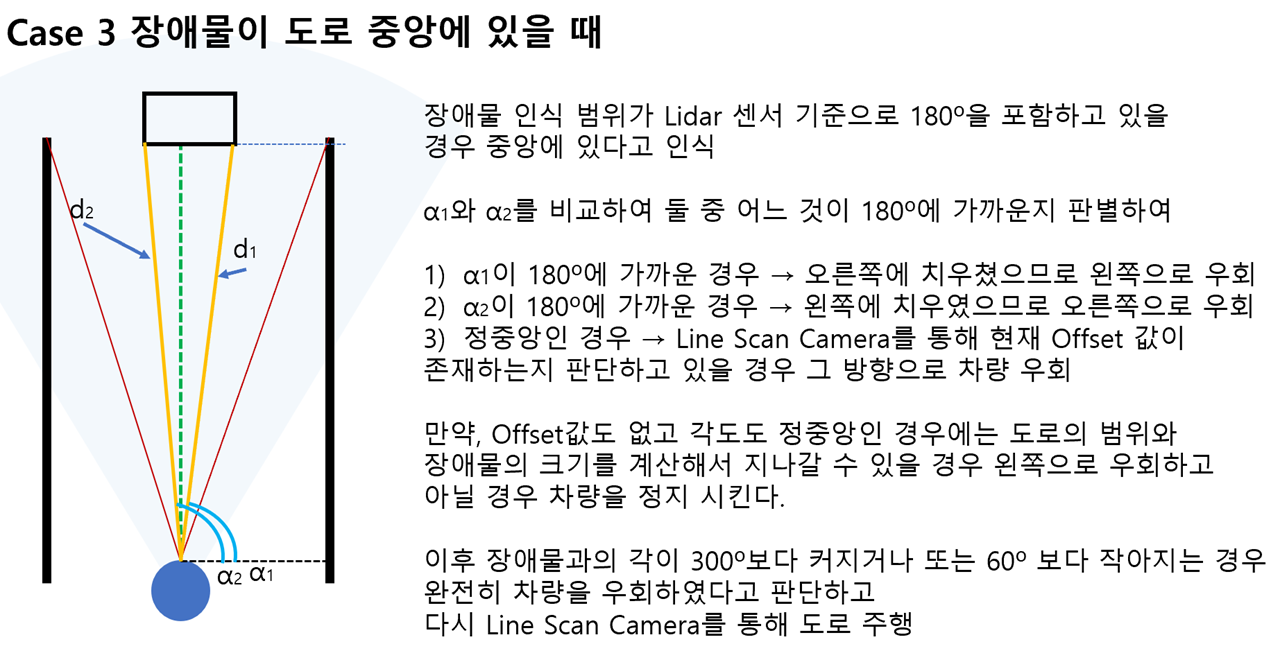
- 도로 중앙에 있을 때
이렇게 설정하고 알고리즘을 제작하면, 한 가지 예외경우가 발생하게 된다.
theta_L이 왼쪽인식, theta_R이 오른쪽 인식이라고 했을 때
theta_L <= 차 중앙 <= theta_R
일 경우, 1번 2번 상태가 나오지 않는다.
그래서 다시 3번의 조건을 세분화 했다.
-
장애물이 도로 오른 편에 있을 때
(차 중앙 <= theta_L <= theta_R)
-
장애물이 도로 왼 편에 있을 때
(theta_L <= theta_R <= 차 중앙)
-
도로 중앙에 있을 때 (theta_L <= 차 중앙 <= theta_R)
장애물의 폭을 계산해서 통과가 가능한지 판단.
(1) 도로 오른 편에 있을 때
(2) 도로 왼 편에 있을 떄
(3) 장애물 통과가 불가능한 경우
3. 코드 구현
우선 장애물의 폭을 측정하는 방식은 Case별로 당연히 달라진다.
인식하는 각도에 따라 Case를 나누고, 측정되는 값에 따라 삼각함수를 이용한다면 장애물의 폭이 계산가능하다.
if((objFlag == 1 && P.ang_L<=(185+Set_Angle*25)) && (P.ang_R>=(175+Set_Angle*25))){
Obj_state = Deflection_No;
}
else if(objFlag == 1 && P.ang_L>(183+Set_Angle*25) && P.ang_L<(Road_ang+(180+Set_Angle*25))){ //Line Scan Camera의 조향 값을 받아와서 차량 주행 방향에 맞춰서 사용 각도 범위 변환
Obj_state = R_On_Road;
}
else if(objFlag == 1 && P.ang_R<(177+Set_Angle*25) && P.ang_R>((180+Set_Angle*25)-Road_ang)){
Obj_state = L_On_Road;
}
else{
Obj_state = No_Object;
}