알고리즘 통합
앞서 4개의 게시물에 만든 2개의 알고리즘을 합쳐서 도로를 피하도록 만들려고 한다.
Scheduler를 사용해서 두 개의 알고리즘을 동작시키면, 선 안에서 장애물을 회피하면서 주행이 된다.
하지만, 실험을 반복하면서 주행에 실패하는 경우가 생긴다.
여기서 문제를 분석하는데, 많은 시간이 소요됐다.
이유는 알고리즘을 하나씩 실험하면 문제가 안생긴다.
두 개의 알고리즘을 같이 실행시키면서 분석한 결과,
장애물의 색에 따라 달라진다는 것이다.
정해놓은 트랙은 검은 판, 흰 선이다.
흰 선 = 밝은 색을 선으로 인식.
어두운 선 = 선으로 인식하지 못하고 도로라고 인식.
그렇다면,
흰 장애물 = 선으로 인식 (문제 X)
어두운 장애물 = 장애물이 선을 가리고 있다면, 인식 못함 (문제 ㅇ)
이 문제를 해결하기 위해서, 알고리즘 우선 순위, 변경 여러가지를 고민했다.
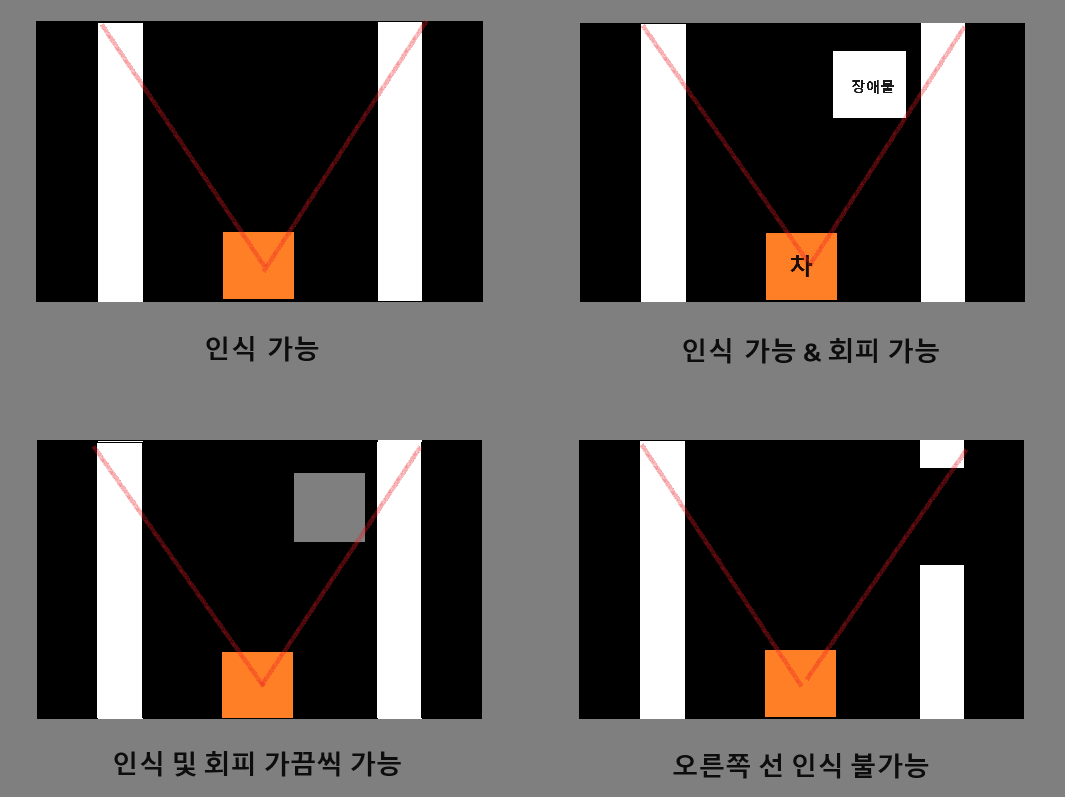
(문제를 분석하면서 생각한 것은 그림으로 그림)
그러면서 생각난 것은 장애물 폭과 위치를 알고 있으니, 장애물의 위치를 선이라고 만든다면 해결할 수 있겠다는 생각이 들었다.(장애물은 선으로 인식하는 것이 아니라 높이로 판단하니까!)

이렇게 하기 위해서..
1. 라인 스캔을 먼저한다.
2. 장애물 인식하는 알고리즘으로 장애물 왼쪽 벽의 위치를 알아낸다.
이렇게 알고리즘을 바꿔서 성공했다.!

열정이 전부였던 개발자