1. GitClone
git clone https://github.com/mats-robotics/yolov5_ros.git2. 카메라 토픽설정
우선 ros usb_cam 설치한뒤
작업환경의 카메라 설정값을 변경해준다
cd catkin_ws/src/yolov5_ros/launch/roslunch경로로 이동한뒤에
gedit yolov5.launch 텍스트편집기를 열어준다.(본인의 경우 gedit)
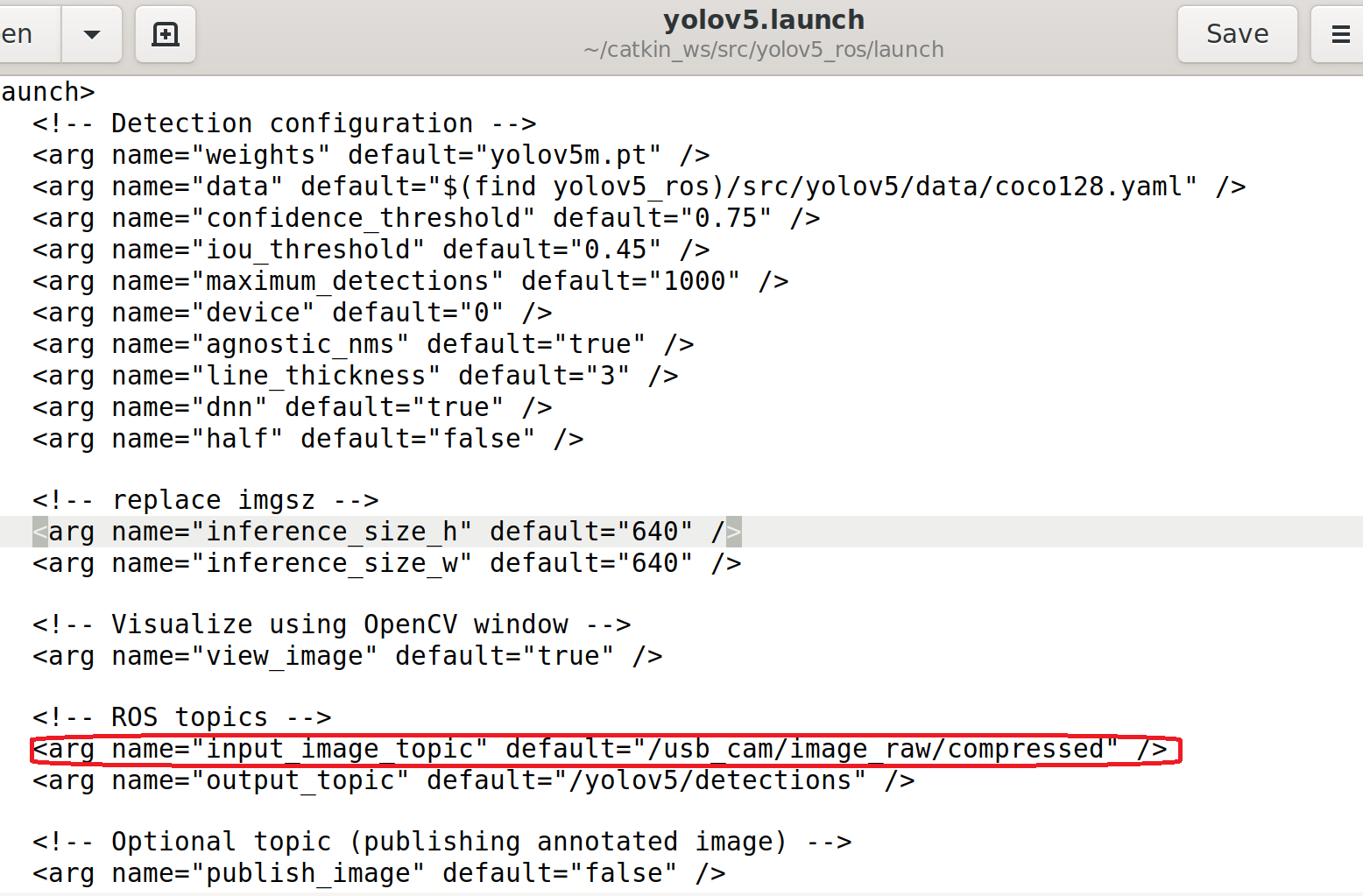
그리고 "default=" 여기를 '/usb_cam/image_raw/compressed' 로 바꿔준다.
'/usb_cam/image_raw/compressed'는 ROS 에서 사용하는 토픽이름인데 이 토픽은 USB카메라에서 압축된 이미지 데이터를 발행하는 데 사요된다. ROS 위키에서 다른 토픽을 찾아볼 수 있다.
3.실행
rosrun usb_cam usb_cam_node카메라실행 //terminal1
roslaunch yolov5_ros yolov5.launch욜로실행 //terminal2
