ROS
1.ROS-YOLOv5실행해보기
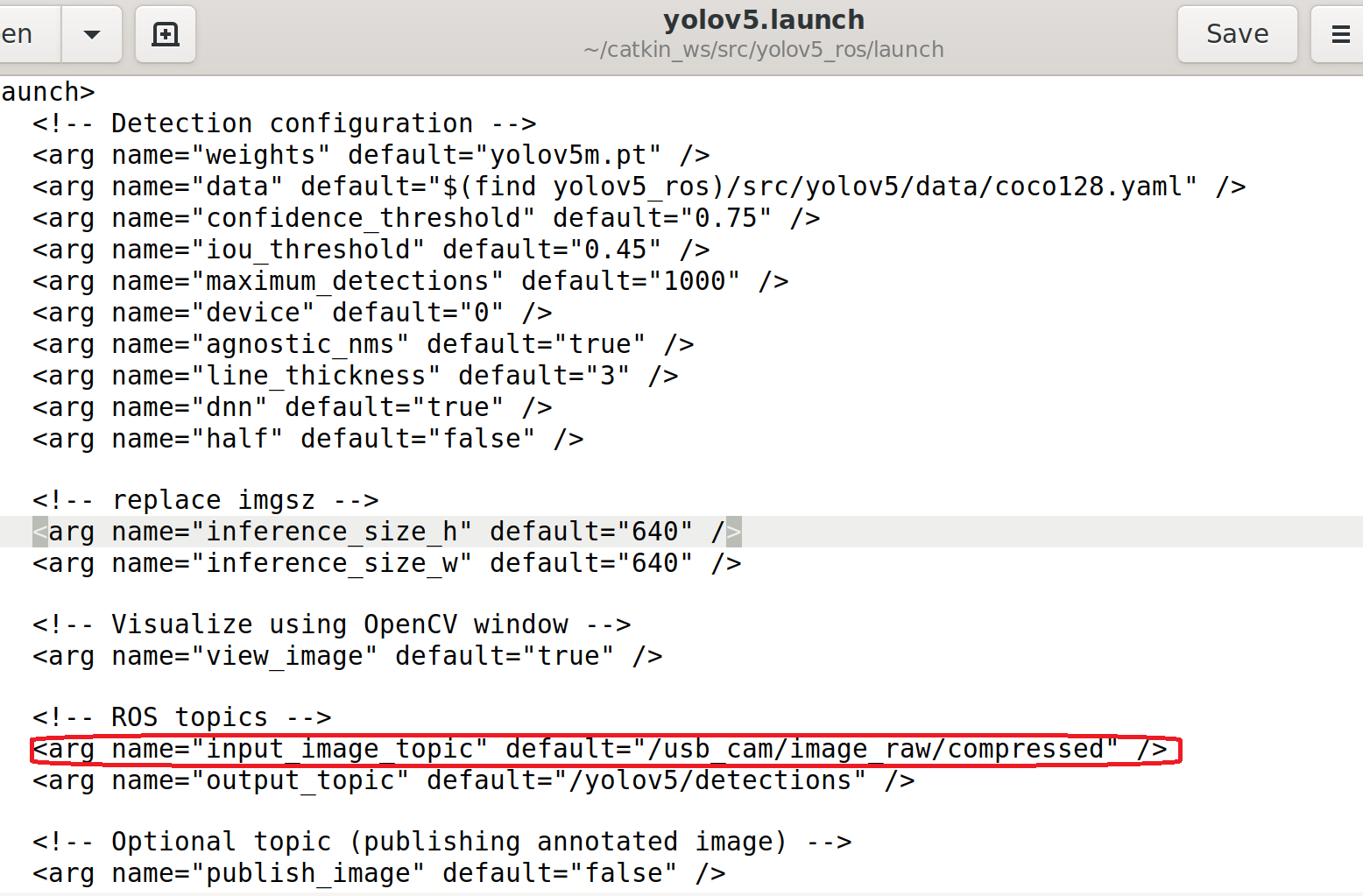
우선 ros usb_cam 설치한뒤 작업환경의 카메라 설정값을 변경해준다roslunch경로로 이동한뒤에텍스트편집기를 열어준다.(본인의 경우 gedit)그리고 "default=" 여기를 '/usb_cam/image_raw/compressed' 로 바꿔준다.'/usb_ca
2024년 5월 2일
2.Jetson Orin OS설치 및 부팅
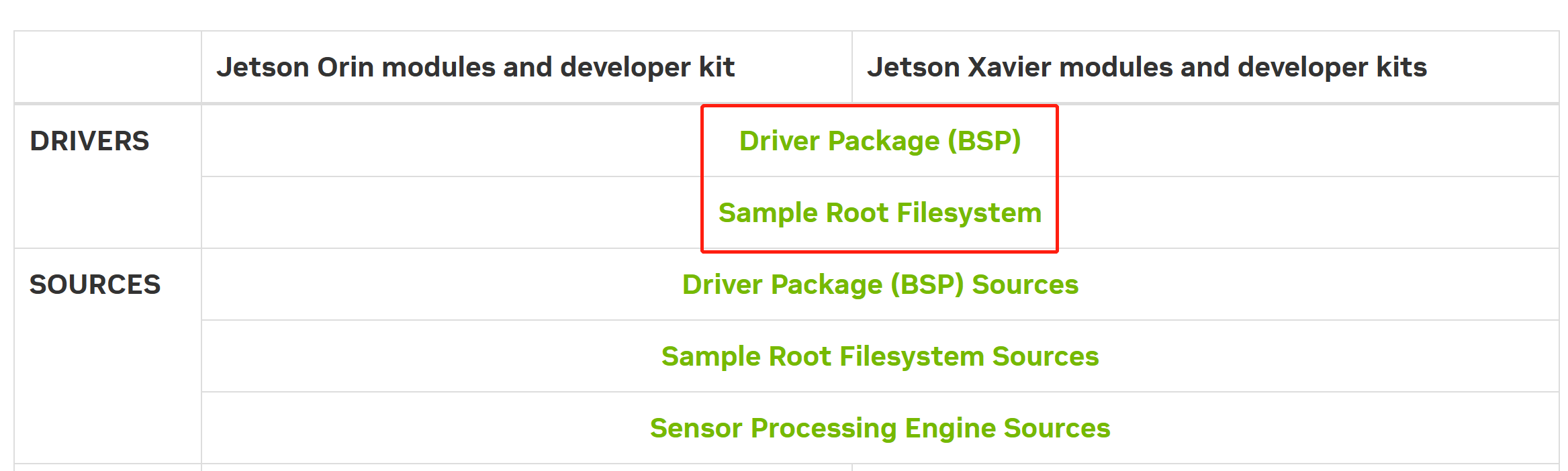
jetson orin이란? NVIDIA Jetson AGX Orin 모듈은 NVIDIA Jetson 제품군 중 가장 성능이 뛰어난 최신 모델이다. 이러한 모듈은 동급 최고의 에너지 효율로 엄청난 성능을 제공한다. 포괄적인 NVIDIA AI 소프트웨어 스택을 실행하여
2024년 5월 1일
3.Zbar 사용 및 QR코드 생성

install 실행 zbarcam을 사용하여 웹캠으로 실시간 스캔하는 방법 zbarimg 명령어를 사용하여 이미지를 스캔 위 두 방법 중 원하는 방법을 사용하여 zbar를 실행하면 된다. 필요에 따라 zbar-tools가 제공하는 다른 명령어들도 사용할 수
2024년 6월 11일
4.Scout Mini + Ouster LiDAR 기반 ROS 2 네비게이션 시스템 구성
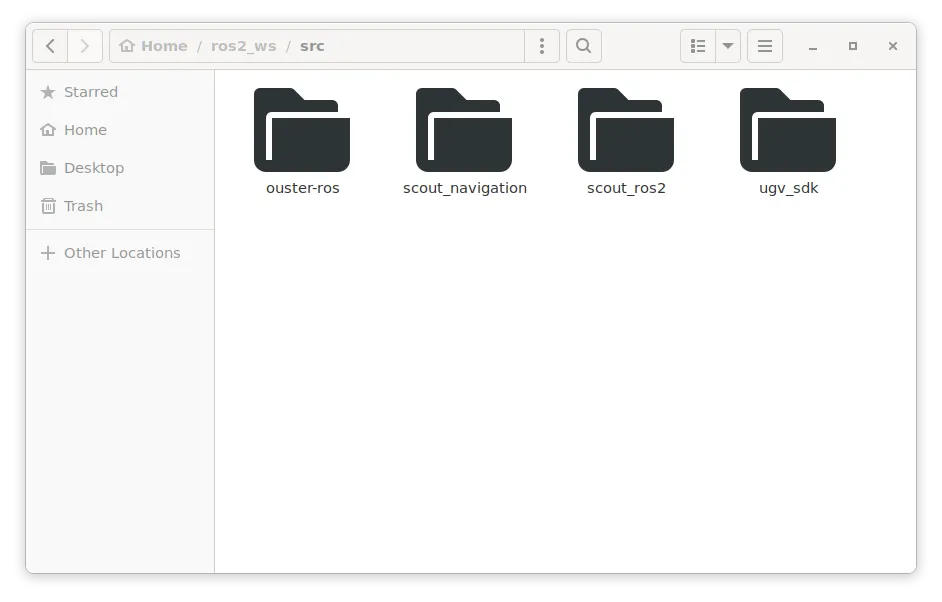
[스카웃미니]:https://roas.co.kr/scout-mini/
2025년 4월 19일
5.WSL2(24.04) ORB-SLAM3 + RealSense D455 실행하기
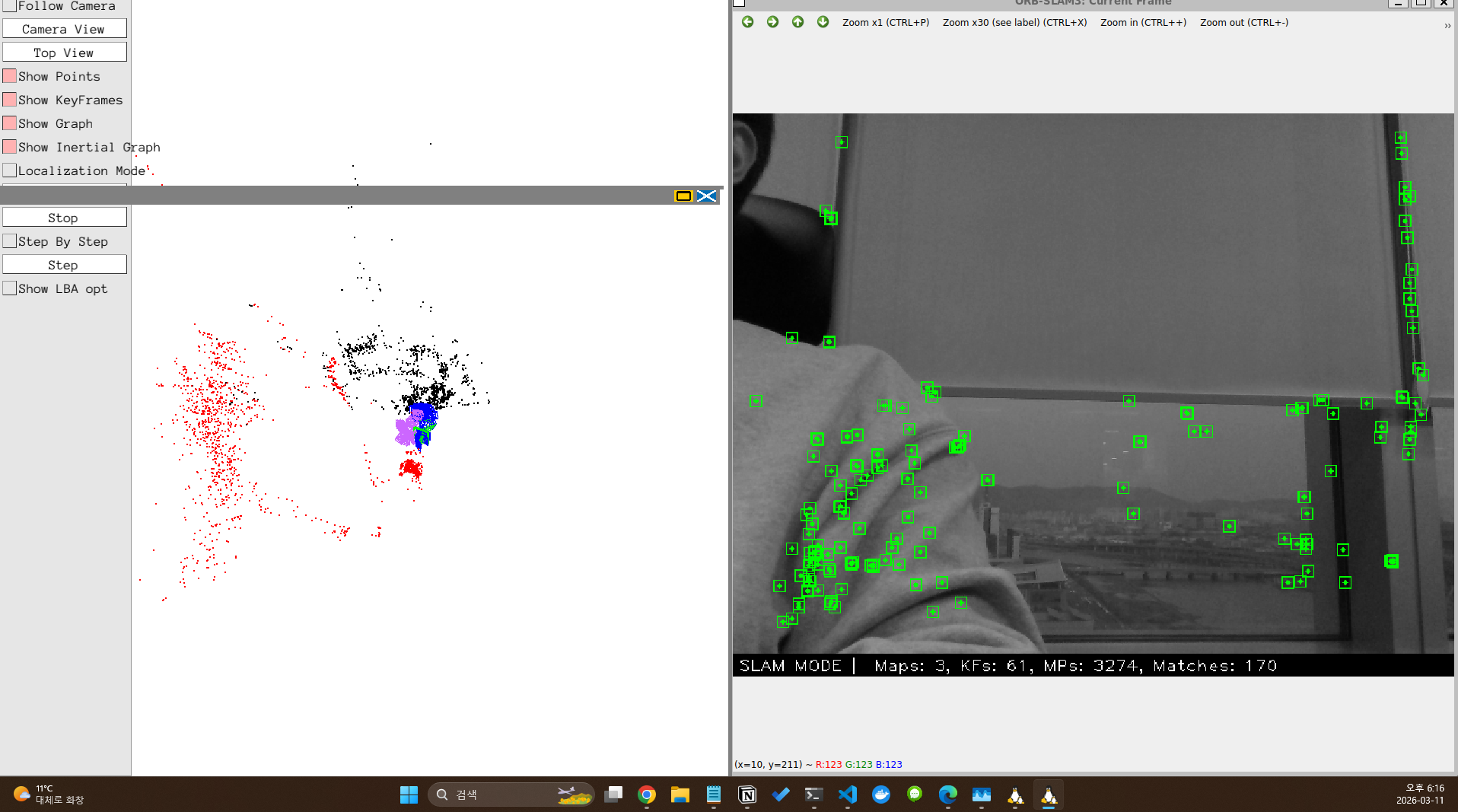
OS: WSL2 + Ubuntu 24.04 LTSGCC: 13.3.0CMake: 3.28OpenCV: 4.6.0Python: 3.12카메라: Intel RealSense D455ORB-SLAM3 공식: https://github.com/UZ-SLAMLab/OR
2026년 3월 11일