
- 다음 내용은 [CS-188] Introduction to Aritificial Intelligence, UC Berkeley, Fall 2018의 Readings-Note2을 정리하였음을 밝힙니다.
- 스스로 이해하기에 영문 용어가 이해하기 직관적이면 그대로 사용했습니다.
Structure
트리 구조의 CSP 문제를 풀 때 에서 으로 시간 복잡도를 줄일 수 있다. 이때 트리 구조라는 뜻은 제약조건 그래프 내에서 사이클이 없다는 뜻이다. 주어진 CSP가 트리 형태라면 다음과 같이 진행하자.
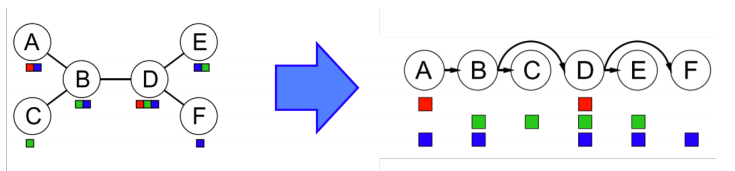
- 루트 노드를 택한다. 아래 그림에서 노드 A를 루트 노드로 고르자.
-
트리를
사이클이 없는 방향 그래프로 만든다. 루트를 중심으로 모든 연결된 간선을 "뻗어 나가는" 형태로 만들어야 한다. 루트 노드 A가 tail이 된 형태로 연결된 간선을 연결하고, topological sort를 통해 트리를 linearlize한다. -
arc consistenc에 따라 backwards pass한다. 즉 부모 노드의 도메인 값이 변경되면 부모 노드와 연결된 노드의 도메인 값을 확인해야 한다. 가령 노드 A와 노드 B를 비교해할 때 A의 파란색 값이 제거되고, B와 C를 비교할 때 B의 초록색 값이 제거된다.
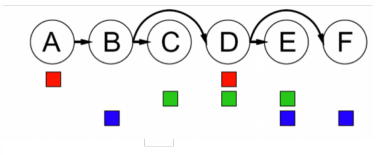
- backwards pass(부모 노드 → 자식 노드 arc consistency 확인)이 끝난 뒤 거꾸로 forward assignment를 시작한다. 도메인 값을 확인하는 게 아니라, 정말로 각 변수에 할당할 색깔을 남아 있는 도메인에서 골라야 한다.
backwards pass에서 부모/자식 노드 간의 arc consistency를 확보했기 때문에 forward assignment 과정에서 어떤 색을 골라도 arc consistency가 사라지지 않는다. 즉 solution이 가능하다.
Cutset Conditioning
컷셋 알고리즘을 통해 위와 비슷하게 트리 형태 CSP를 풀 수 있다.
- CSP 그래프를 CSP 트리 형태로 만들자. 즉 특정 변수들을 그래프에서 떼어냈을 때 트리가 되는
가장 작은 규모의 변수들, 컷셋(cutset)을 찾자. 아래 map-coloring 그래프에서 SA 노드를 제거하면 나머지 5개 노드는 트리가 된다. 즉 SA가 가장 작은 규모의 변수 집합, 컷셋이다.
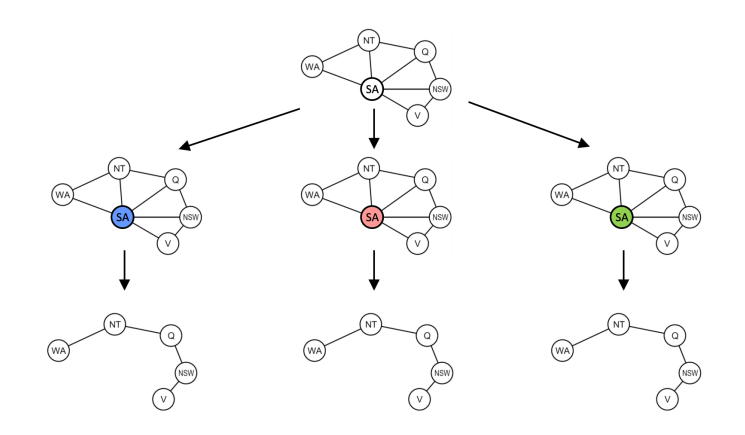
- 컷셋을 떼어나고 남은 트리를 앞의 알고리즘(backwards pass + forward assignment)으로 풀자.
- time complexity: 컷셋의 크기를 충분히 작은 라고 하자. 컷셋을 프루닝한 뒤 다시 백트래킹한다면 도메인의 크기가 일 때 번 해야 한다. 전세 변수의 개수가 개이므로 트리 구조 알고리즘은 변수 개를 각 도메인의 크기 에 맞춰 두 번 확인(backward + forward)하면 된다. 즉
컷셋 크기에 따른 백트래킹 비용과트리 구조 알고리즘 비용의 곱이므로 이다. CSP를 brute force로 풀 때에는 이 필요하다는 점에서 효율적이다.
따라서 충분히 작은 규모의 컷셋 c를 고를 수 있다면 곧바로 트리 알고리즘으로 CSP를 풀 수 있다. trade-off를 고려해 필터링과 정렬, 트리 알고리즘 중 CSP 풀이 방법을 선택하자.
Local Search
로컬 탐색 역시 백트래킹과 같이 CSP를 푸는 유용한 알고리즘이다. 최소 충돌 휴리스틱(min-conflicts heuristic)을 사용해 가장 제약 조건과 충돌이 적은 값을 변수에 반복적으로 할당해가며 답을 찾을 수 있다.
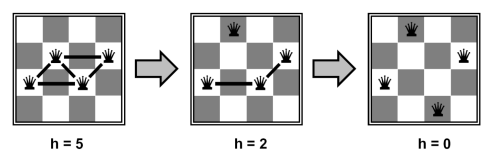
위 N-queens 문제에서 h는 퀸 사이에서 발생하는 가능한 충돌의 수로, 각 변수 퀸을 확인할 때 이를 최소화하는 값을 할당하면서 퀸의 위치를 변경한다. 반복적으로 값을 할당하면서 h==0이라는 문제 해결 상태에 도달할 때까지 로컬 탐색이 반복된다.
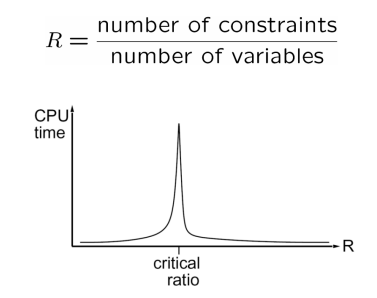
하지만 로컬 탐색은 백트래킹 알고리즘과 달리 특정 조건을 만족하지 못할 때 최적의 답을 찾지 못할 수 있다. CSP 문제의 제약 조건과 변수의 수 비율 R에 따라서 로컬 탐색에 사용되는 비용이 매우 비싸기 때문이다.
CSP 문제를 해결하는 알고리즘이 백트래킹만이 아니라 로컬 탐색 역시 있다는 사실만 기억해두자. 하지만 로컬 탐색은 특정 조건에서 매우 실용적이지 못할 수 있다.
