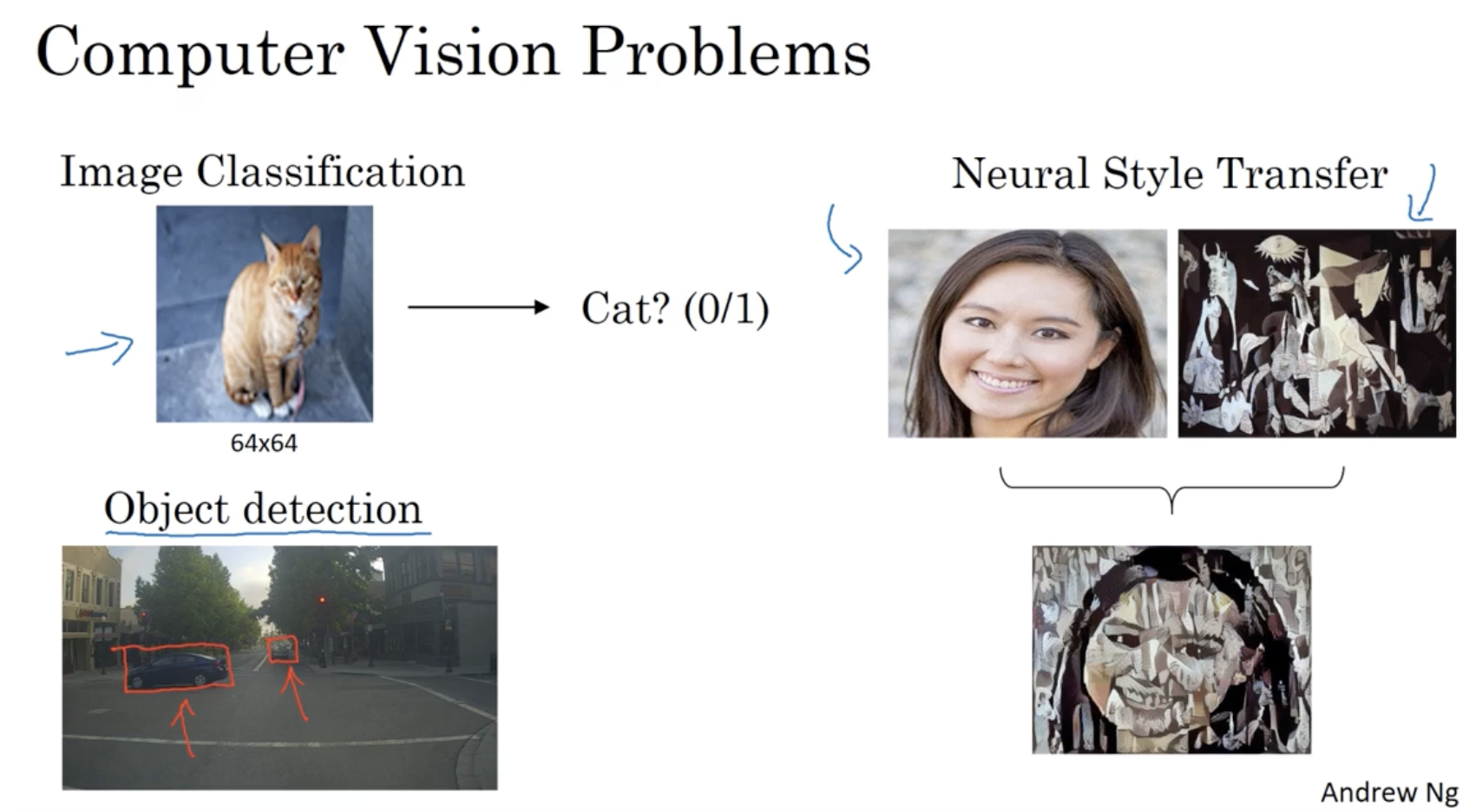
컴퓨터 비전 연구의 예시는 아래와 같다.
- 이미지 분류
- 객체 탐지
- 스타일 변환
- ...
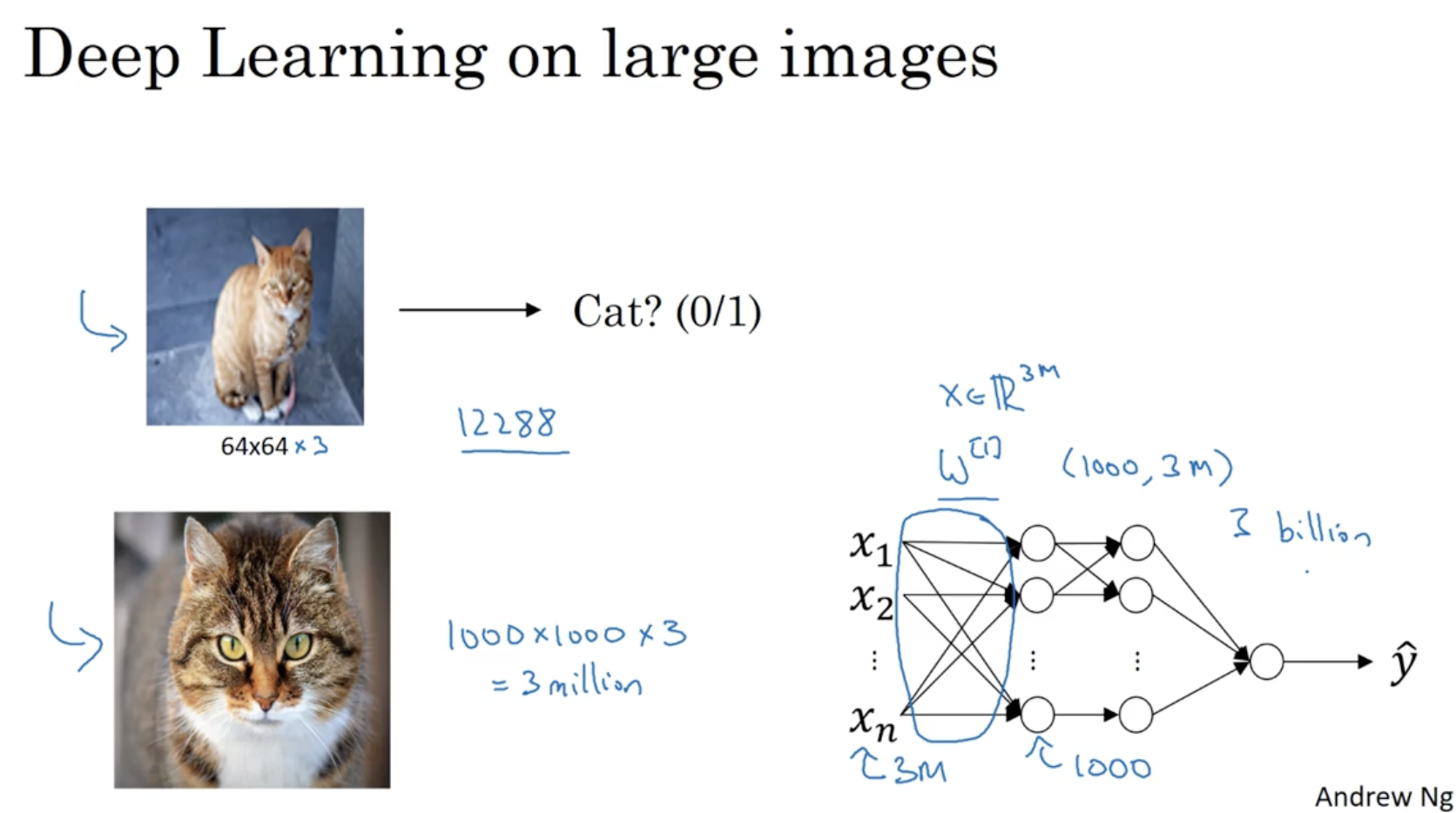
하지만 일반적인 딥러닝 모델을 가지고 이미지 데이터를 처리할 때 아래와 같은 제약이 존재한다.
- 작은 사이즈의 이미지 데이터에 대해서는 괜찮다. 예를 들어, 64 x 64 이미지에 대해서는 64x64x3 개의 feature가 존재하고, 이 된다. feature의 차원이 크긴 하지만 나름대로 계산할 수는 있다.
- 하지만 이미지 사이즈가 1000 x 1000이라면 얘기가 다르다. 이 경우, feature의 차원은 3M이 되며, 이를 학습하는 파라미터 의 차원은 이 되어, 총 3B개의 파라미터가 나올 것이다. (메모리 상 한계가 있을 것이다.)
- 따라서 이를 위해 Convolutional Neural Networks (CNN) 모델이 나오게 된다.
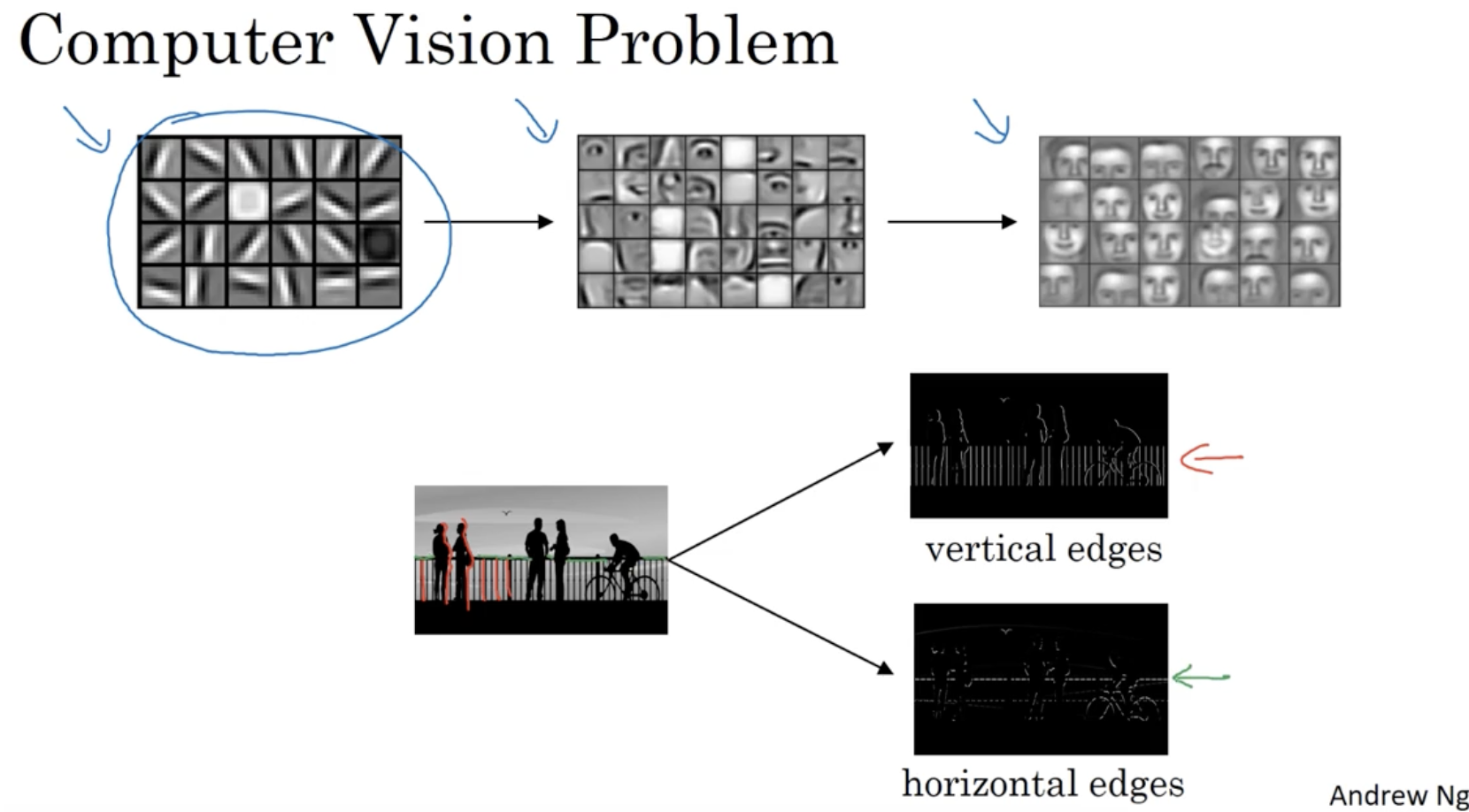
따라서 고차원 데이터에 대해서 처리할 때, 먼저 edge detection 을 적용해줘야 한다.
- 예를 들어 이미지에서 vertical(수직) edge와 horizontal(수평) edge를 추출한다.
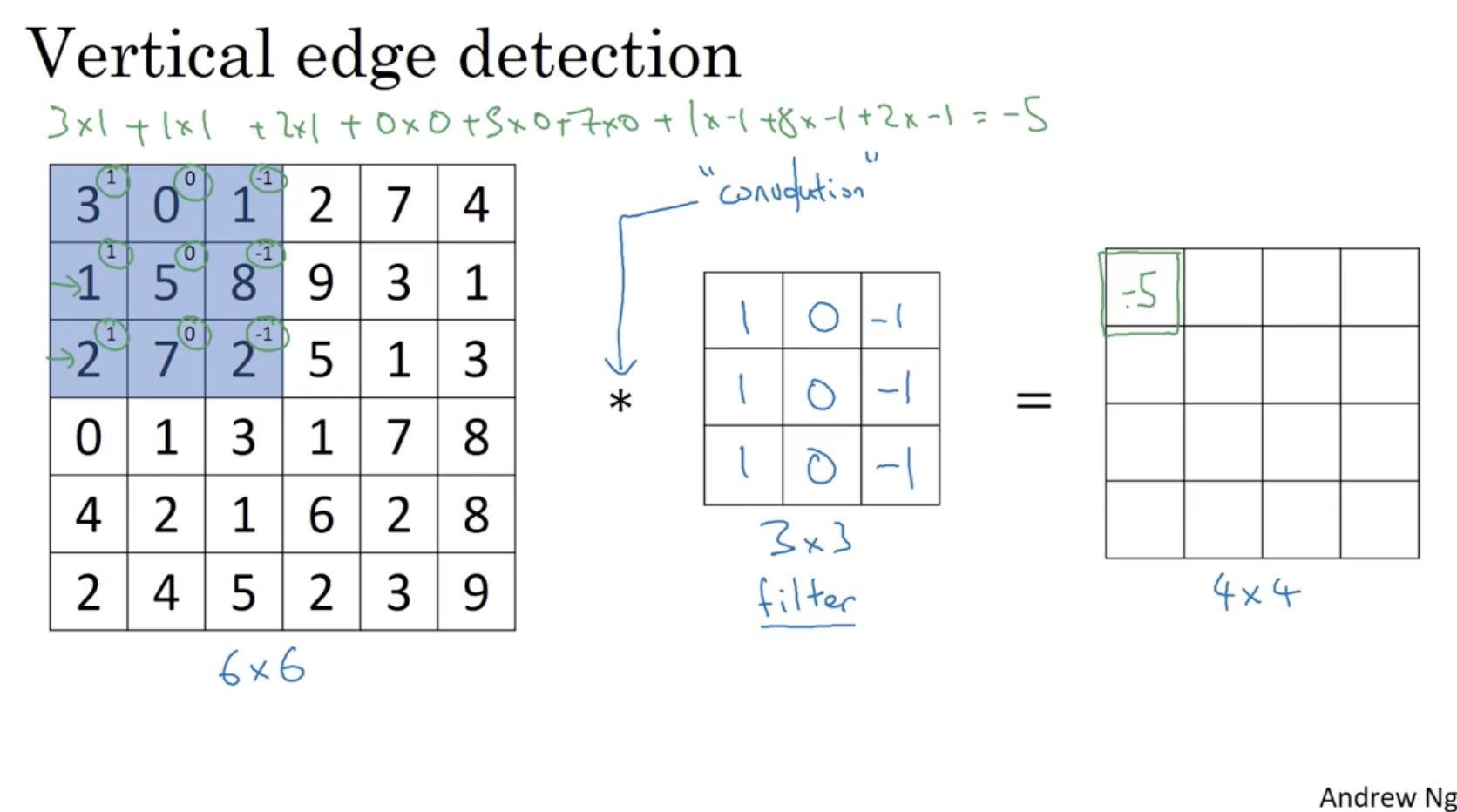
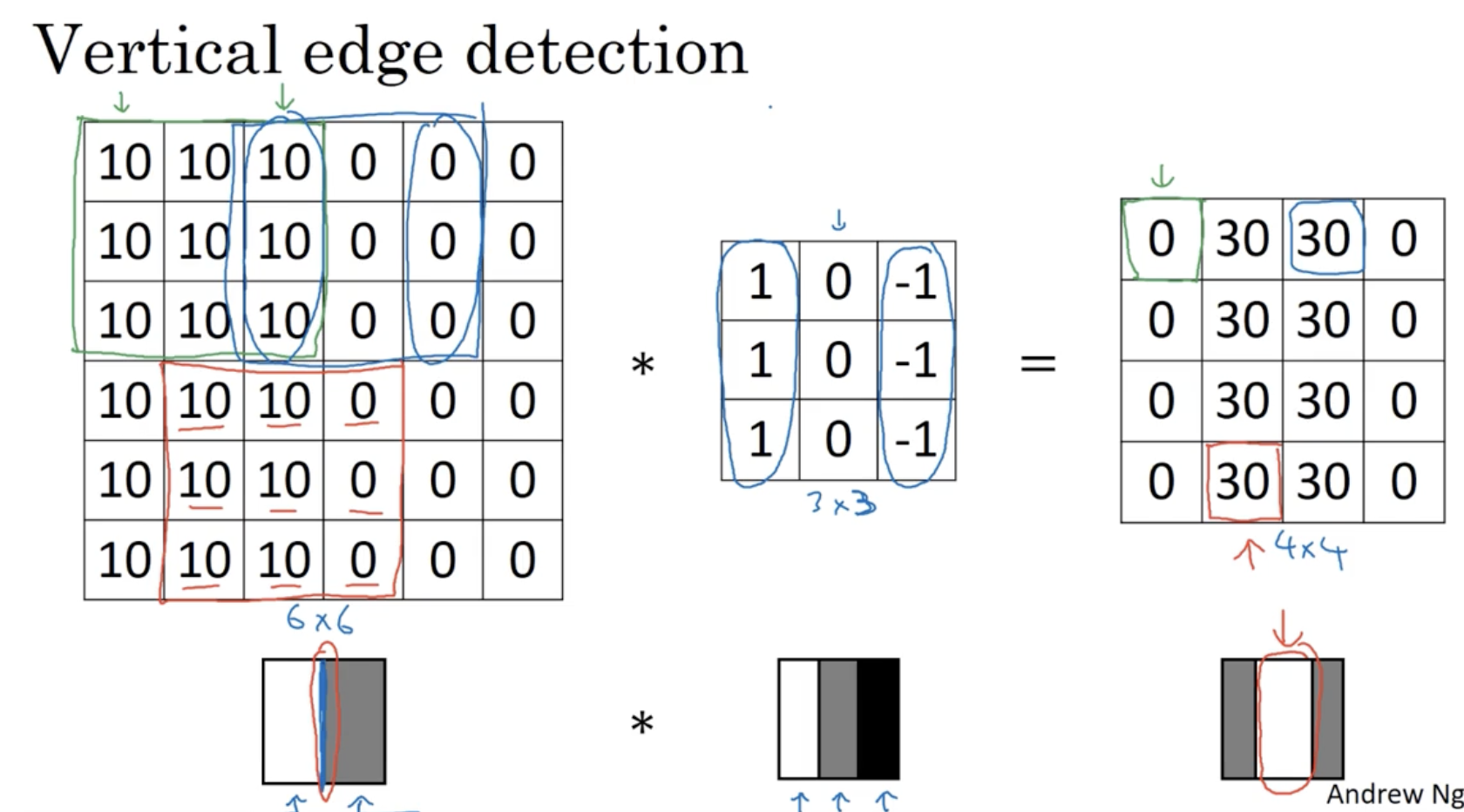
vertical edge detection의 방법은 아래와 같다.
- 좌측처럼 gray scale(no RGB(), only Bright or Dark() 이미지 데이터가 주어졌다고 해보자.
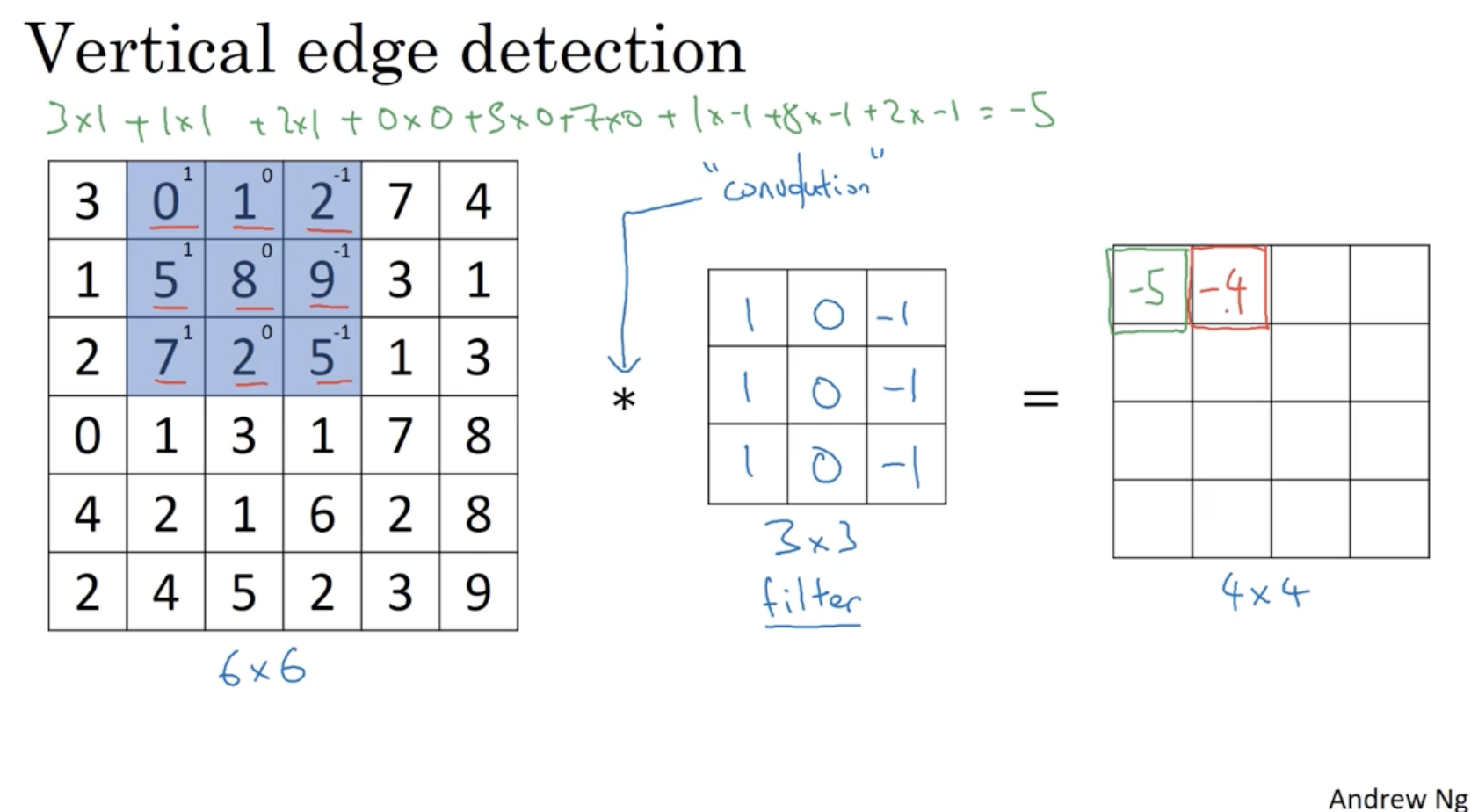
- 여기에 중간과 같이 좌측 열은 1, 중간 열은 0, 우측 열은 -1인 filter(kernel)를 적용하여 이미지 데이터와 convolution 연산을 수행한다. (like element-wise product)
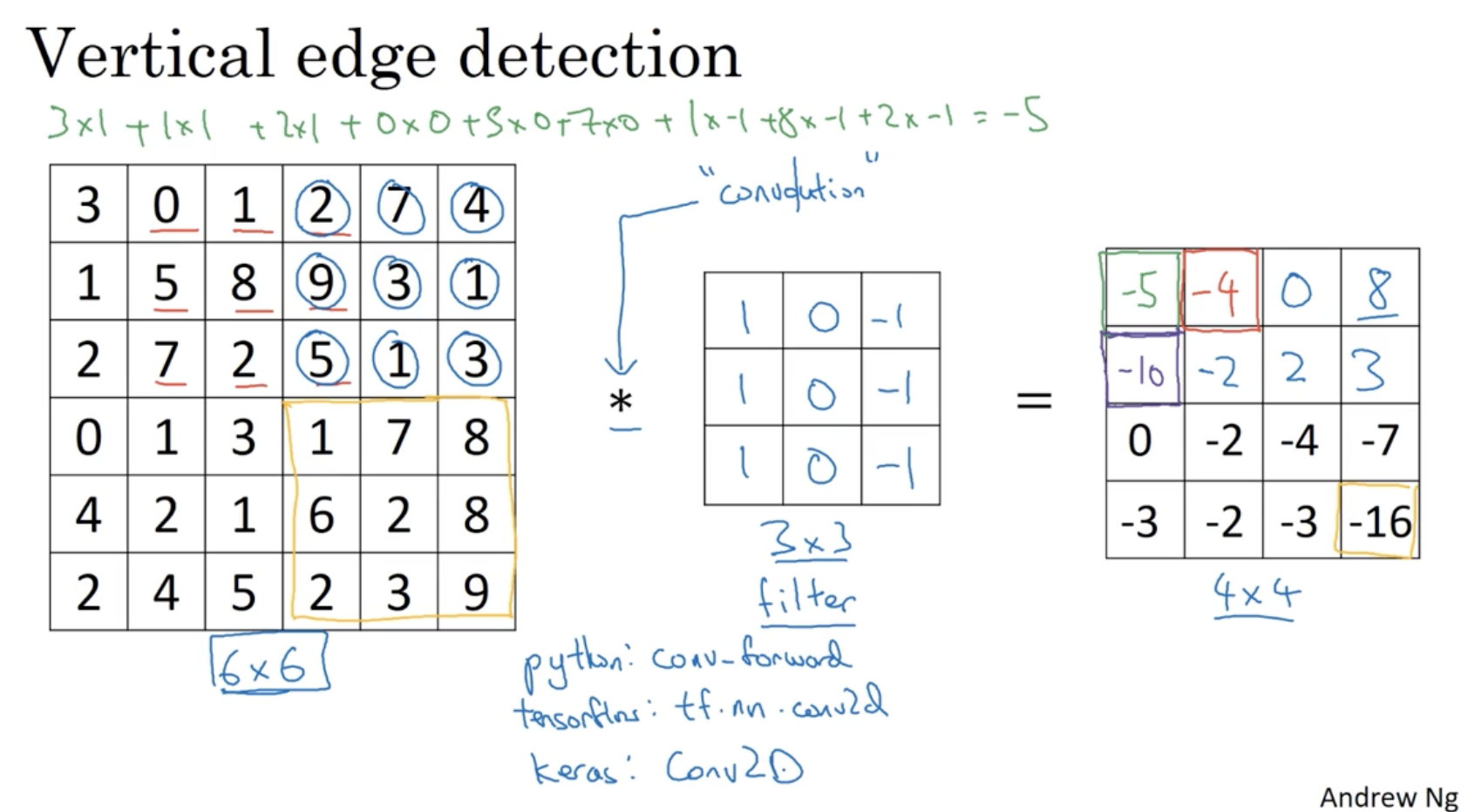
- 그러면 우측과 같이 행렬이 만들어질 것이고, 이 행렬이 기존의 이미지의 vertical edge 정보를 포함하고 있을 것이다.
- 라이브러리 및 프레임워크마다 이를 구현하는 코드명이 약간씩 다르다.
- python :
conv_forward- tensorflow :
tf.nn.conv2d- keras :
Conv2D
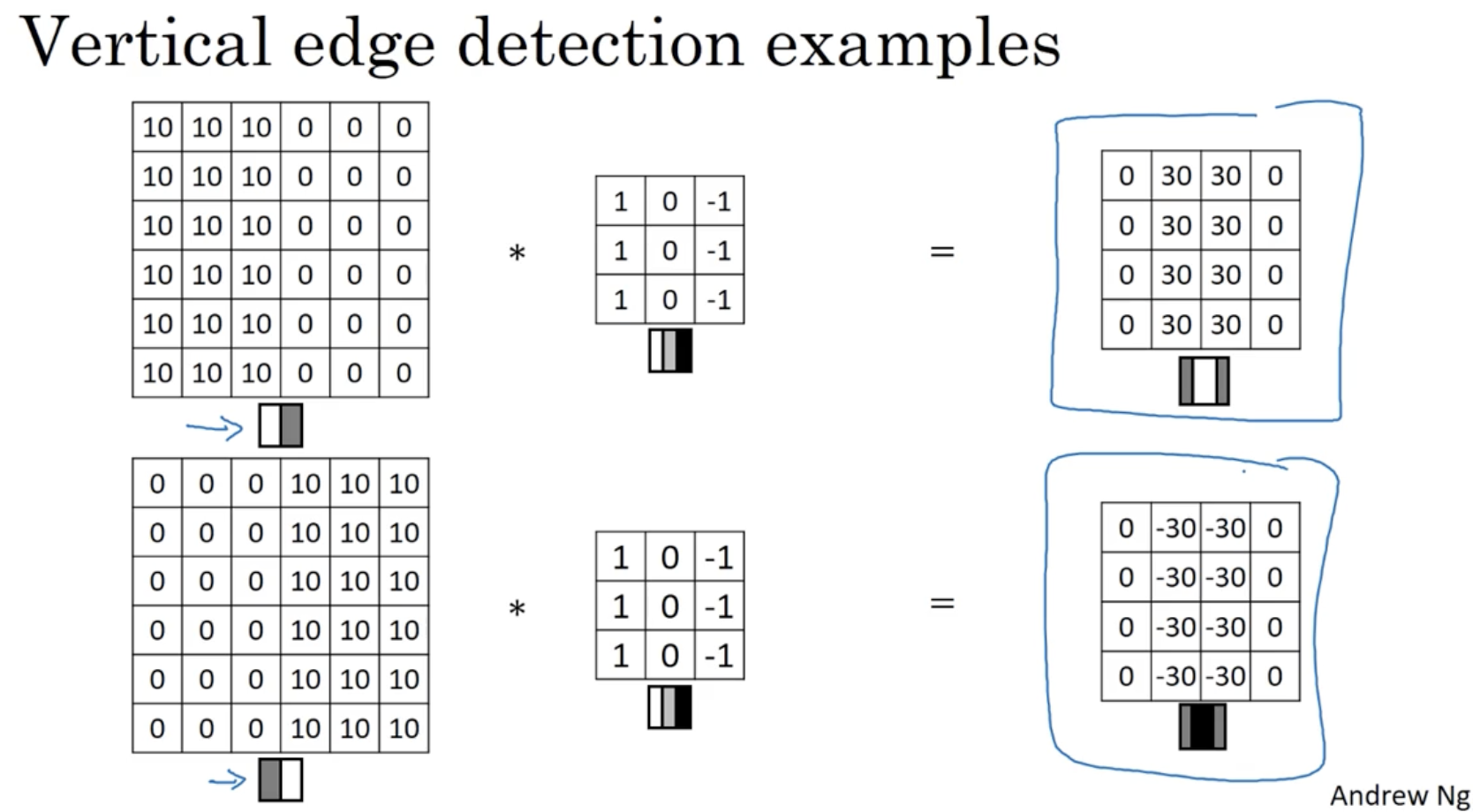
아래 예시를 보자.
- 좌측은 흰/회 의 gray scale 데이터이다. 이 데이터의 vertical edge detection를 해보자.
- 중간과 같이 filter가 존재한다. 이 필터는 백/회/검 을 의미한다.
- 그리고 filter convolution를 적용하면 우측과 같이 edge에 해당하는 원소들의 값을 구할 수가 있을 것이다.
그러면 데이터를 반전시킨 후 필터를 적용하면 결과는 어떻게 나올까?
- 아래와 같이 edge에 해당하는 원소값들의 절댓값에는 변화가 없다.
- 따라서 만약 밝거나 어둡거나에 신경을 쓰지 않는다면 그저 절댓값을 취해도 괜찮을 것이다.
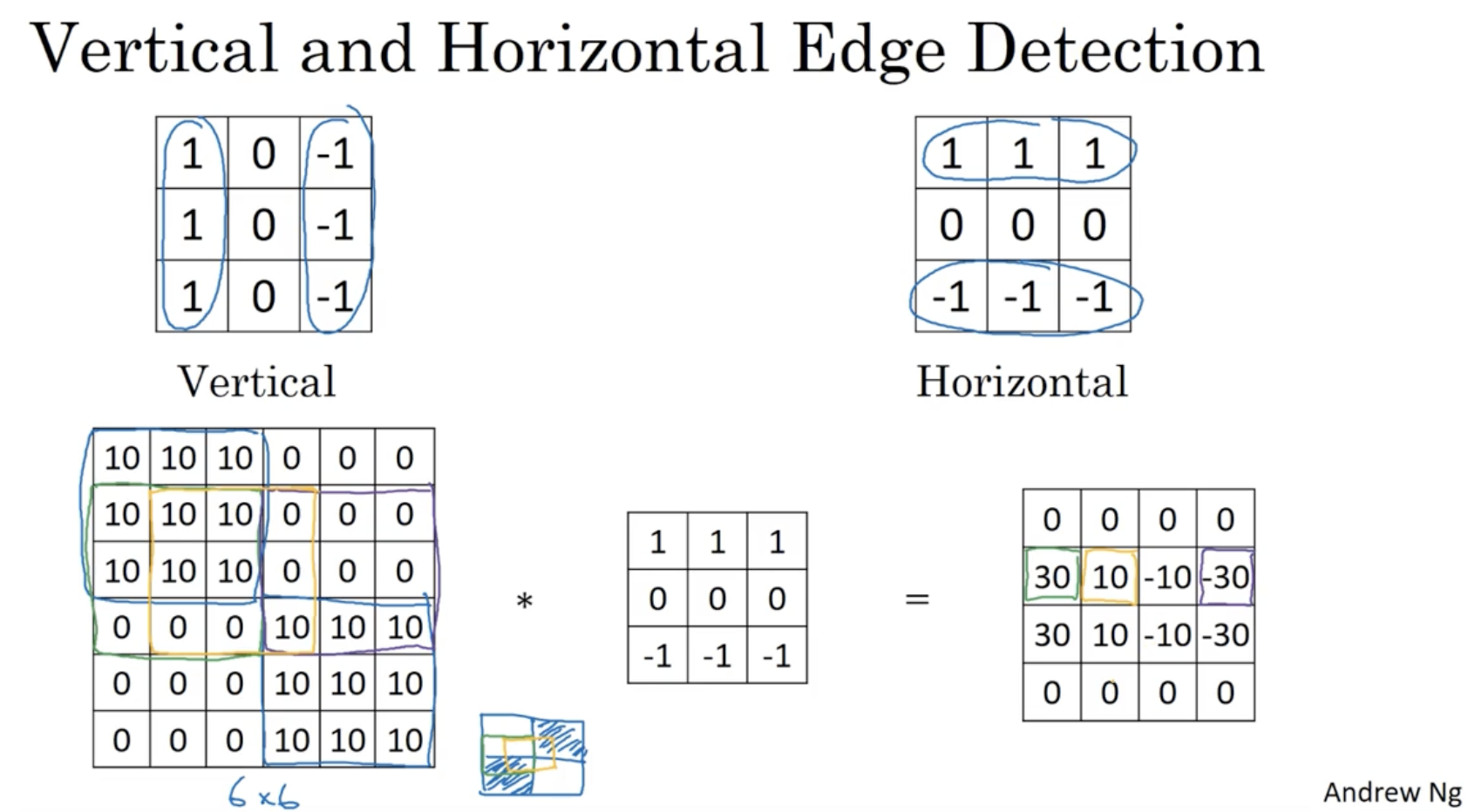
그리고 vertical(수직) edge detection이 아닌 horizontal(수평) edge detection도 방법은 같다.
- 아래와 같이 필터를 수평적으로 분리해서 적용하면 (행을 구분하여 적용하면) horizontal edge detection이 된다.
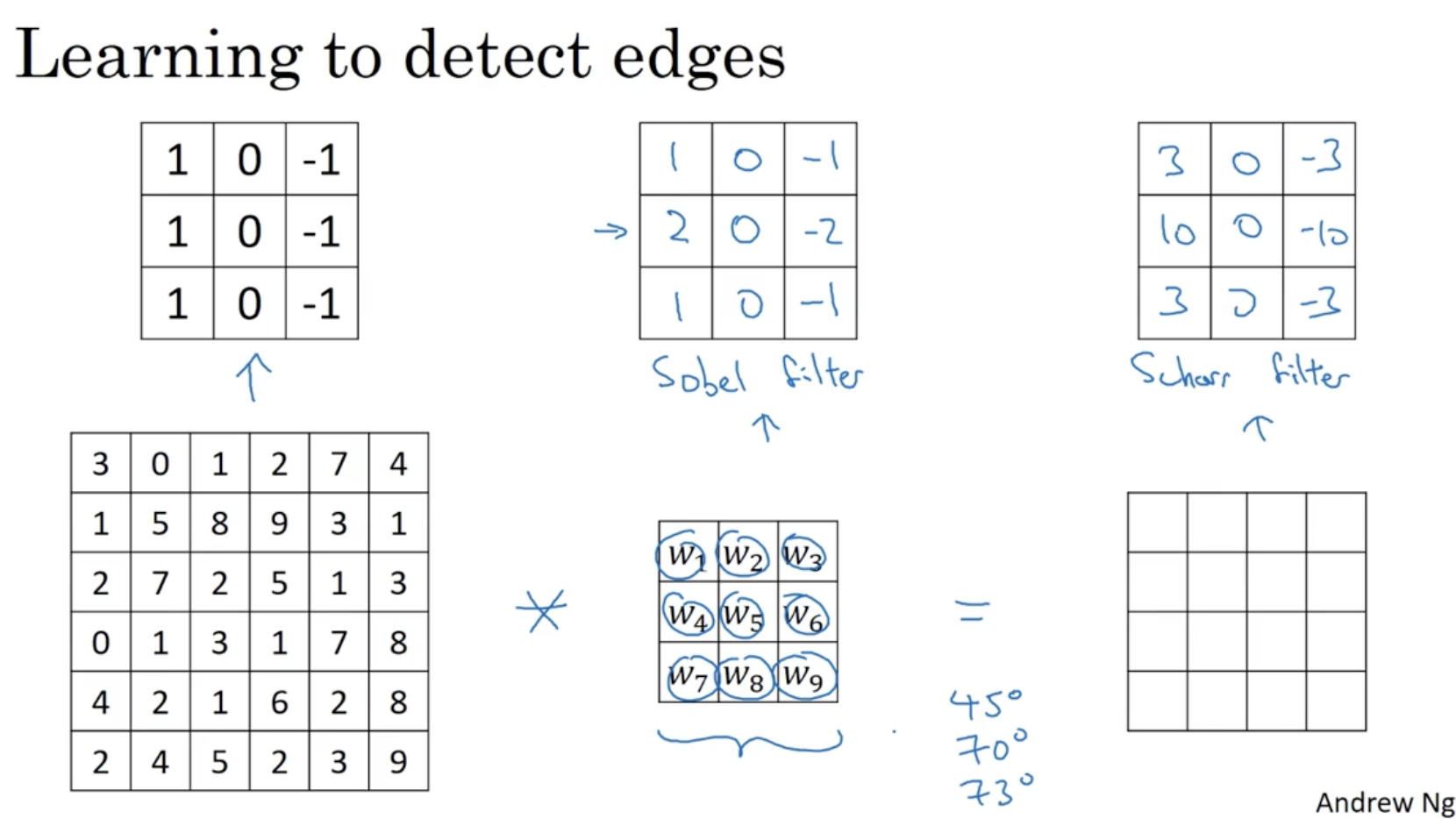
그리고 edge detection의 filter를 학습시킬 수도 있다.
- 아래와 같이 고정적인 필터값 sobel filter or scharr filter를 적용시켜도 되지만,
- filter의 값을 w 파라미터로 두어 이를 원하는 대로 학습시킬 수도 있다. (예를 들어 45도 기준의 대각선 위주의 edge detection, 70도 기준의 ... 등)
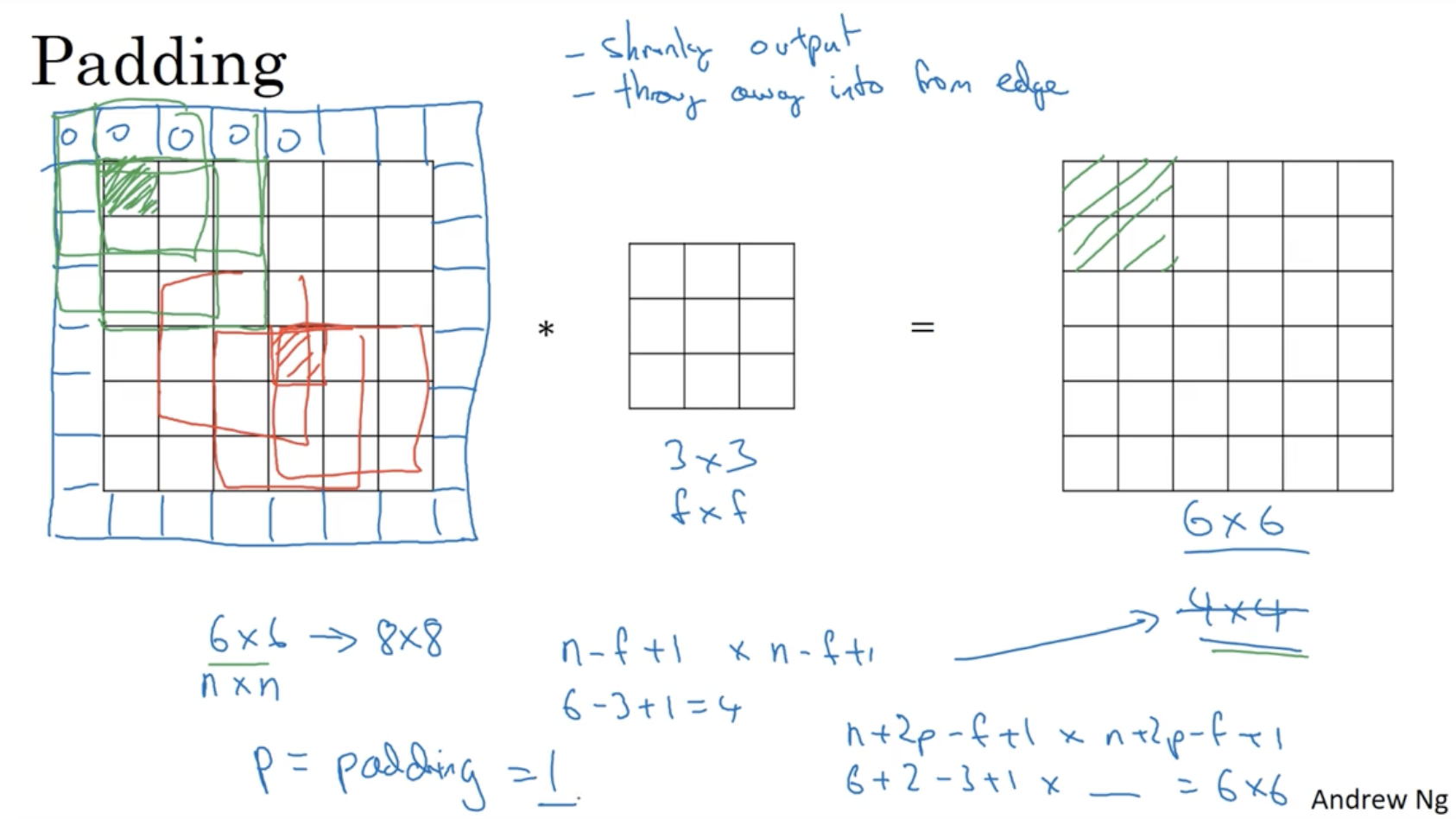
다음으로 padding 이라는 개념을 알아보자.
- 이전처럼 original 이미지에 필터를 convolution하면 그 결과가 로 나온다.
- 이 경우 아래 좌측 행렬의 초록색 원소의 값은 빨간색 원소의 값보다 반영률이 적을 것이다.
- 또한 입력 이미지의 크기가 달라진다는 점도 존재한다.
- 따라서 이를 방지하기 위해 padding 이라는 개념을 도입하였다.
- padding은 다음과 같다.
- 아래 좌측 행렬과 같이 사이즈의 padding을 추가한다. (이 예시에서는 원소의 값을 0으로 채운다.)
- 그러고 나서 padding이 적용된 이미지에 필터의 convolution 연산을 하면 우측과 같이 행렬이 나올 것이다.
- 즉, 기존 이미지의 크기를 , filter의 크기를 , padding의 사이즈를 라고 했을 때,
- padding이 적용되지 않을 경우 출력 행렬은 크기를 갖지만,
- padding을 적용할 경우, 출력 행렬은 크기를 가질 것이다.
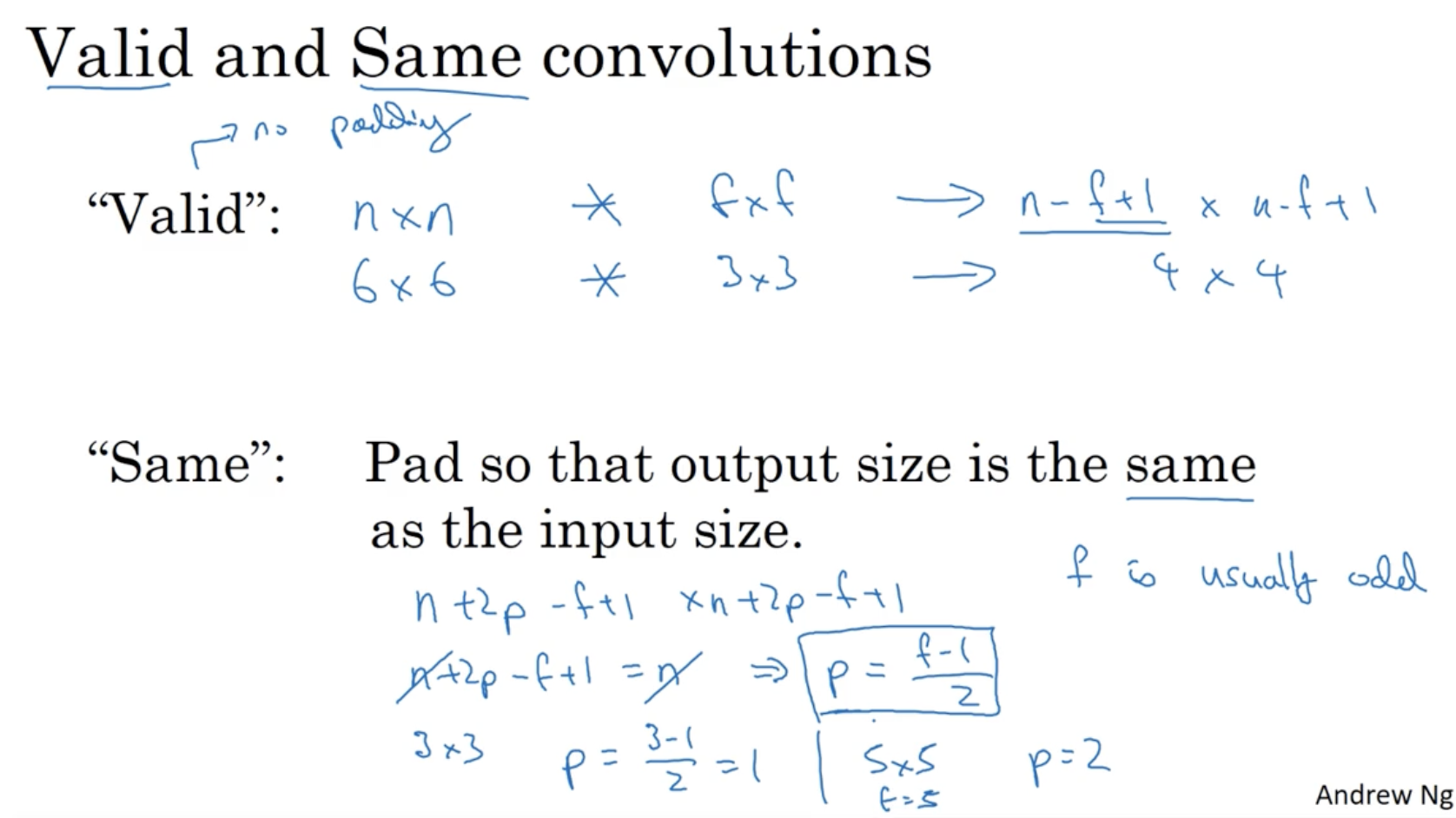
따라서 padding의 유무에 따른 convolution을 정리하면 다음과 같다.
- "Valid" convolution : no padding. output matrix :
- "Same" convolution : with padding. (input matrix의 사이즈 = output matrix의 사이즈)
- input matrix :
- output matrix :
- 따라서 수식을 만족하기 위해서
- 이 된다.
- 그리고 보통 는 홀수값을 갖는다.
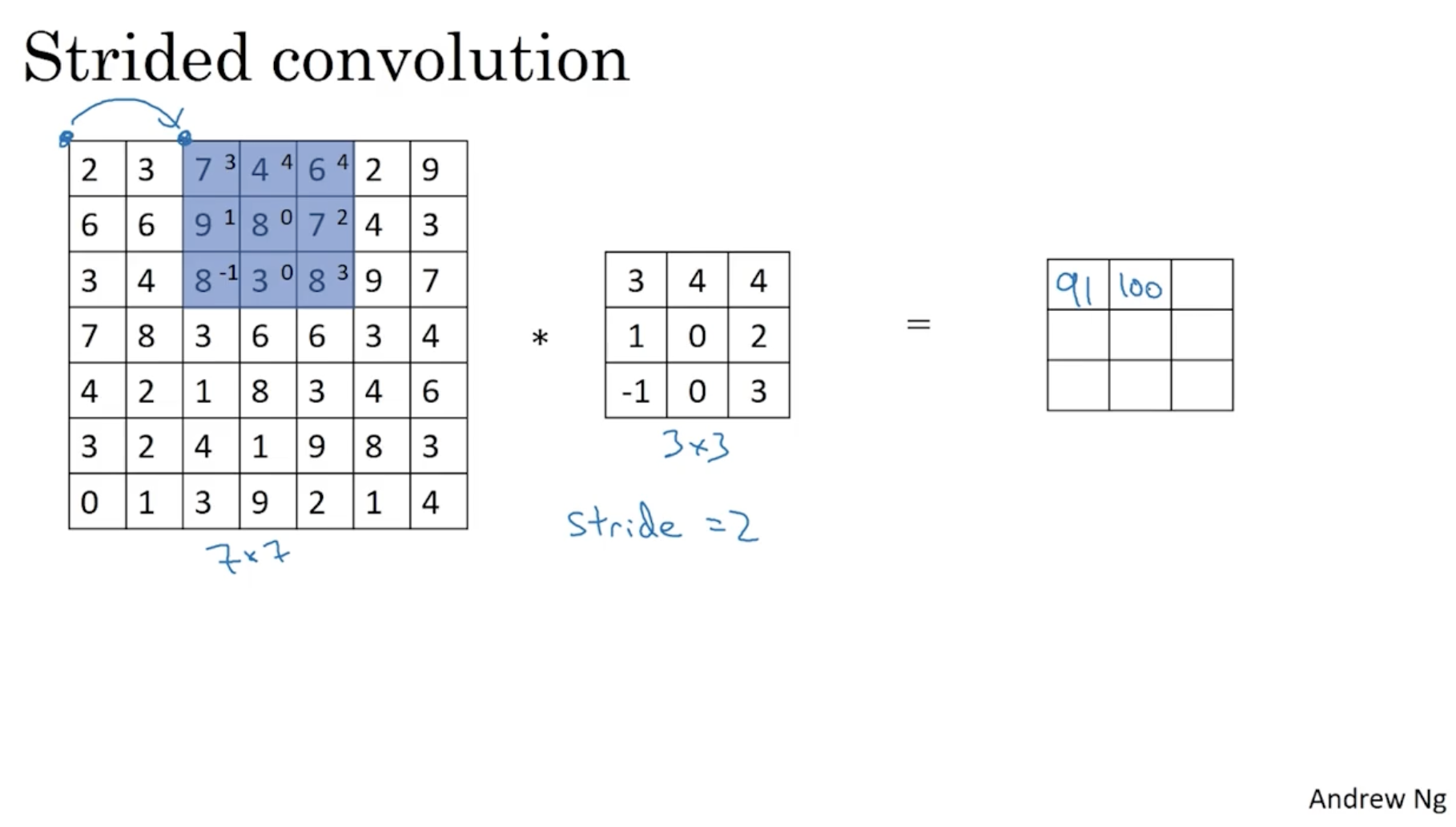
다음으로 Stride의 개념에 대해서 알아보자.
- 아래는 에 대한 예시이다.
- 보다시피 이전과 동일하게 convolution 연산을 적용한다. 다만, 다음 위치로 넘어가는 Step의 크기가 2씩 증가한다. (이 경우 stride가 2라고 한다.)
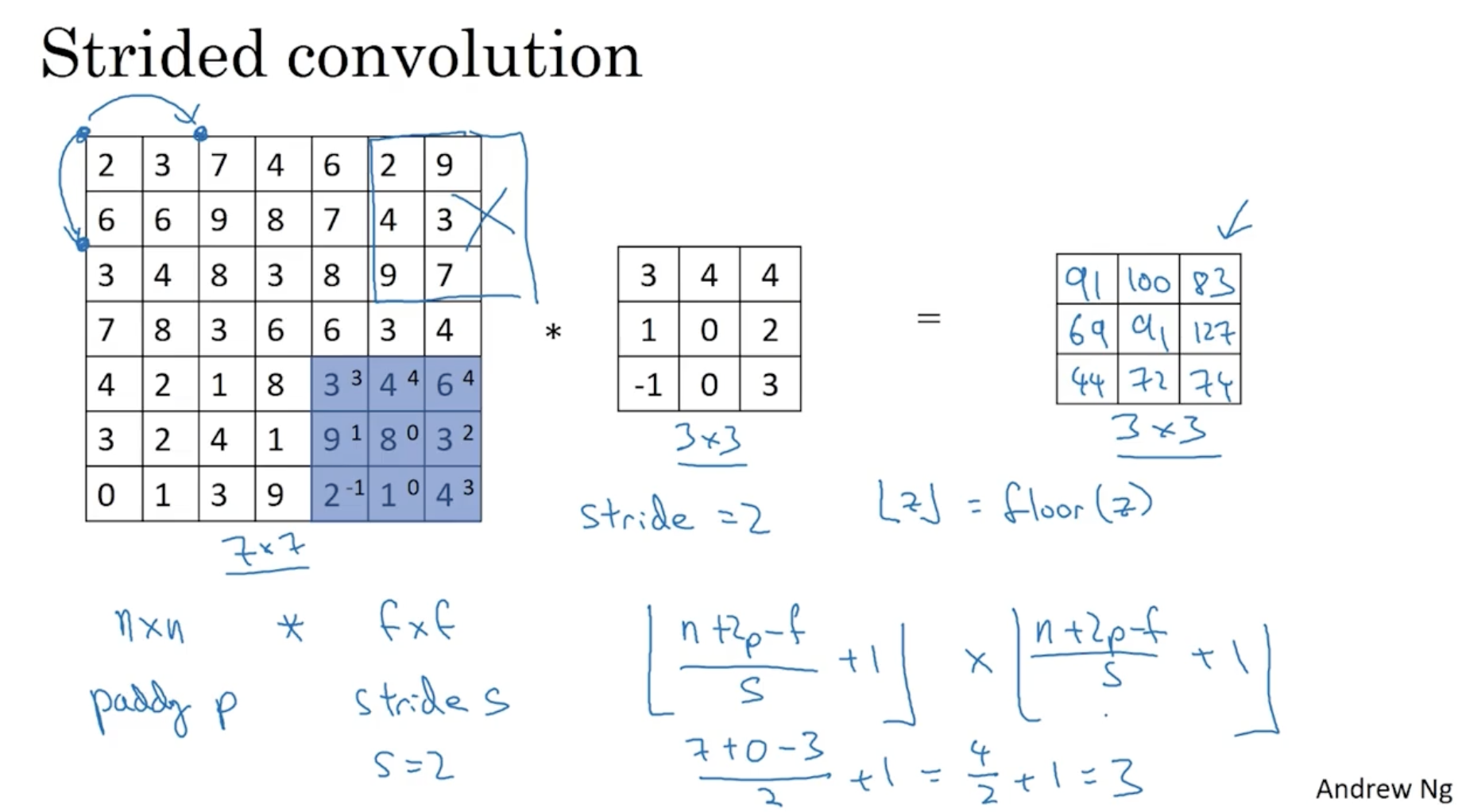
- 따라서 아래와 같이 결과가 나올 것이다.
- stride 크기 가 적용될 경우, 기존의 padding 크기 와 더불어 output matrix의 크기는 다음과 같이 정해질 것이다.
- 즉, 반내림 기호 가 적용되어 위 그림과 같이 만약 입력 행렬의 크기가 이었어도 마지막은 적용이 되지 않았을 것이다.

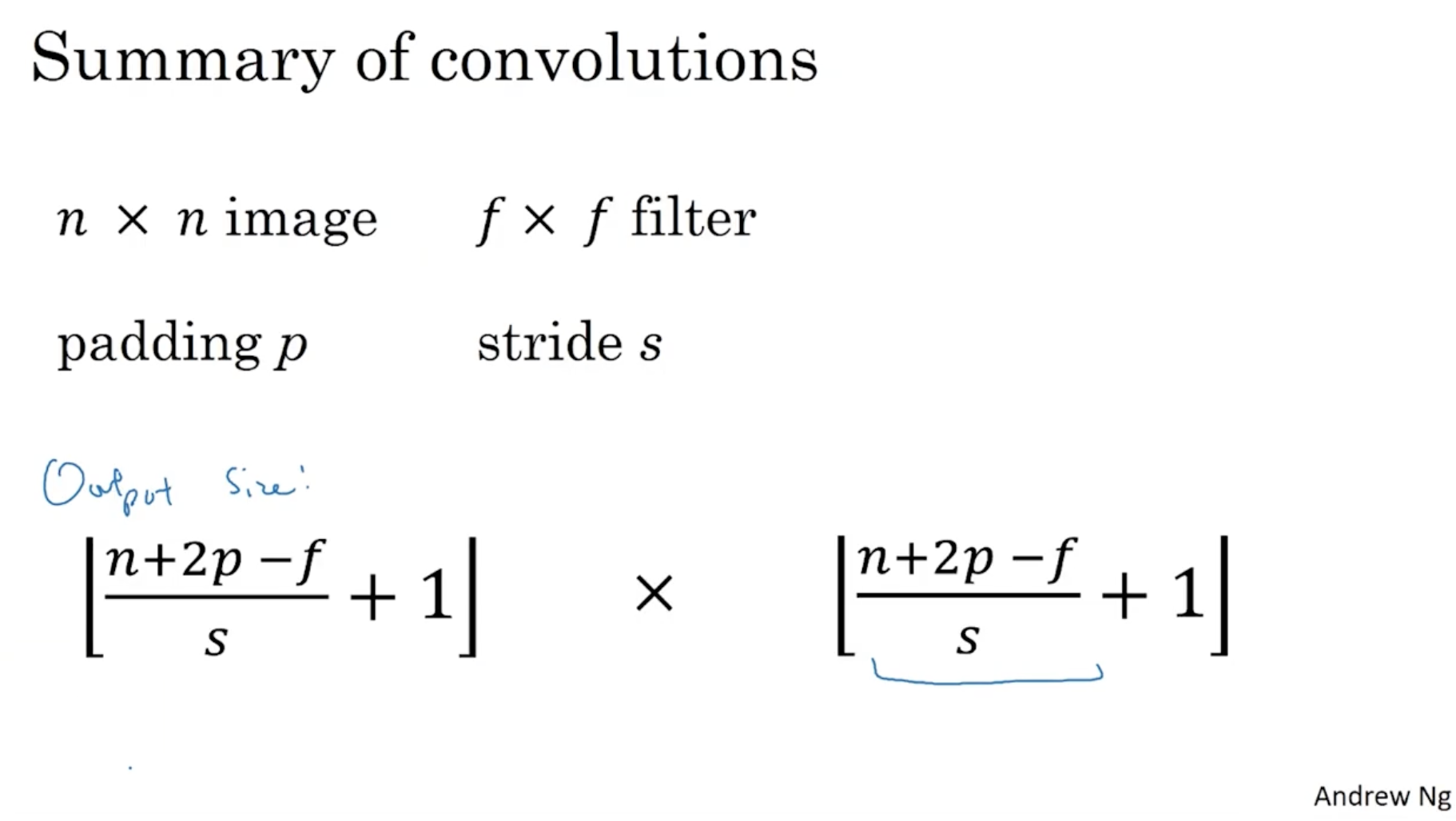
따라서 convolution 연산에서의 Output matrix의 크기를 요약하면 아래와 같다.
- input 이미지 크기 :
- filter 크기 :
- padding 사이즈 :
- stride 사이즈 :
- 위 정보가 주어졌을 때 output matrix의 크기는 다음과 같다.
- output matrix :
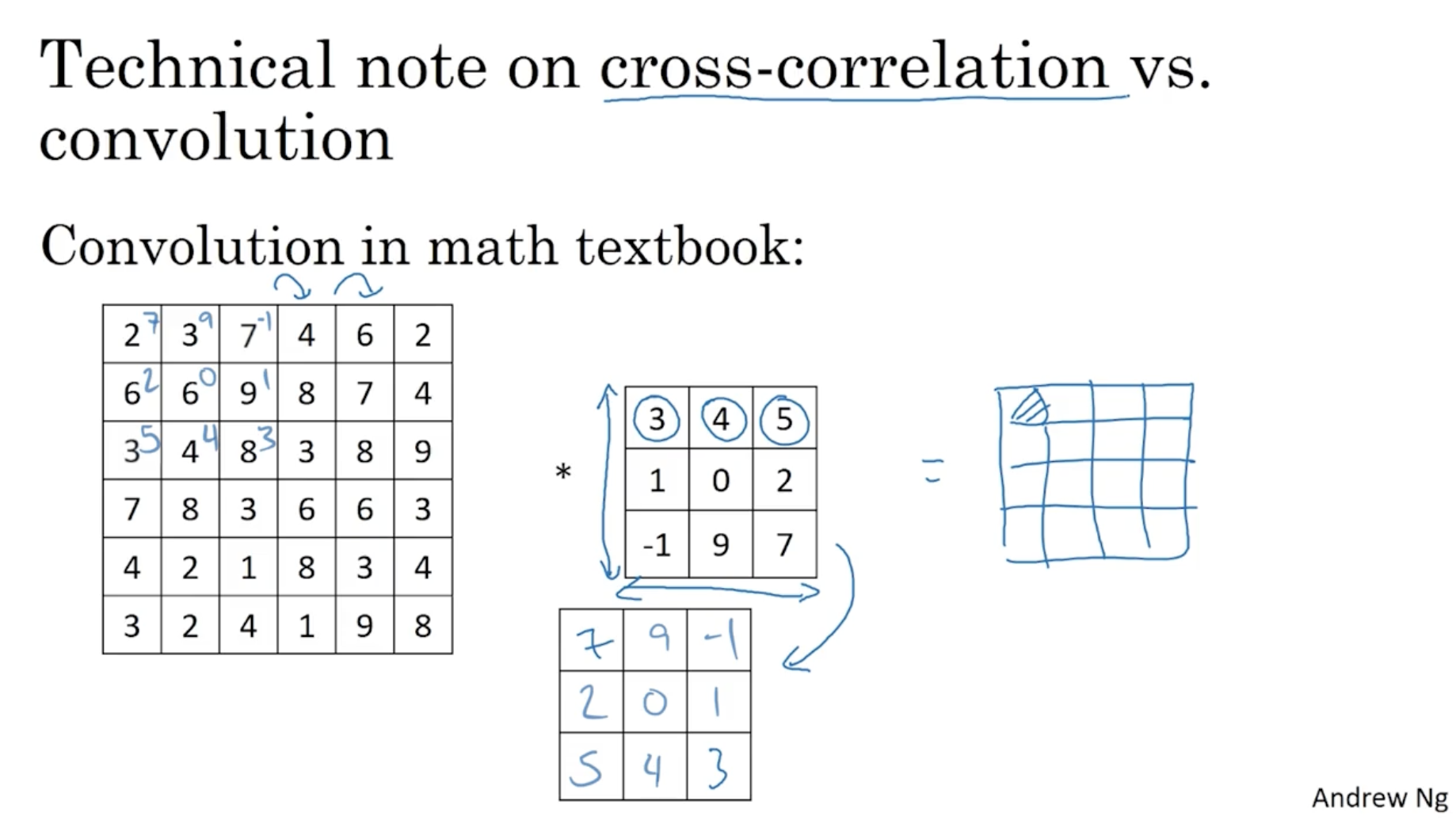
아래는 참고용으로, 일반적인 수학 교과서에서의 convolution은 아래와 같이 상하좌우가 반전된 필터로 convolution을 적용한다는 내용이다. (하지만 딥러닝에서는 그렇게 중요한 고려 요소가 아니다. 그냥 이전처럼 진행하면 된다.)
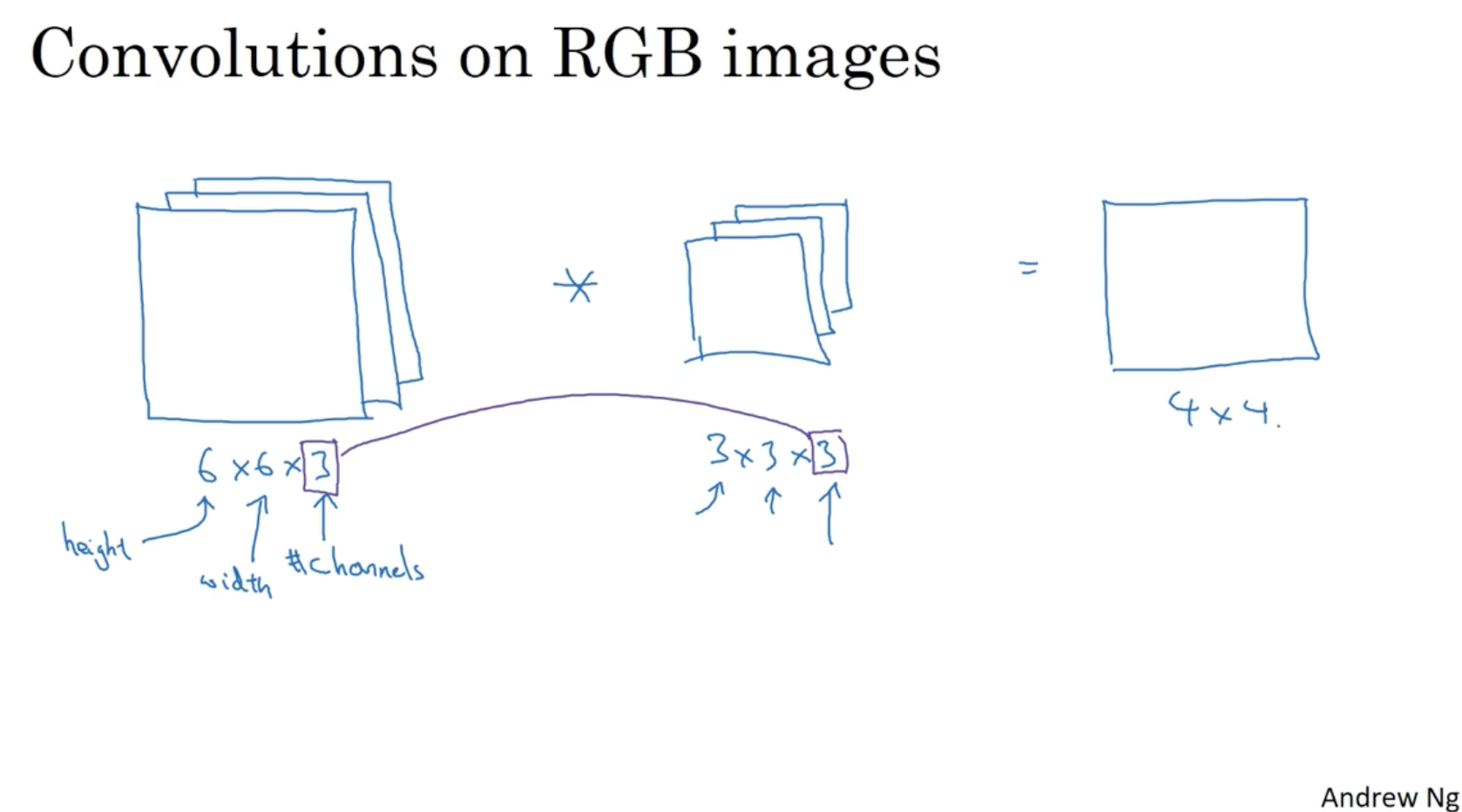
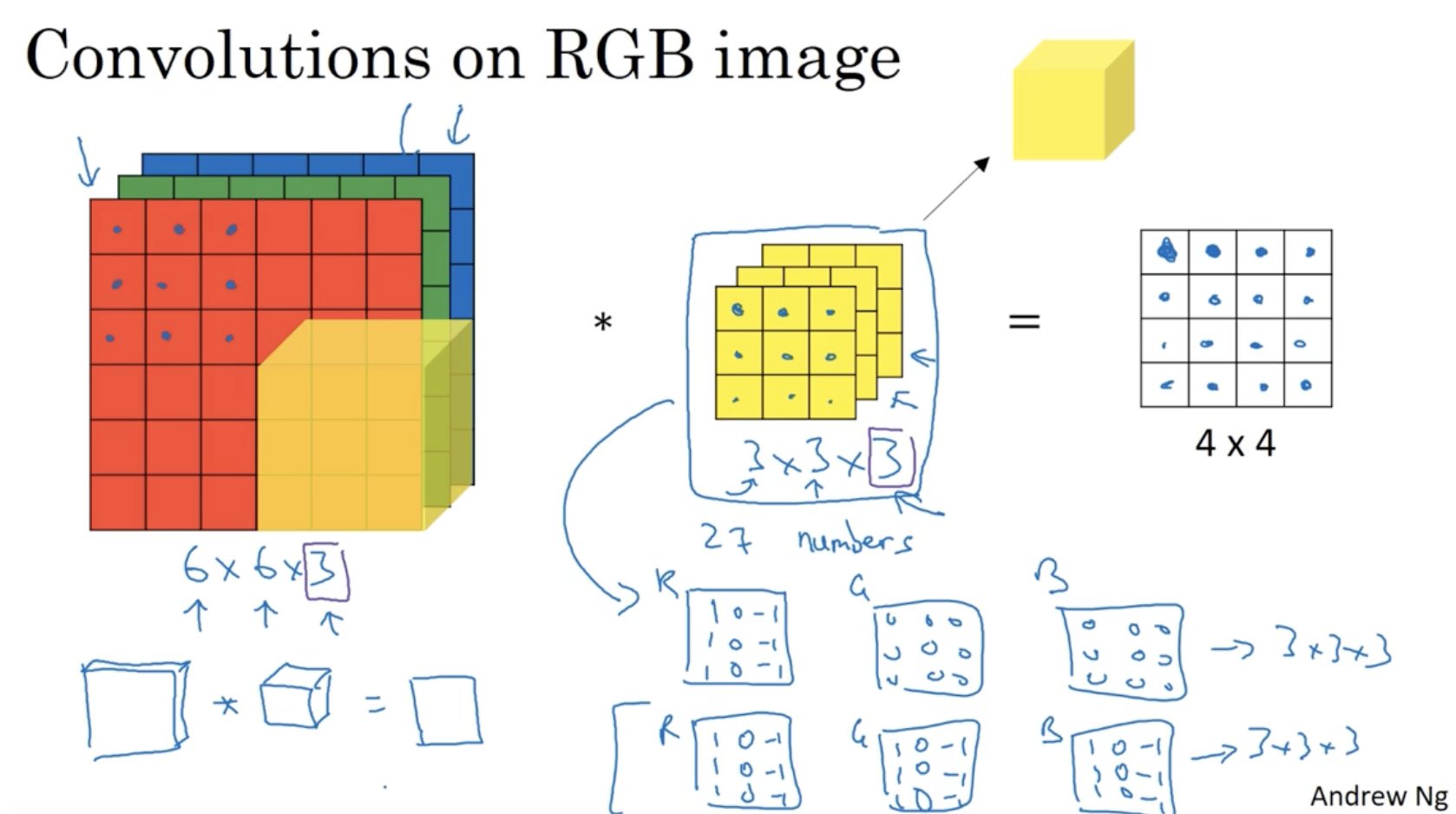
이전까지는 gray scale 이미지에 대한 convolution을 알아보았다. 그렇다면 RGB 이미지에는 어떻게 convolution을 적용할 수 있을까? 아래를 보자.
- 비교적 방법은 간단하다. 여러 개의 채널(RGB)에 대한 각각의 filter를 적용하면 된다.
- 그리고 각 convolution 값을 연산하여 하나로 묶어주면 된다.
- 아래처럼 입력 이미지에 대해서 convolution 연산을 해야할 경우, filter는 으로 만들어준다.
- 그리고 연산을 진행하여 , 크기의 output matrix를 구할 수 있다.
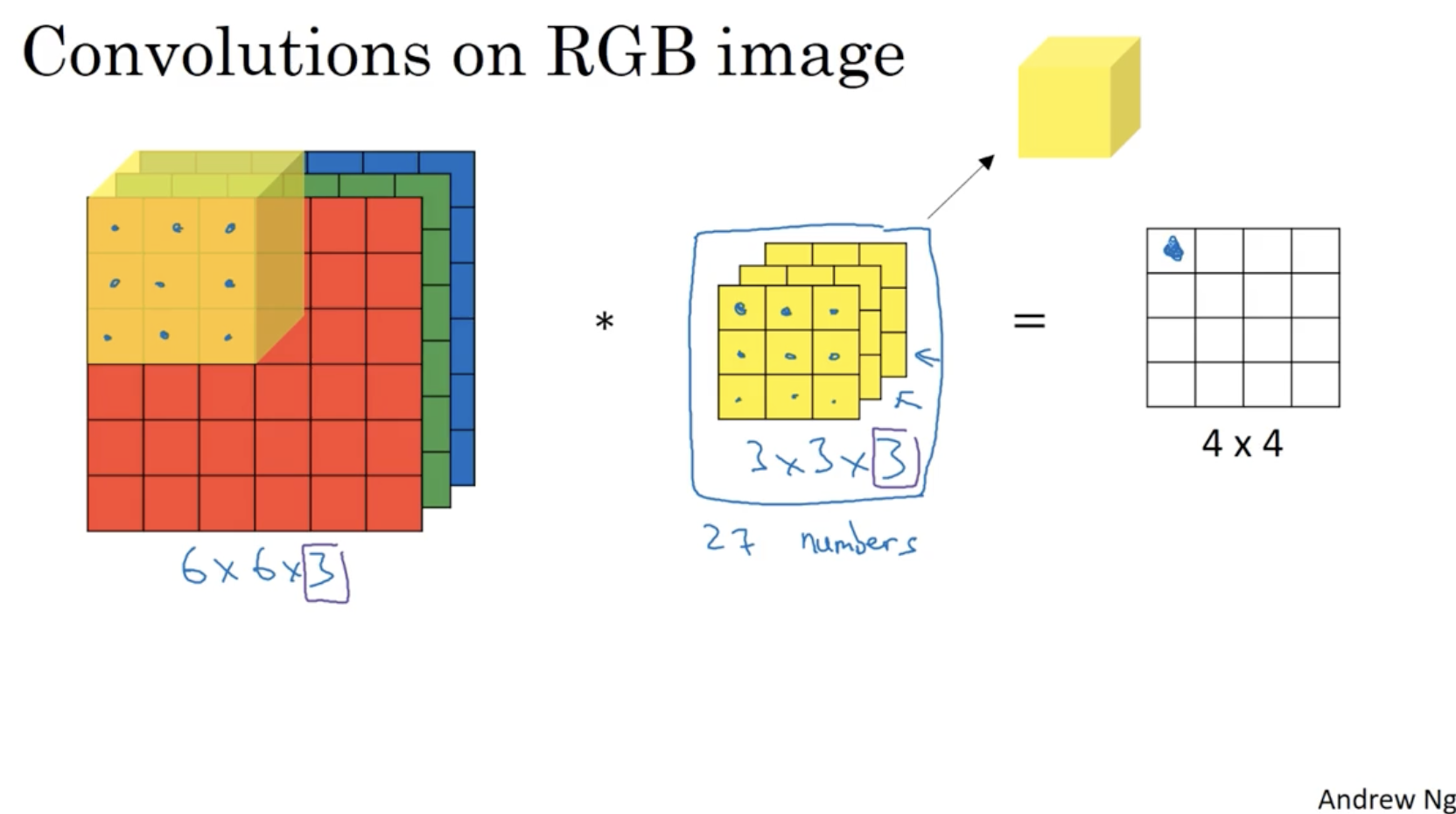
아래는 좀더 직관적인 이미지로 RGB 이미지에 대한 convolution을 적용한 예시를 보여준다.
- 만약 위에서 filter가 처럼 적용된다면 이를 통해 나온 output matrix는 Red color의 (vertical) edge만을 나타낼 것이다.
- 반면에 처럼 적용된다면 output matrix는 모든 color의 (vertical) edge detection을 의미할 것이다.
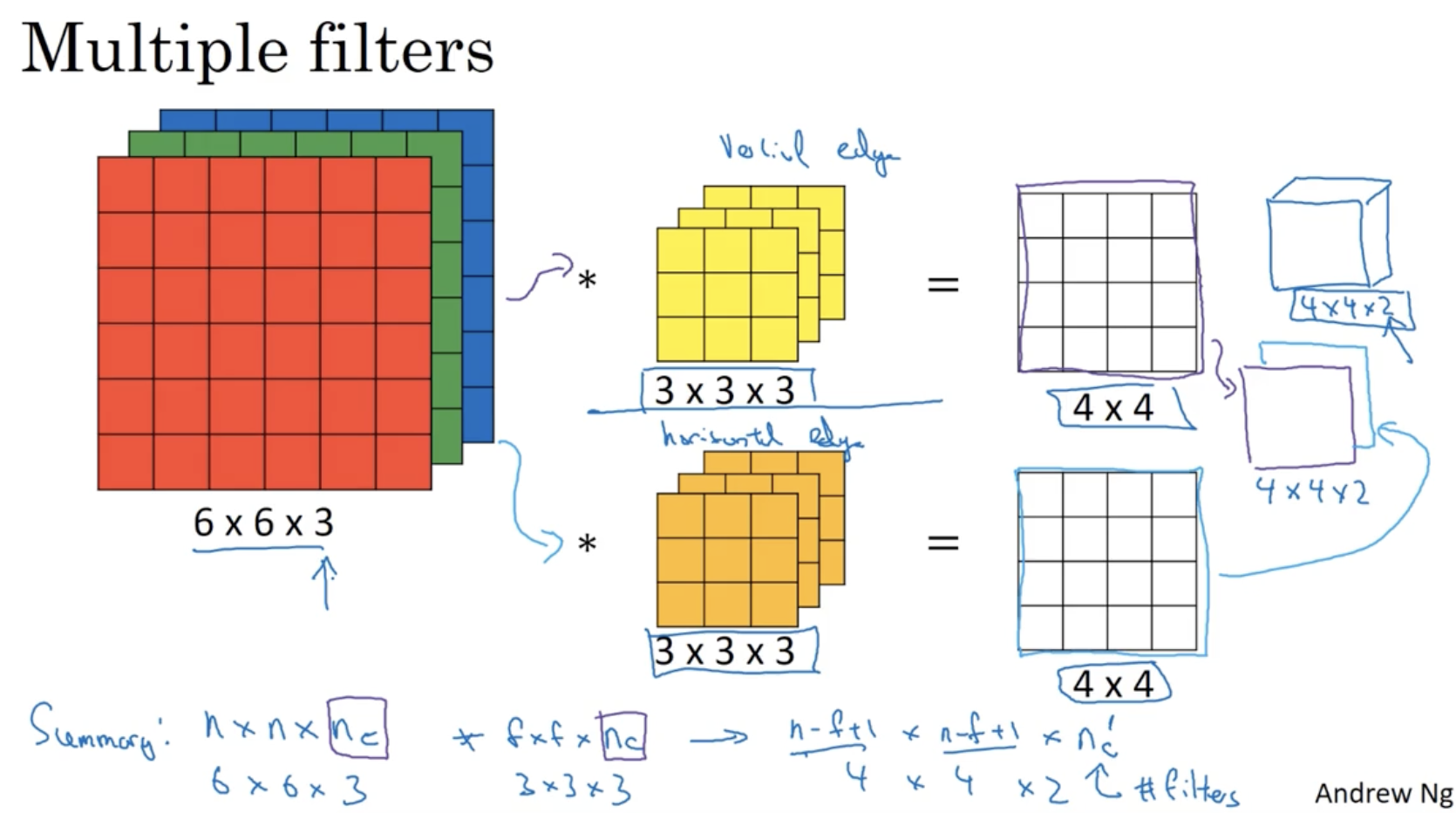
또한, vertical edge와 horizontal edge detection을 합칠 수도 있다. 아래 예시를 보자.
- RGB 이미지에 대한 필터는 크게 두 종류로 나뉜다. (vertical and horizontal)
- 다음으로 필터는 RGB에 대해서 3개의 channel을 갖는다.
- 그리고 vertical과 horizontal edge detection으로 나온 2개의 output matrix를 결합하여 크기의 행렬로 만들어 준다. 이 최종 행렬이 vertical and horizontal edge detection 정보를 갖는 행렬이 된다.
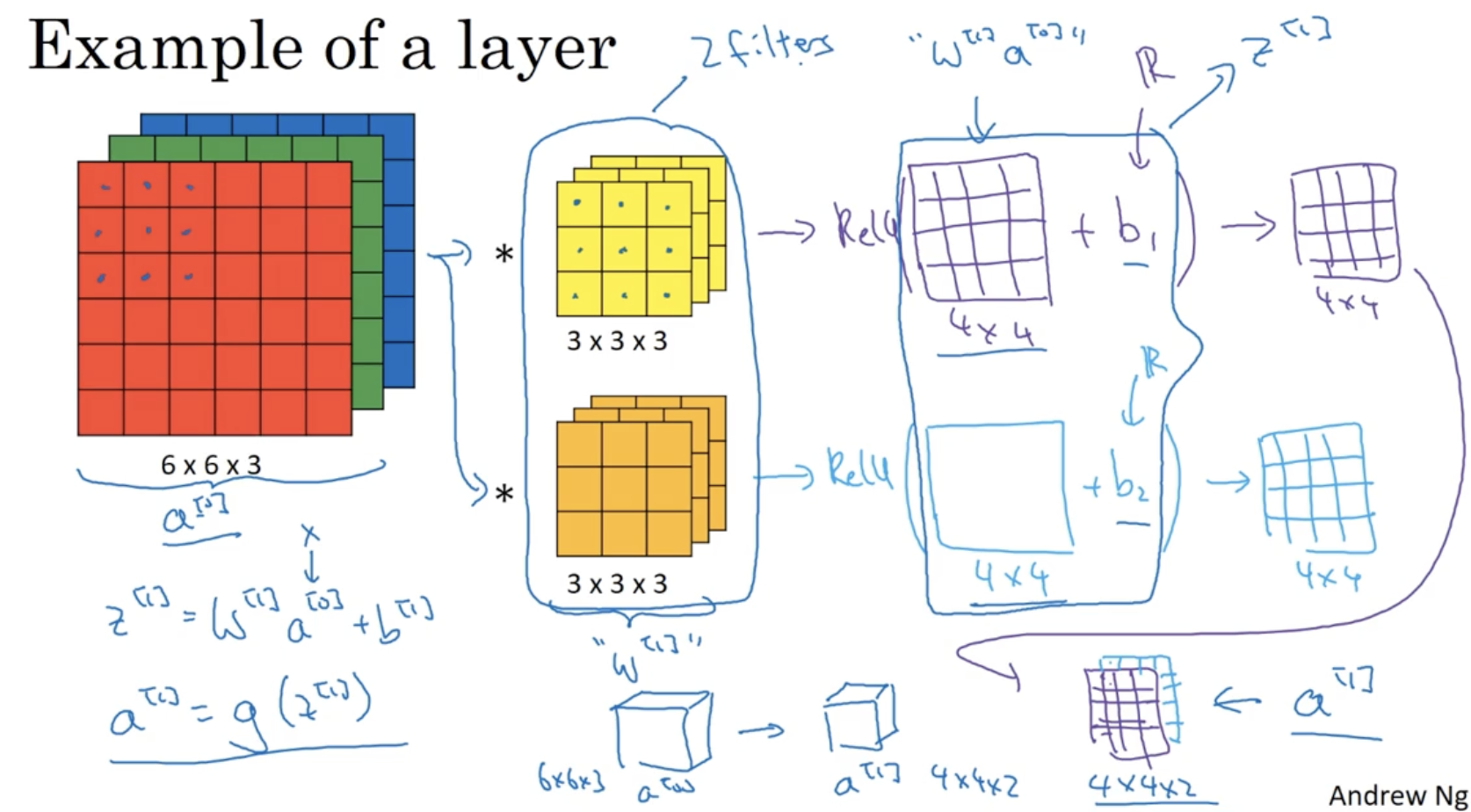
이제 convolution을 neural networks 에 적용해보자. (single layer로 해보자.)
- 아래와 같이 6 x 6 x 3 입력 데이터를 2개의 3 x 3 x 3 필터로 convolution을 한다고 해보자.
- 먼저 각 filter의 convolution 연산을 통해 2개의 4 x 4 output matrix를 구한다.
- 각 output matrix에 각각의 bias 를 더하여 준다.
- 그리고 각 output matrix에 ReLU와 같은 activation function을 적용한다.
- 그러면 activation function이 적용된 2개의 matrix가 나올 것이다.
- 이를 neural net.에 적용하면, 에서 은 필터를 의미하고 (정확히는 3x3x3개의 weights 요소들의 행렬을 의미하고), 은 output matrix에 broadcasting이 적용되는 bias를 의미한다.
- 그 다음 마찬가지로 activation function이 broadcasting 방식으로 적용될 것이고,
- activation function이 적용되어 나온 결과가 이 될 것이다.
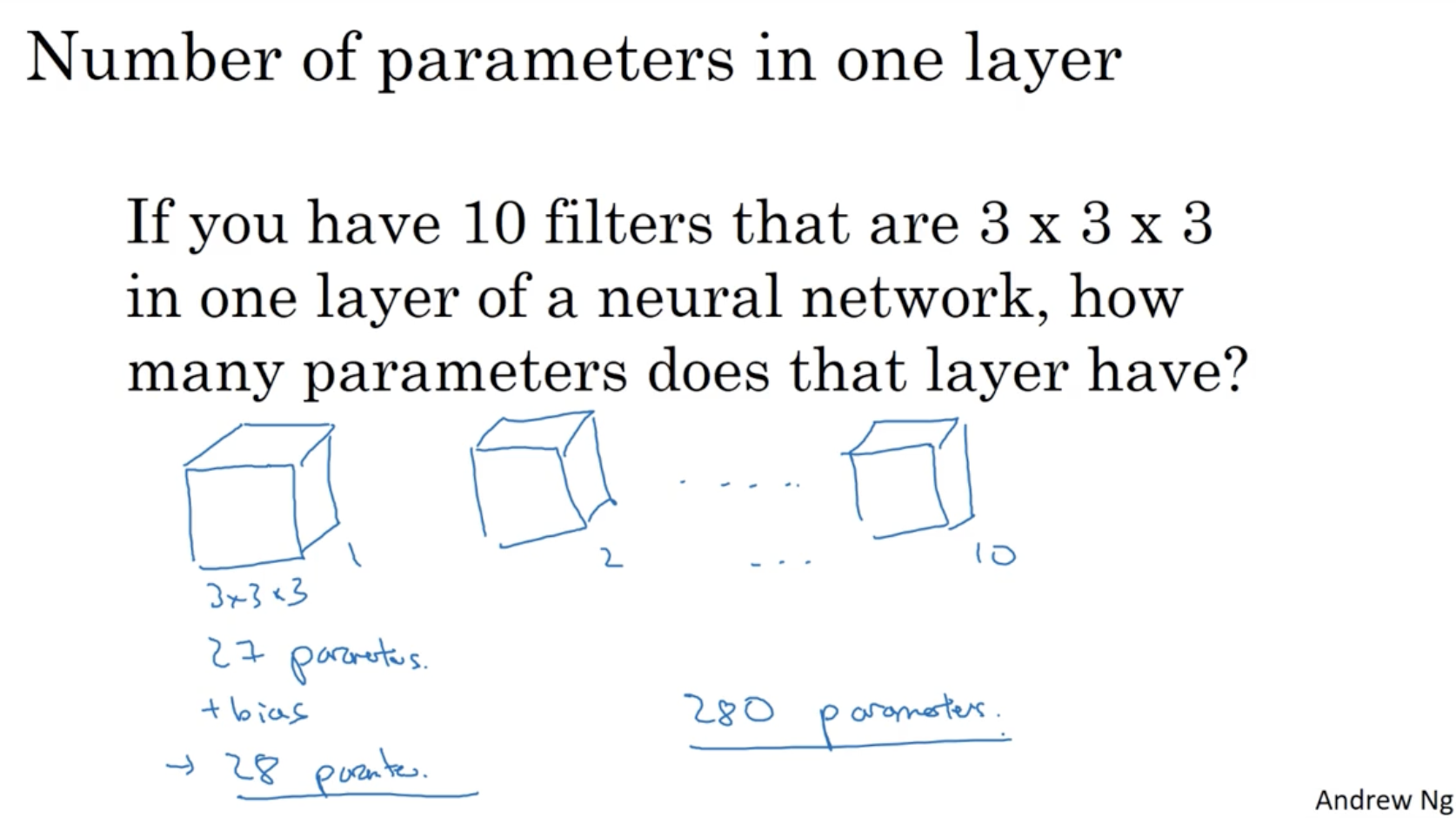
예를 들어, 10개의 3 x 3 x 3 filter를 갖는 레이어라고 가정해보자. 이 경우 필요한 파라미터는 총 몇 개일까?
- 우선 3 x 3 x 3 개의 weights 들이 있다. 즉 27개.
- 그리고 여기에 bias b를 더해줘야 하므로 27 + 1 이 된다. 28개.
- 그리고 총 10개의 filter가 존재하므로 10을 곱해준다. 280개.
- 따라서 이 경우 필요한 파라미터의 수는 총 280개 뿐이다.
- 이 경우 아무리 입력 데이터(이미지)의 차원이 크더라도 필요한 파라미터 수는 280개의 불과하다.
- 따라서 이미지 데이터에 대한 기존의 DNN 방식의 수많은 파라미터 차원과 달리, CNN 방식으로 진행할 경우 필요한 파라미터 수가 매우 적어진다는 장점이 있다.
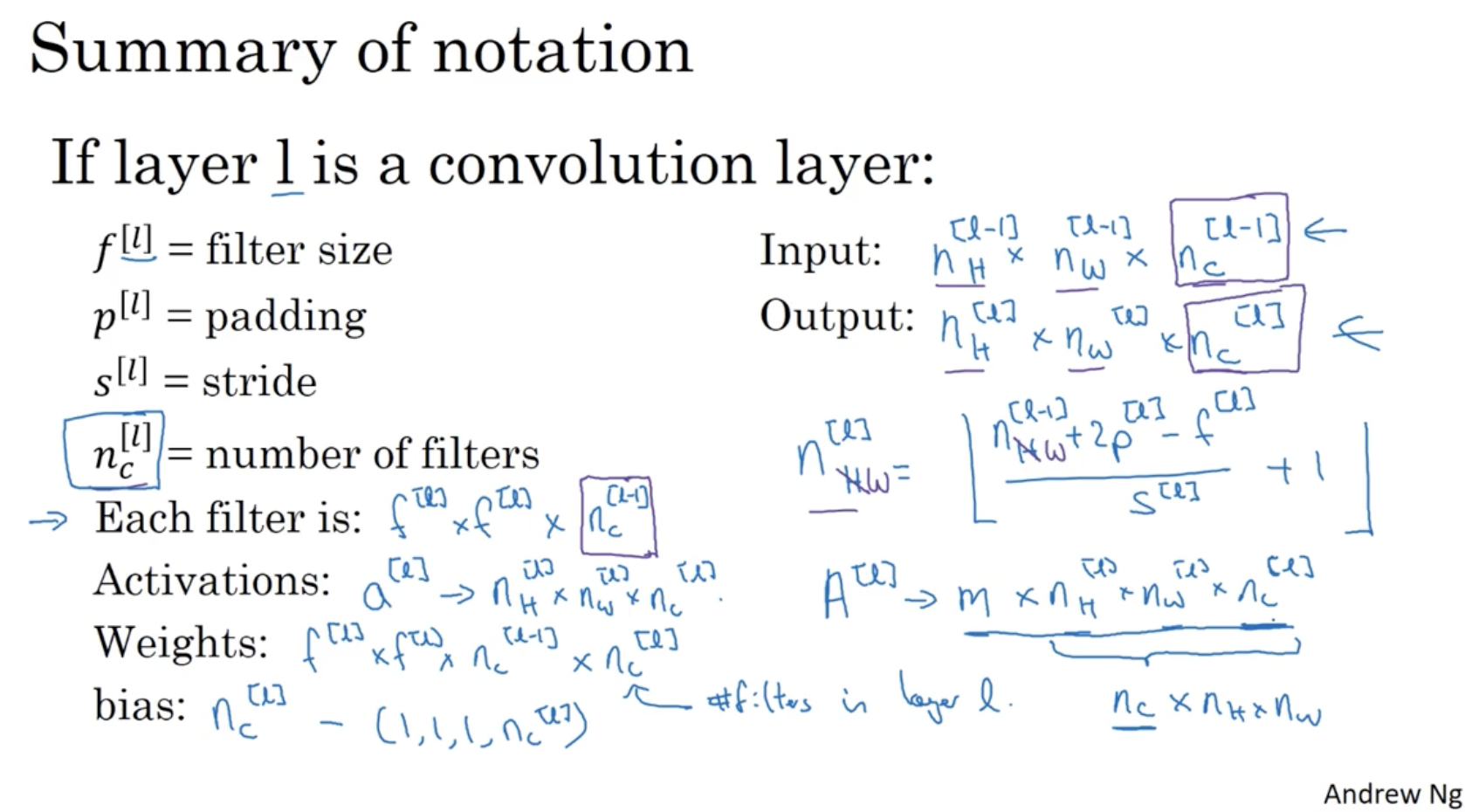
CNN의 notation과 각각의 차원을 요약 정리하면 다음과 같다.
- 번째 convolution layer 가정.
- : 번째 convolution layer에서의 filter size.
- : 번째 convolution layer에서의 padding size.
- : 번째 convolution layer에서의 stride size.
- : 번째 convolution layer에서의 number of filters.
- Input :
- Output :
- 번째 filter 차원 :
- 번째 activations 차원 :
- 번째 weights 차원 :
- 번째 bias 차원 :
- m 개의 데이터셋에 대한 activation matrix
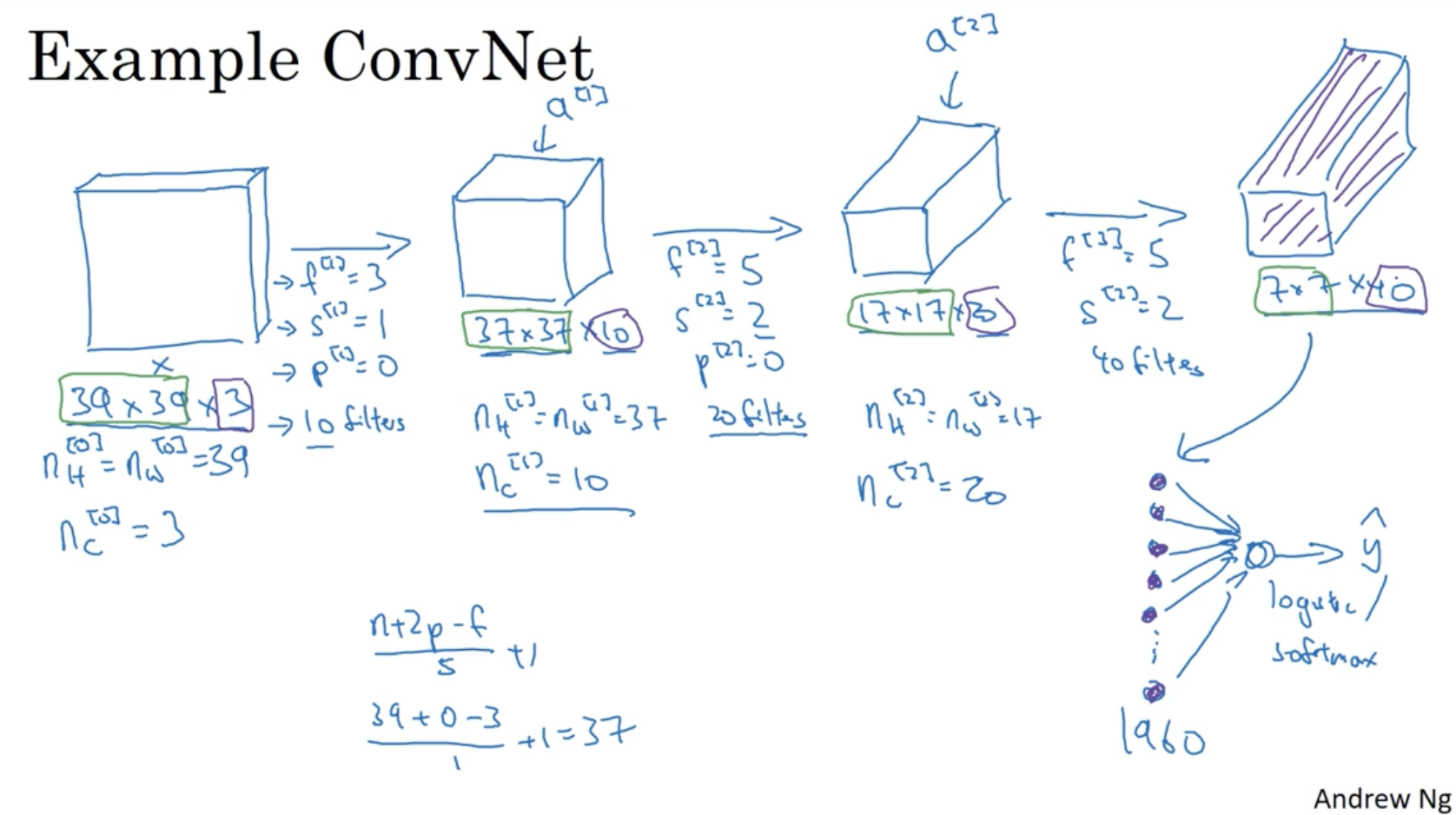
다음은 Convolution layer가 적용된 ConvNet.에 대한 예시이다.
- 보다시피 39 x 39 x 3 입력 데이터로 시작하여 여러 번의 conv layer를 거쳐 7 x 7 x 40 출력 데이터로 마무리된다.
- 그리고 7 x 7 x 40을 벡터화하면 1960개의 원소를 갖는 크기의 를 얻을 수 있다.
- 그리고 여기에 logistic regression이나 softmax 함수를 적용하여 classification을 할 수도 있다.
- 그리고 보통 layer가 길어질수록 입력 이미지의 크기는 줄어들고(39->7) 채널의 크기는 증가한다(3->40).
일반적으로 CNN의 구성 layer는 다음과 같다.
- Convolution layer (CONV)
- Pooling layer (POOL)
- Fully connected layer (FC)
- pooling layer와 fully connected layer는 바로 다음 강의에서 다룬다.
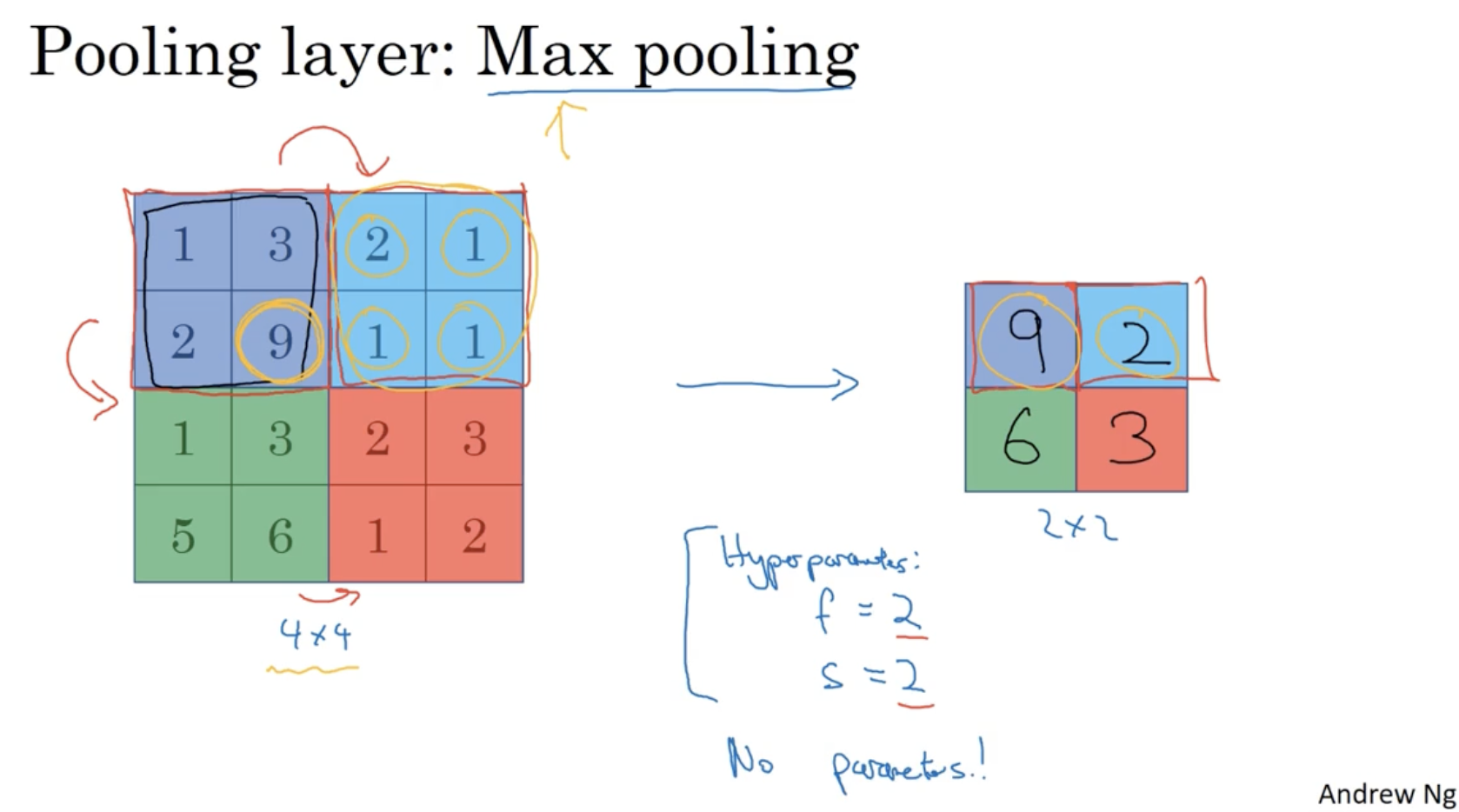
다음으로 pooling 에 대해서 알아본다.
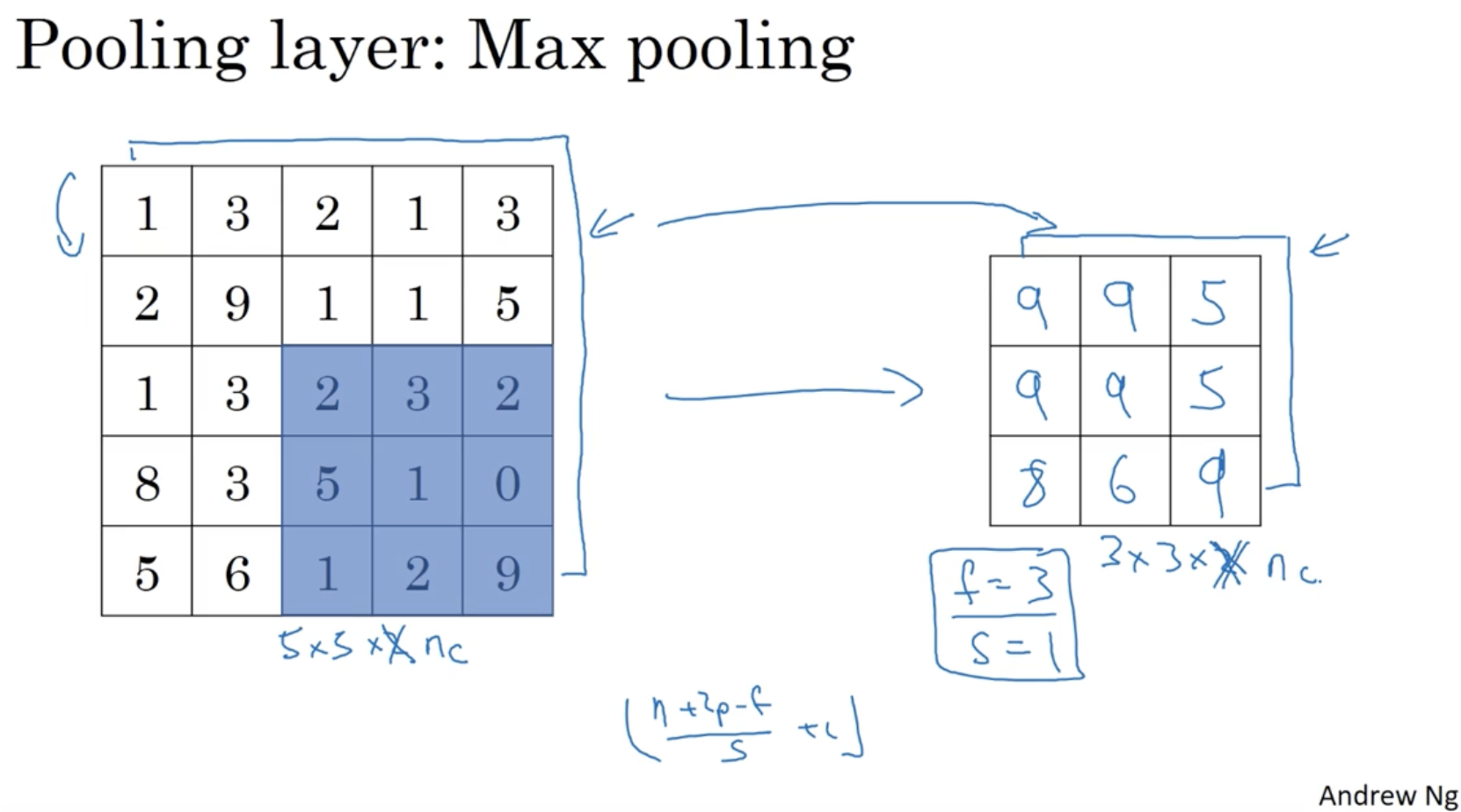
- 아래는 max pooling에 대한 예시이다.
- 아래와 같이 2 x 2 크기의 region에 대해서 stride를 2씩 옮기며 각각의 최대값을 추출한 행렬을 얻는다.
- 출력된 행렬을 보고, 9에 해당하는 쪽에 특정 feature(ex. 고양이 눈)가 존재하고 2에 해당하는 쪽에는 특정 feature(고양이 눈)가 존재하지 않는다고 추측할 수 있다.
- 그리고 아까 convolution의 filter에 적용하는 것처럼 pooling region도 , 를 통해서 결정하며, filter와 달리 pooling에서는 lerning 과정이 존재하지 않는다.
예시로 5 x 5 행렬에 (f=3, s=1) max pooling을 적용한 예시는 아래와 같다.
- 그리고 filter convolution과 마찬가지로 입력 데이터의 채널 수 에 따라 pooling 결과의 채널 수가 결정된다. 그리고 각각의 pooling은 독립적으로 진행된다.
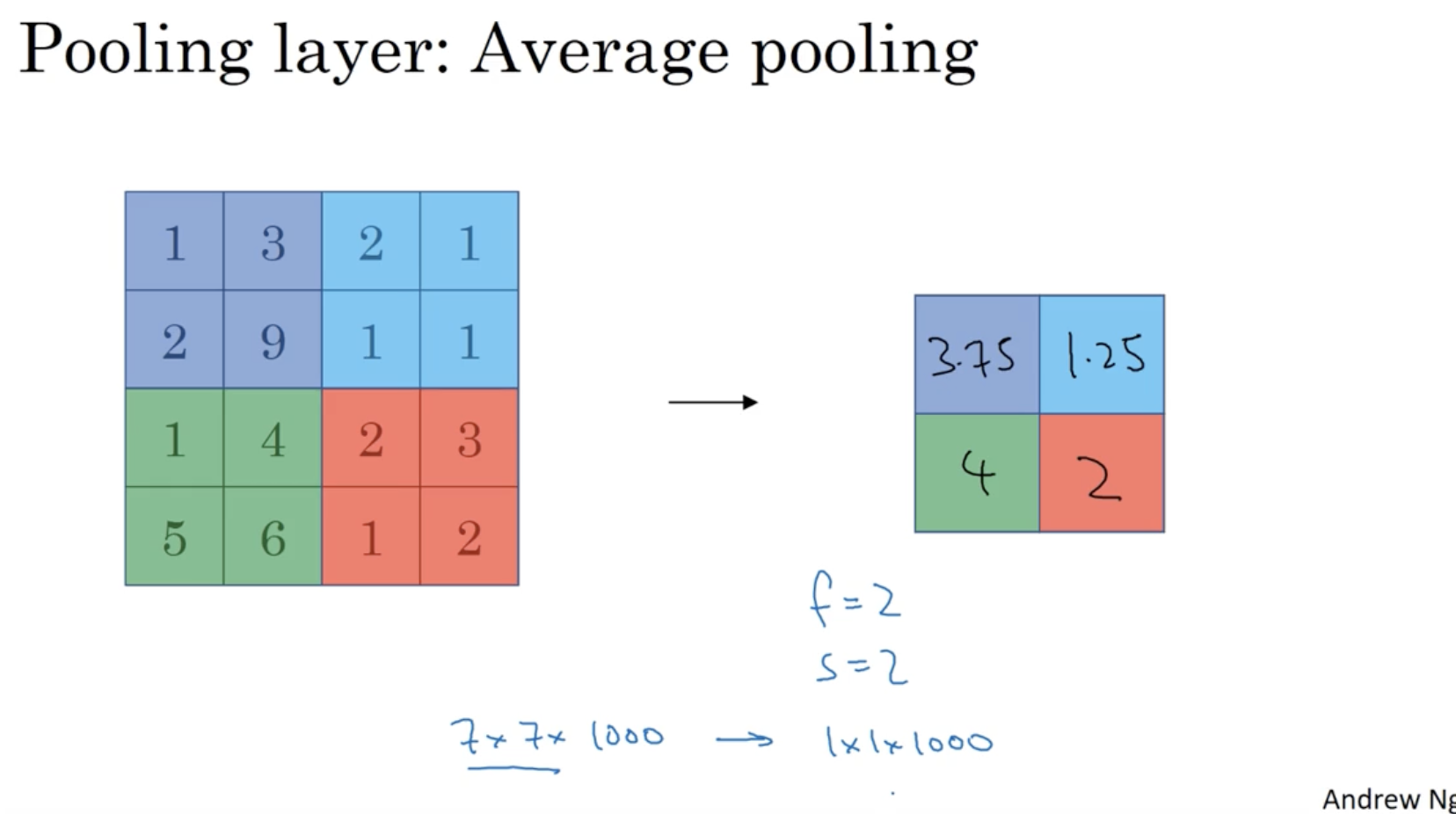
아래는 average pooling의 예시이다.
- max pooling과 달리 모든 요소의 평균값을 추출한 행렬을 얻는다.
- max pooling이든 average pooling이든 결국에는 pooling을 통해서 데이터의 차원을 줄일 수 있다.
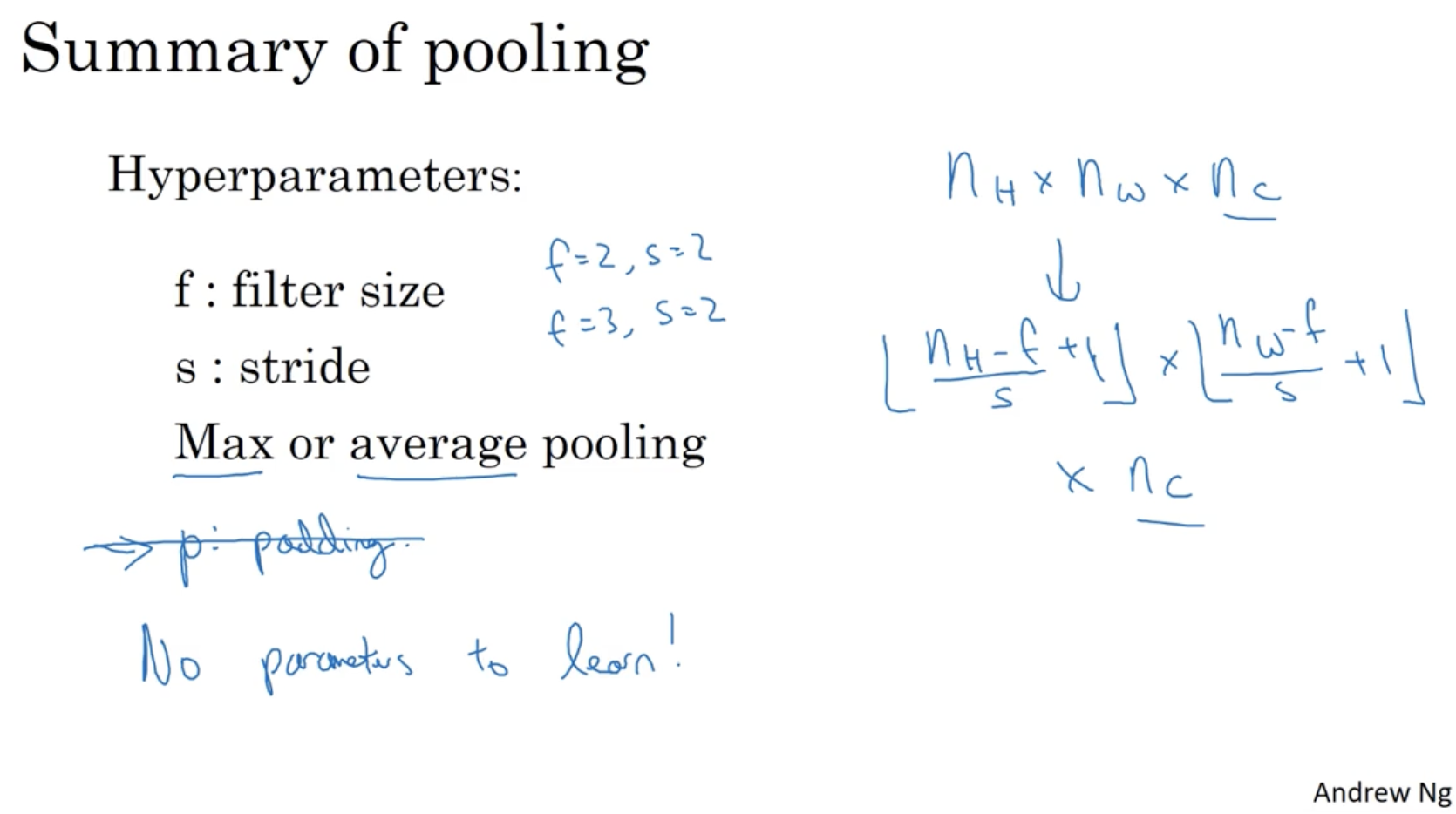
pooling의 내용을 요약하면 아래와 같다.
- 하이퍼 파라미터
- f : filter size
- s : stride
- max인지 혹은 avg인지.
- 그리고 pooling에서는 learning 과정이 없다. (한번 하이퍼 파라미터를 설정하면 그 값에는 변화가 없다.)
- pooling의 output matrix의 차원은 다음과 같다.
- input :
- output :
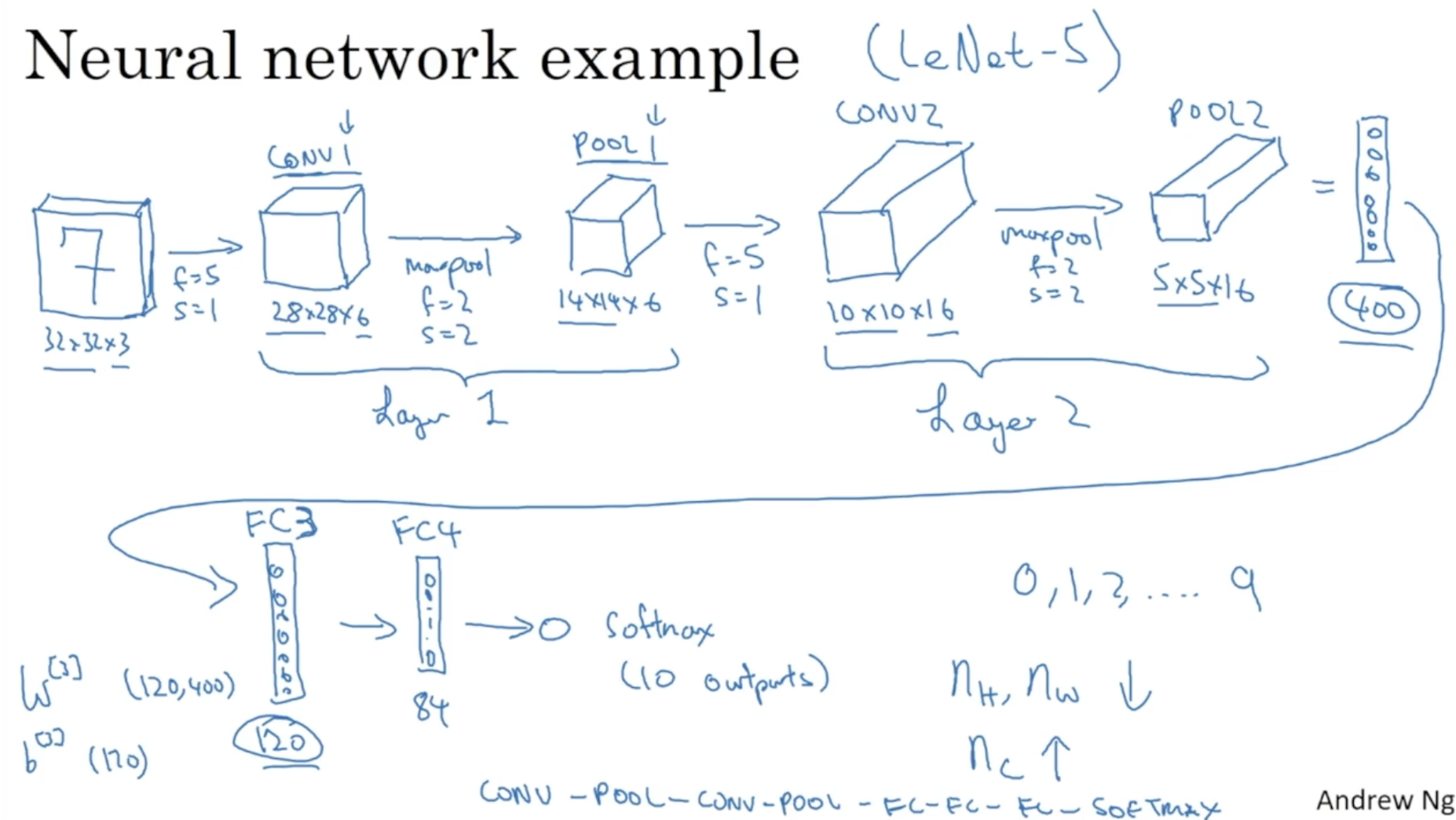
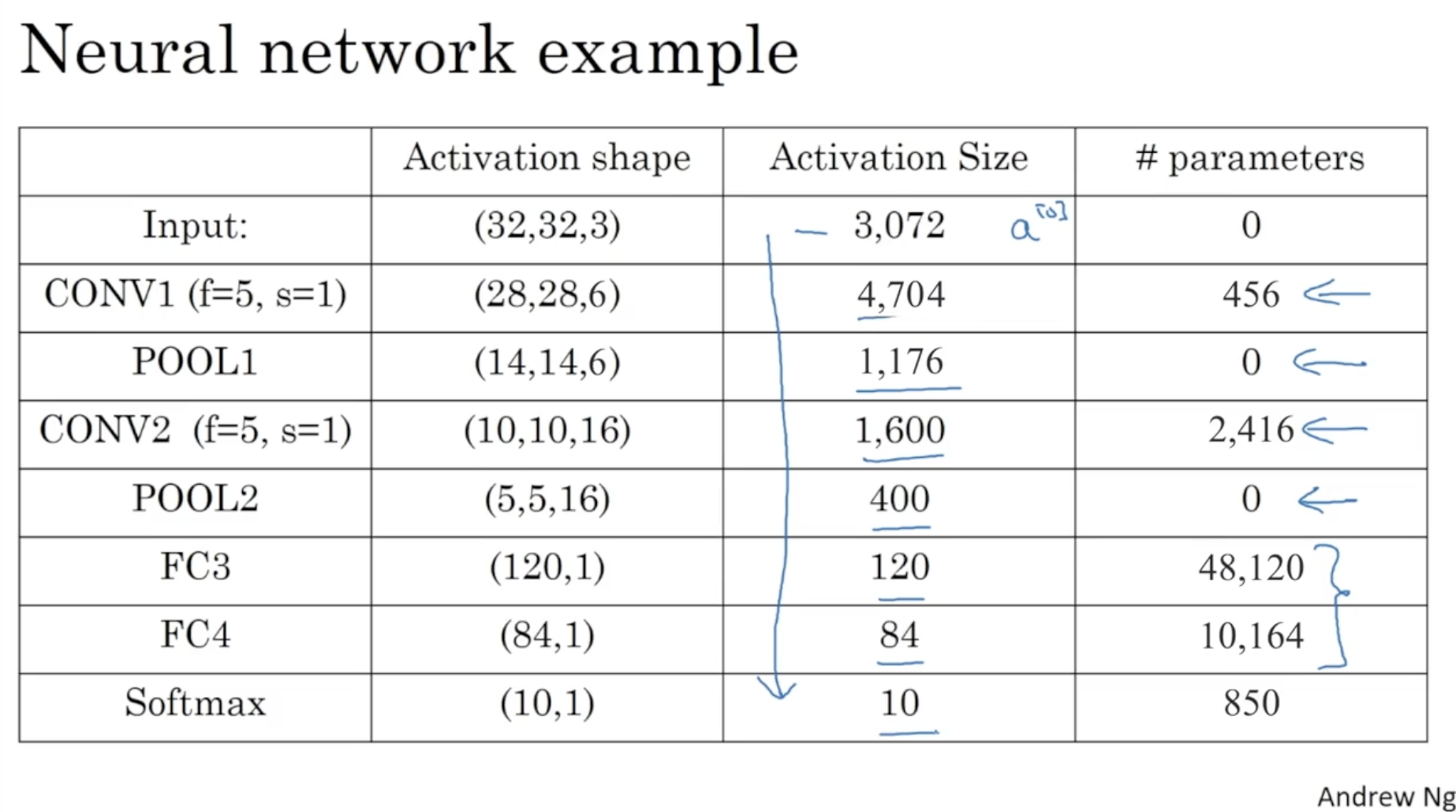
다음은 pooling과 fully conntected layer가 추가된 CNN의 구조를 나타내는 예시이다. (LeNet-5)
- 7이라고 적혀 있는 32 x 32 x 3 크기의 이미지 데이터를 입력으로 넣어서 0, 1, 2, ..., 9 중 하나의 숫자로 인식하는 모델이다.
- 보다시피 (CONV1 + POOL1) -> (CONV2 + POOL2) -> (vectorization) -> FC3 -> FC4 -> ... -> softmax 구조로 이루어져 있다.
- fully connected layer는 비교적 간단한 방식으로 이루어진다. 아래 예시에서 400 차원의 벡터에 대해서 를 적용하여 120 차원의 벡터로 만들 수 있다. 또 이 120 차원의 벡터에 대해서 을 적용하여 84 차원의 벡터로 만들 수 있다.
- 그리고 이 벡터에 softmax를 적용하여 0~9 중 하나의 숫자로 예측할 수 있다.
- 보다시피 모델의 layer가 깊어질수록 이미지 크기()는 줄어들고, 채널 크기()는 증가한다.
위 과정을 표로 정리하면 아래와 같다. layer가 깊어질수록 activation size가 점점 줄어드는 것을 확인할 수 있다.
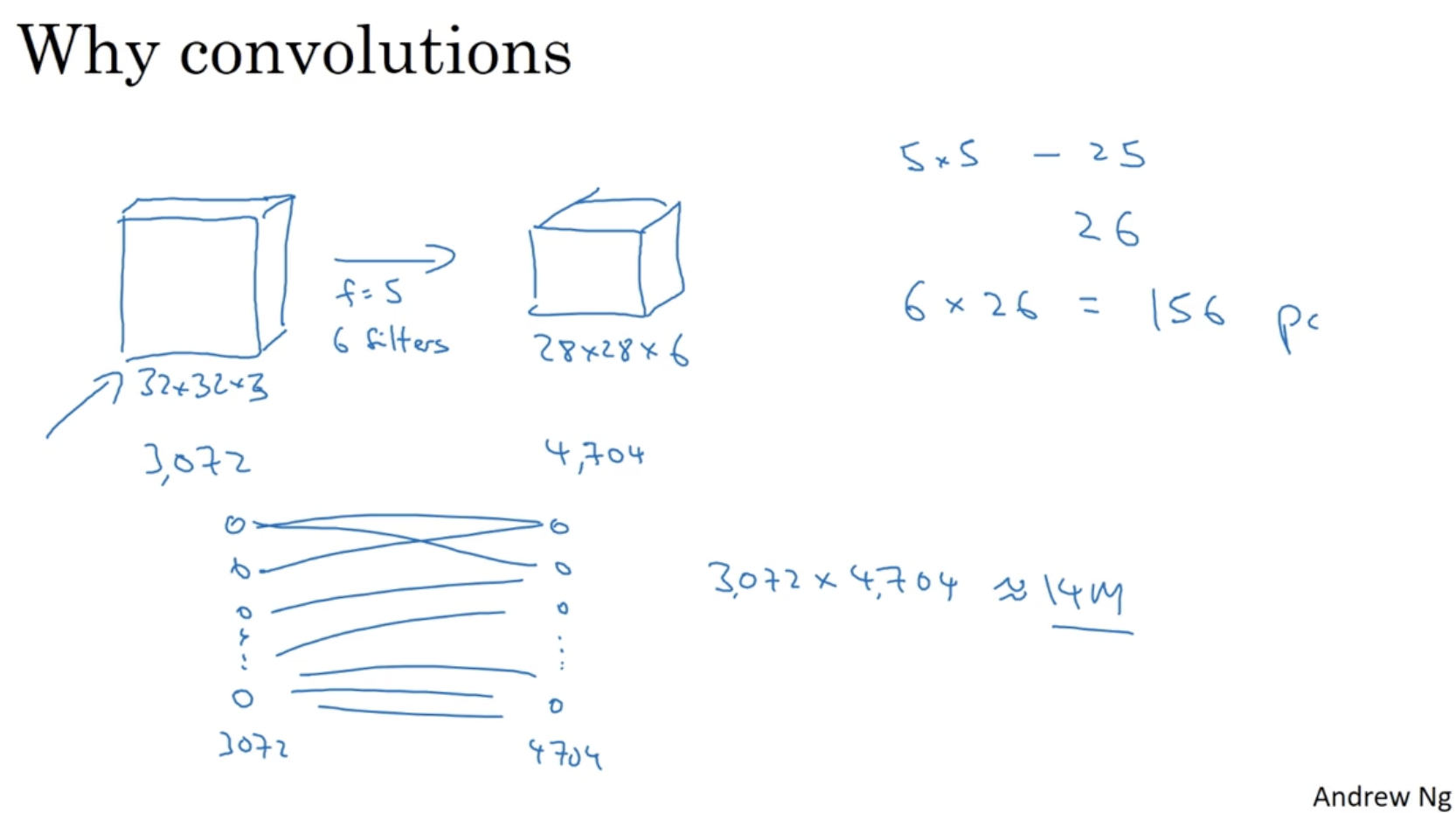
그렇다면 왜 convolution neural net. 이 효과적인지를 알아보자.
- 아래와 같이 32 x 32 x 3 데이터를 28 x 28 x 6 데이터로 만든다고 해보자.
- 만약 일반적인 DNN이라면 학습을 위해 3072 x 4704 개의 weights가 필요할 것이다.
- 하지만 CNN의 경우 이를 위한 filter만 있으면 학습이 가능하다. (5 x 5 = 25개 + bias 1개) x 6 = 156. 즉, 156개의 weights 정보만 있으면 아래 과정을 학습할 수가 있다. 매우 효율적이다.
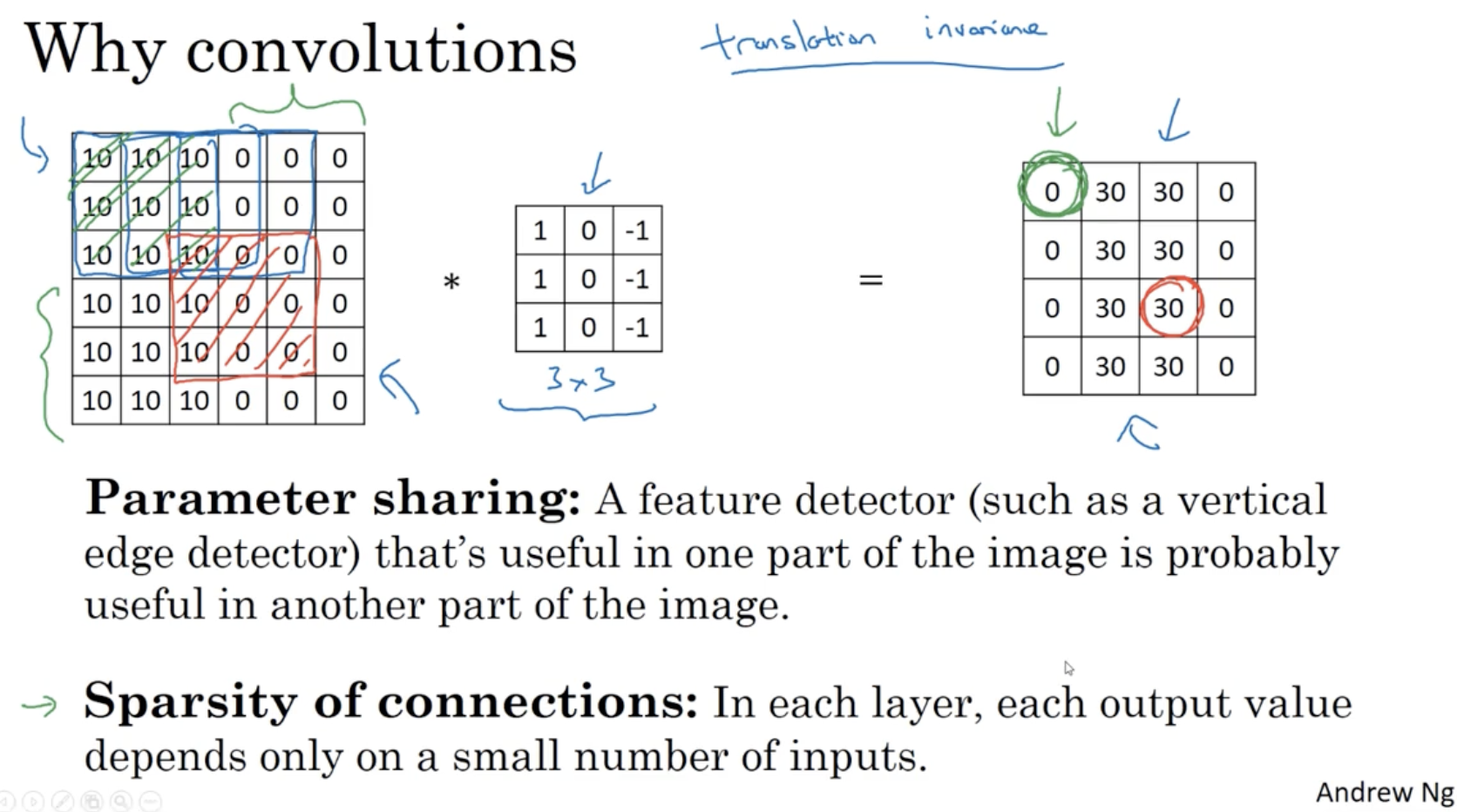
왜 이런 연산이 가능한지는 아래와 같다.
- 하나의 채널의 데이터는 동일한 filter를 공유하기 때문에 파라미터 수가 많이 필요하지 않다.
- 출력 행렬의 요소들은 전체 입력 행렬의 요소를 따지는 것이 아니라 일부 region만 따지면 되기에 파라미터 수가 많이 필요하지 않다.
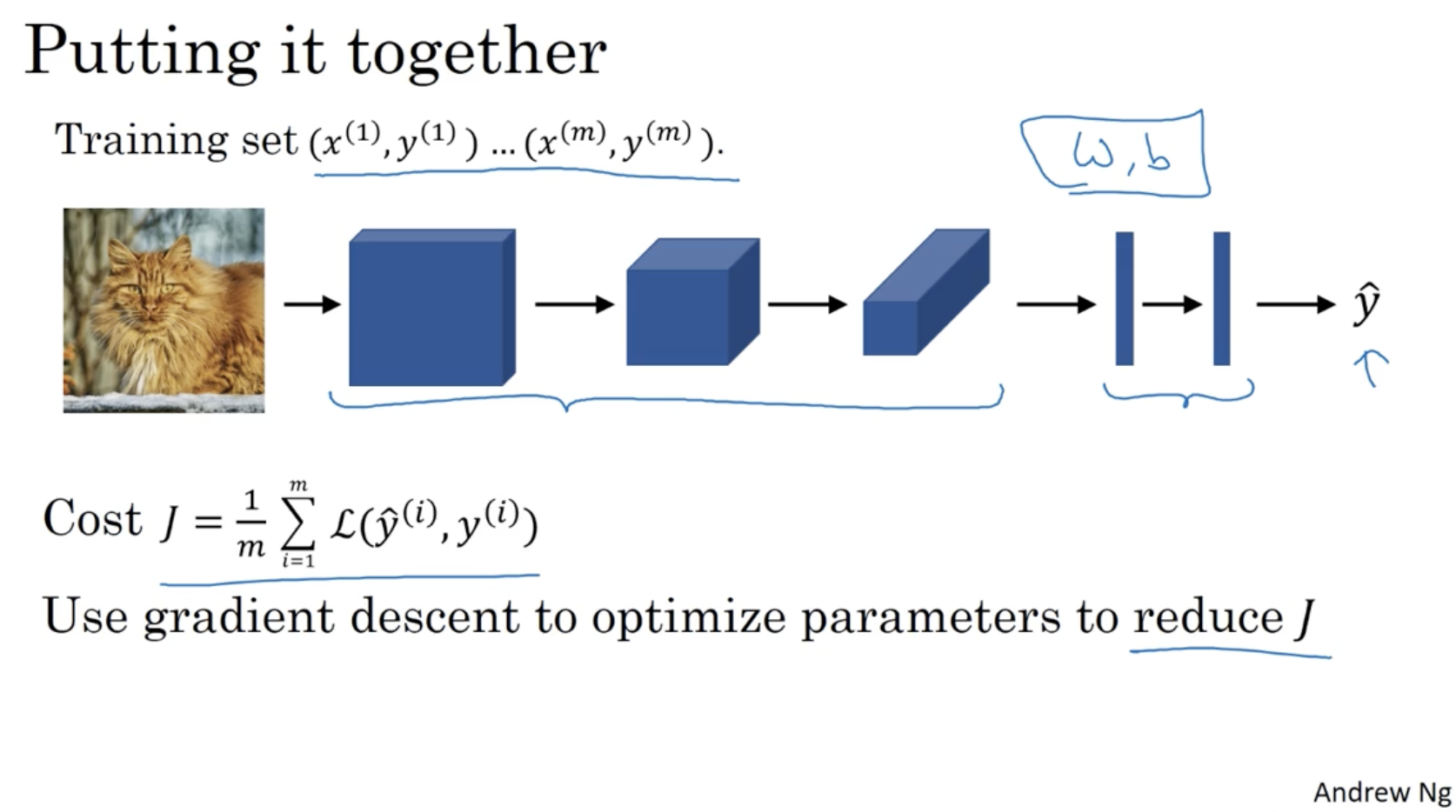
그래서 m개의 데이터셋에 대해서 CNN을 적용하면 아래와 같다.
- 이미지 데이터에 CNN(conv. + pool + fc + ...)을 적용하여 예측값 를 구한다.
- 그리고 cost function 을 구한다.
- 를 줄이기 위한 최적화된 parameter를 찾기 위해 gradient descent alg.을 적용한다.