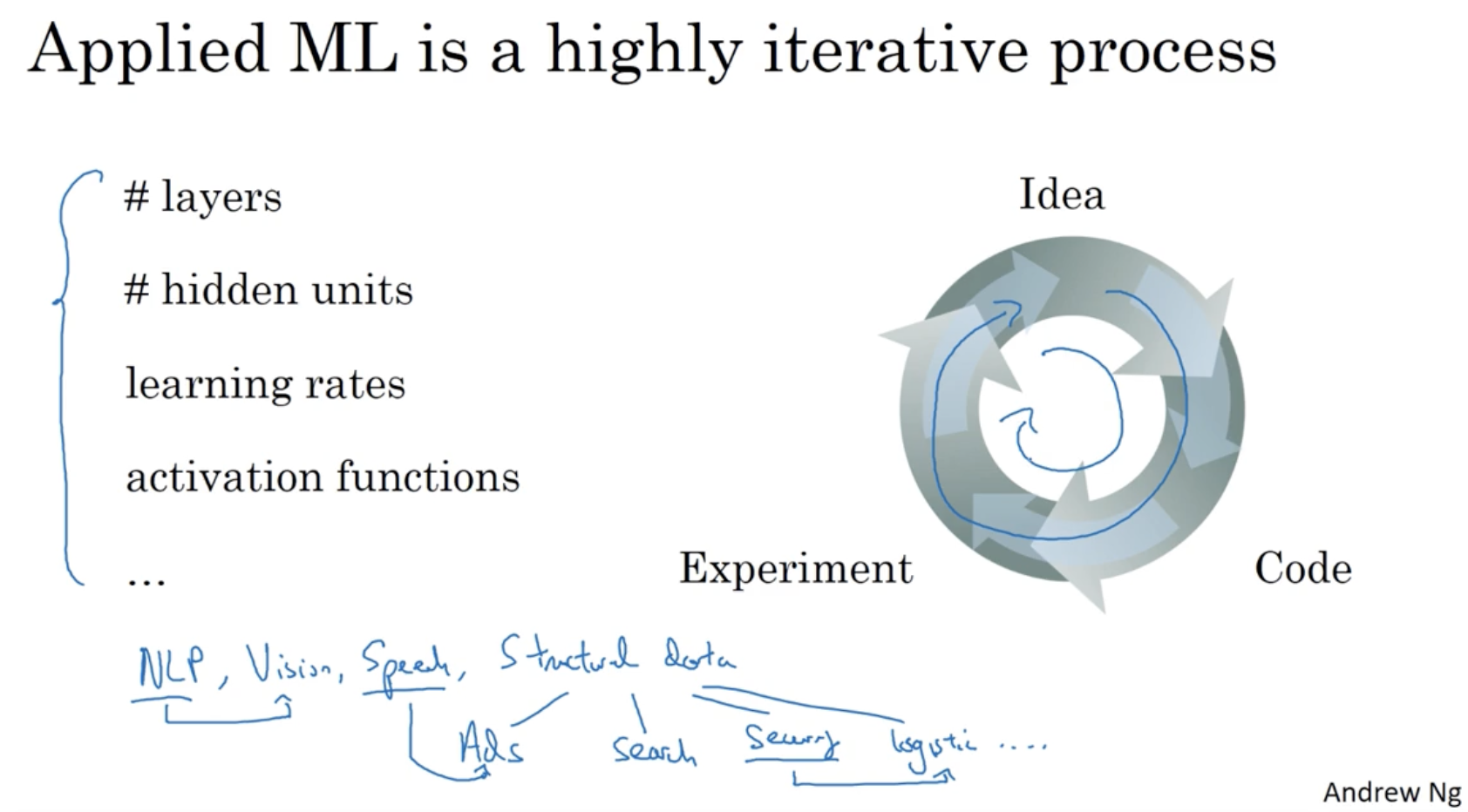
보통 ML을 학습하는 과정은 순환 구조를 이룬다. 아래 그림과 같이 Idea를 Code로 적용하고 Experiment를 통해 결과를 확인하여 새로운 Idea를 적용하고 ... 등의 순환 구조를 이룬다.
- 그리고 Deep NN에서 레이어의 수, 히든 유닛의 수, learning rate, activation function 등의 다양한 하이퍼 파라미터가 존재한다.
보통 딥러닝 모델의 데이터를 다음과 같이 나눈다.
- train set : 학습 데이터 / dev set(cross validation set) : 실험 데이터 / test set : 테스트 데이터
- 데이터 수가 1000, 10000 처럼 적을 경우, 데이터를 (train/test, 70%/30%) 혹은 (train/dev/test, 60%/20%/20%)와 같이 나눈다.
- 하지만 데이터 수가 1,000,000처럼 매우 많을 경우, train/dev 99%/1%처럼 거의 train set으로 활용하며, dev나 test는 1% 이하로 적용한다.

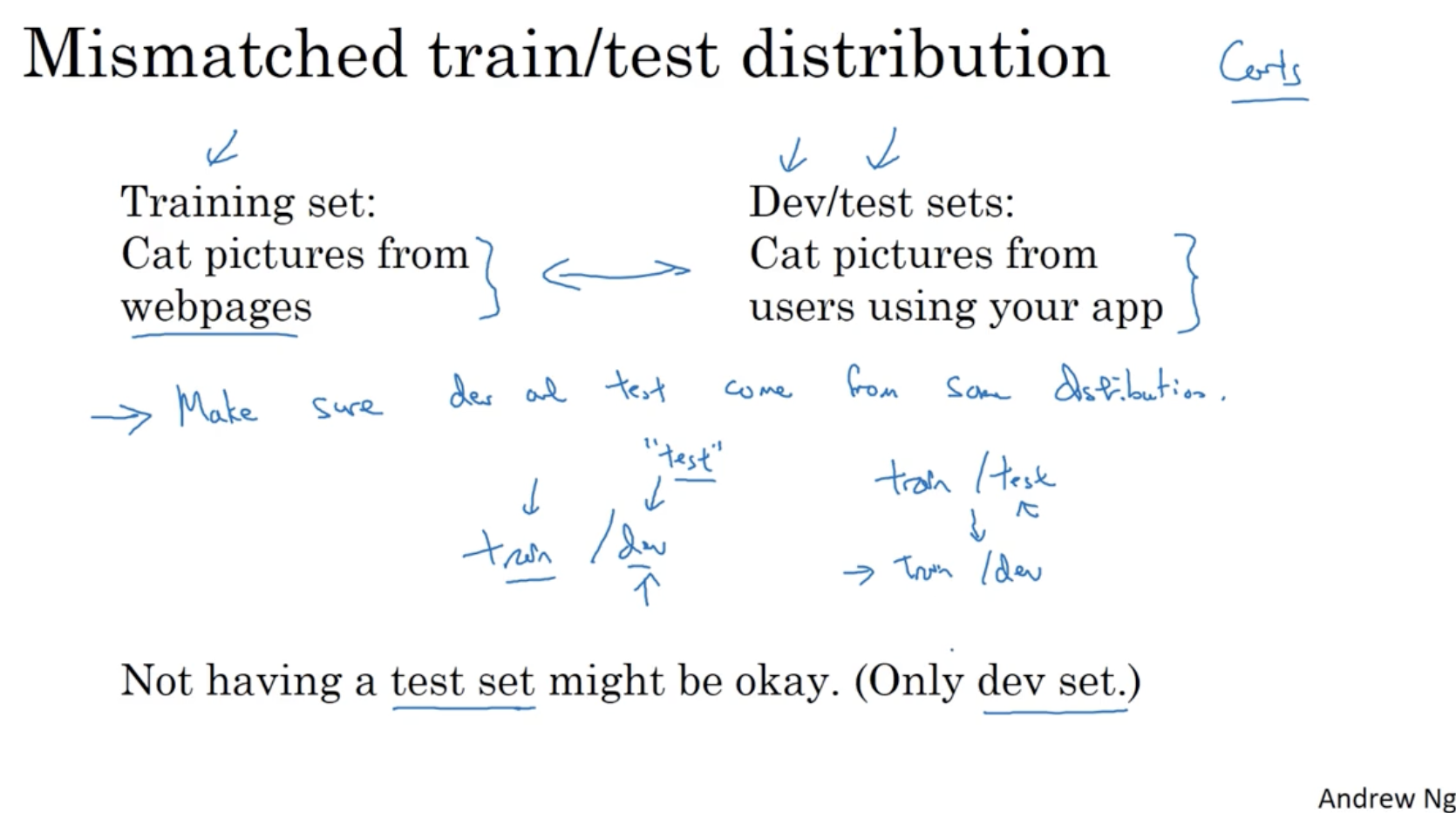
다만 주의할 점이 train set과 dev(or test) set의 데이터가 같은 종류여야 한다는 것이다.
- 예를 들어 웹페이지에서 고양이 이미지를 가지고 학습한 모델에 휴대폰으로 찍은 고양이 이미지로 dev/test set을 적용하면 이는 부적절하다.
- 그리고 데이터가 많을 경우 test set 없이 dev set만 있어도 괜찮다.
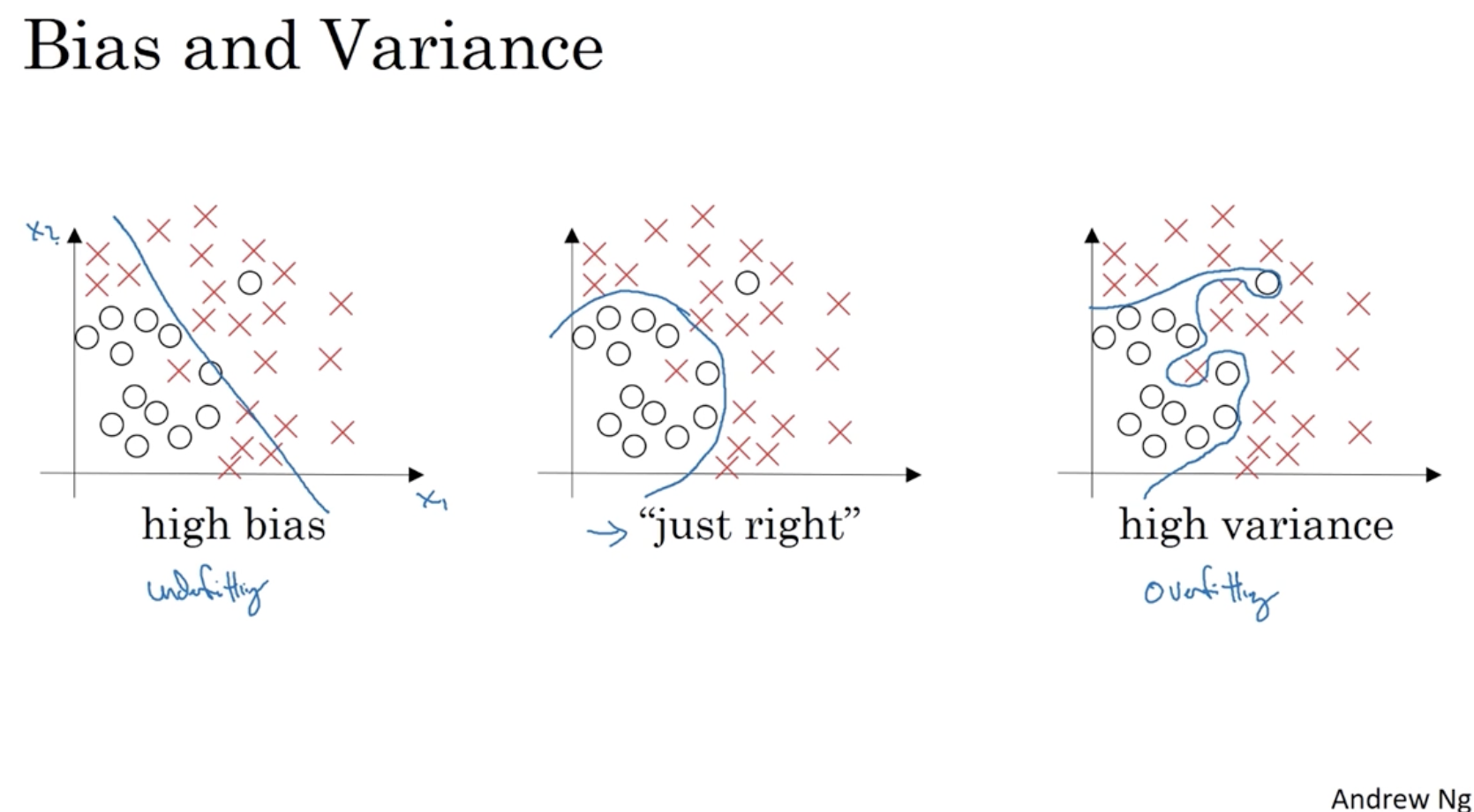
다음으로 bias와 variance 개념을 알아보자
- 아래 그림에서 좌측과 같이 train set에 대해서 높은 error를 보이는 경우를 high bias라고 한다.
- 그리고 우측과 같이 매우 복잡한 함수가 나오는 경우를 high variance라고 한다.
- 따라서 가장 이상적인 모델은 중간에 있는 그래프처럼 train set에 대해서 낮은 에러를 보이며, 함수가 복잡하지 않은 low bias and low variance 모델이다.
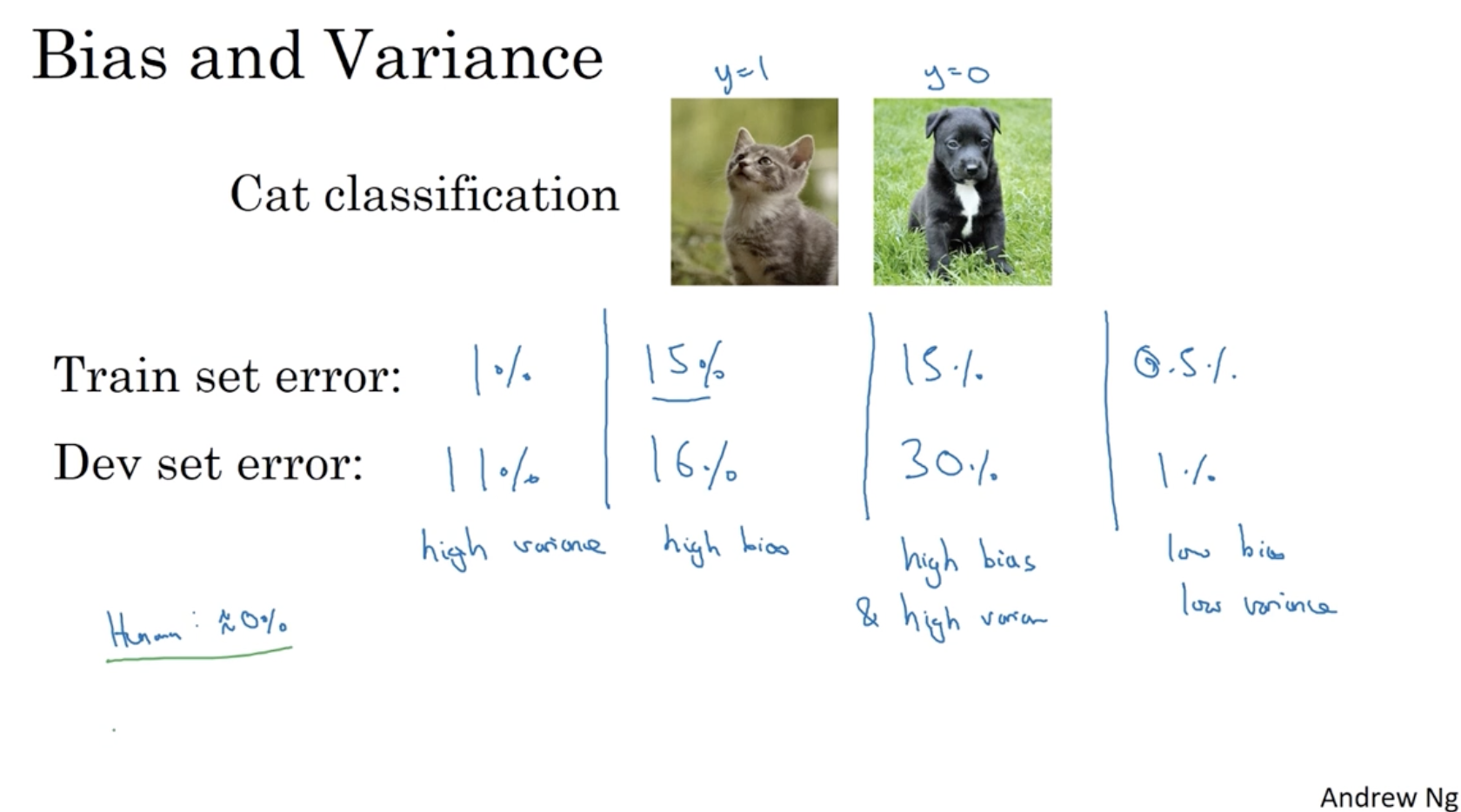
train set과 dev set의 에러에 따른 bias 및 variance를 분류해보자.
- 모델에 이미지를 입력했을 때 이 이미지가 고양인지 아닌지를 분류하는 모델이라고 가정해보자.
- train set error : 1% \ dev set error : 11%
- 이 경우 train set에 대해서는 에러가 낮지만, dev set에 대해서는 에러가 높다.
- 따라서 train set에 맞춰서 복잡한 함수가 만들어진 것으로 보인다.
- 그러므로 이는 high variance에 해당한다.
- train set error : 15% \ dev set error : 16%
- 이 경우 train set에 대한 에러와 dev set에 대한 에러가 비슷한 값으로 높게 나왔다.
- 이는 train set과 dev set 모두 에러가 높게 나오는 high bias를 의미한다.
- train set error : 15% \ dev set error : 30%
- 이 경우 train set에 대한 에러는 높게 나오고, dev set에 대한 에러는 더 높게 나왔다.
- 따라서 이는 비교적 train set에 맞춰진 복잡한 함수가 만들어진 것으로 보인다.
- 그러므로 이는 high bias 및 high variance에 해당한다.
- train set error : 0.5% \ dev set error : 1%
- train set과 dev set 모두 충분히 낮은 에러가 나왔다.
- 그러므로 이는 low bias 및 low variance에 해당한다.
- 그리고 에러가 높다/낮다의 기준은 optimal error (bayes error) 를 어떻게 정의하냐에 따라 다르다. 아래의 경우 optimal error가 0에 가까운 값이라 위와 같은 판단을 할 수가 있다.
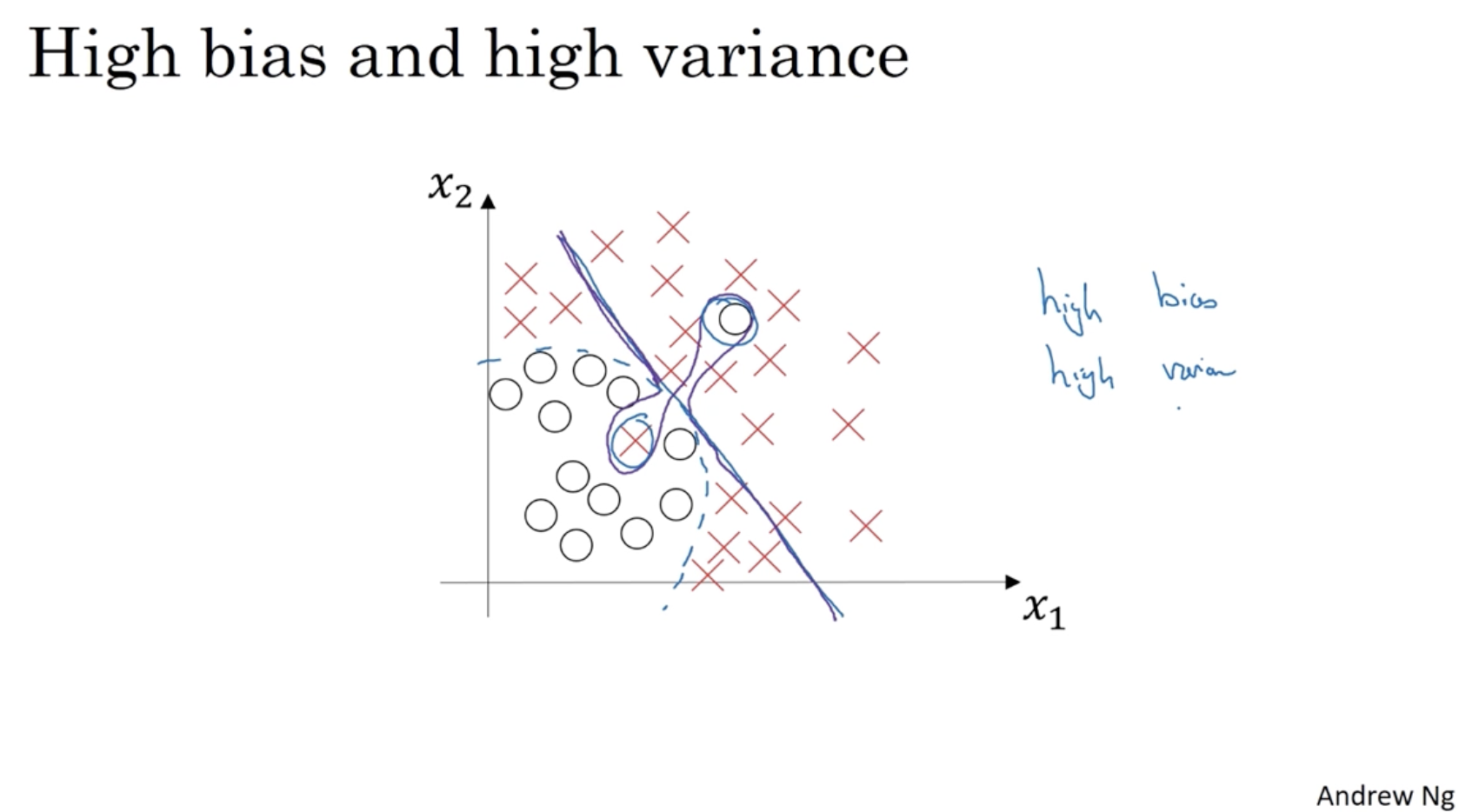
high bias이면서 high variance에 해당하는 그래프는 아래와 같다.
- 매우 복잡한 함수 모양을 가지면서 에러가 높게 나오는 것을 볼 수 있다.
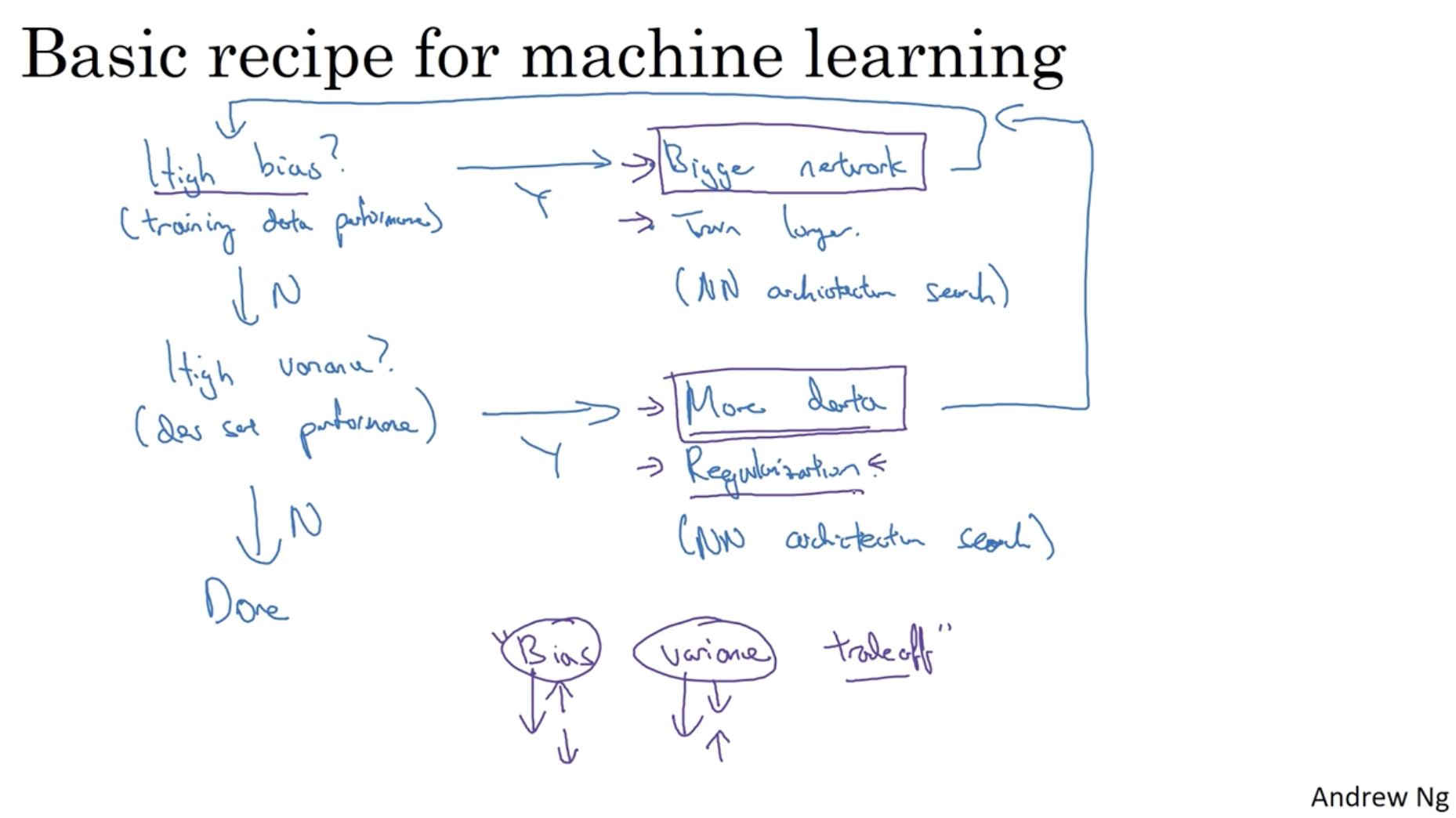
따라서 머신 러닝 모델의 high bias 및 high variance 문제를 해결하려면 아래와 같은 방식으로 적용하면 된다.
- high bias? (to train set)
- 만약 high bias를 보인다면, network를 더 크게 만들면 된다.
- 그러고 나서 다시 모델을 돌려서 high bias 인지를 확인한다.
- 만약 low bias라면 다음 단계인 high variance 여부 단계로 넘어간다.
- high variance? (to dev set)
- 만약 high variance를 보인다면, 1) 데이터를 더 추가하거나 2) Regularization 을 적용한다.
- 그러고 나서 다시 모델을 돌리며 high bias 여부 단계로 넘어간다.
- 만약 low variance라면 해당 모델은 완전한 모델이라고 볼 수 있다.
- 이처럼 bias와 variance는 서로 trade-off 관계에 있다. 이를 잘 조정하는 것이 중요하다.
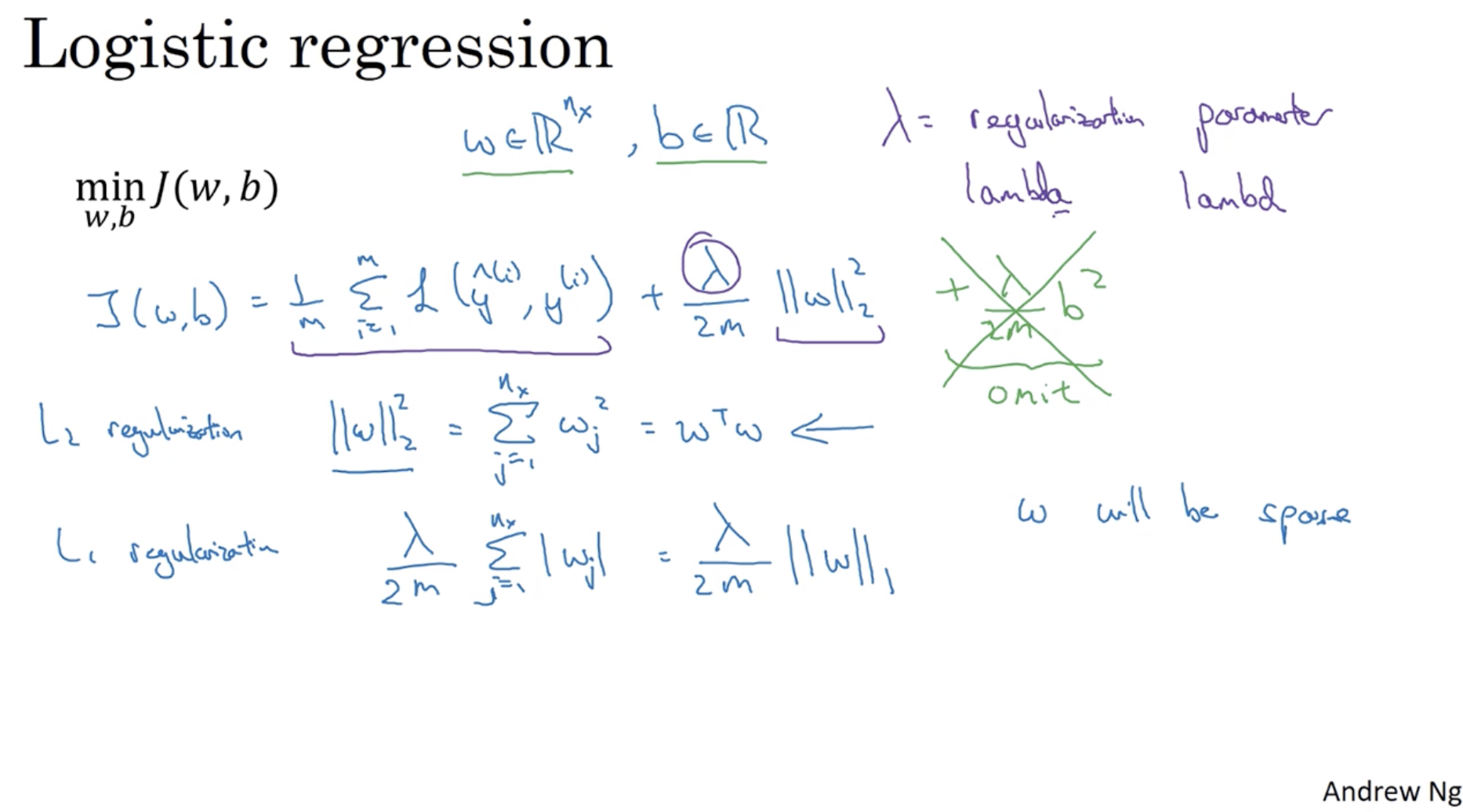
이제 regularization에 대해서 알아보자. 우선 Logistic regression에서의 regularization을 알아본다.
- 아래와 같이 regularization이 적용된 cost function은 다음과 같다.
- L-2 regularization)
- L-1 regularization)
- 위에서 는 regularization parameter를 의미한다. (python에서 lambda는 약속어로 되어 있어 "lambd"로 대신 표기한다.)
- 다만 L-1 regularization은 를 sparse하게 만든다는 단점이 있어 보통 L-2 regularization을 적용한다.
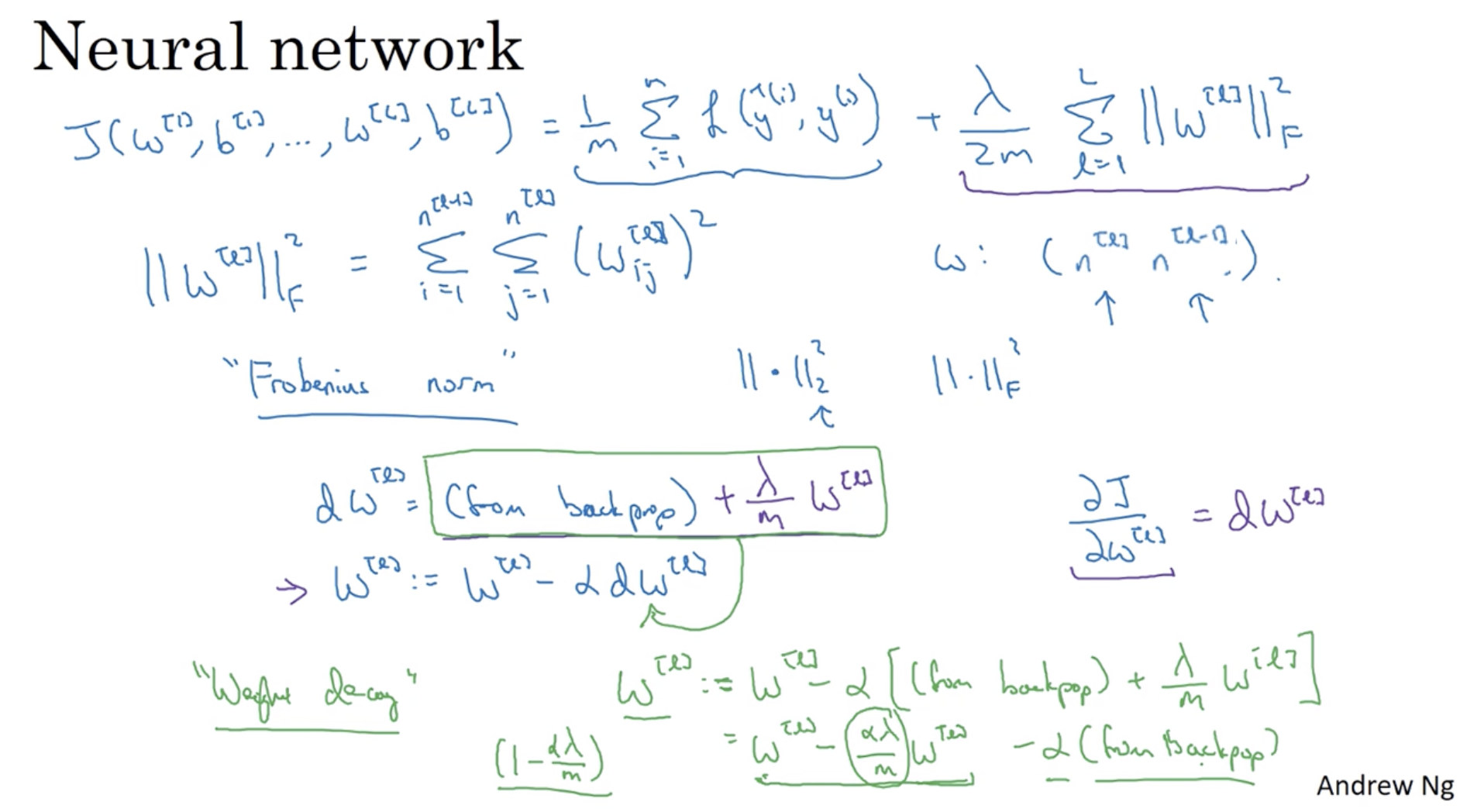
다음은 Neural Network에 대한 regularization이다.
- L-2 regularization이 적용된 nueral net.의 cost function은 다음과 같다.
- 위에서 와 같은 form을 "Frobenius normarization"이라고 한다.
- 그리고 back propgation을 통해 의 미분값을 구한 후 해당 미분값을 가지고 gradient descent alg.을 적용할 수 있다.
- 위에서 이전의 의 weight가 줄어든다는 것을 보장하는 방법은 다음과 같다.
- 는 무조건 1보다 작기 때문에 이전의 의 비중은 줄어들고 의 영향을 더 많이 받을 것이다.
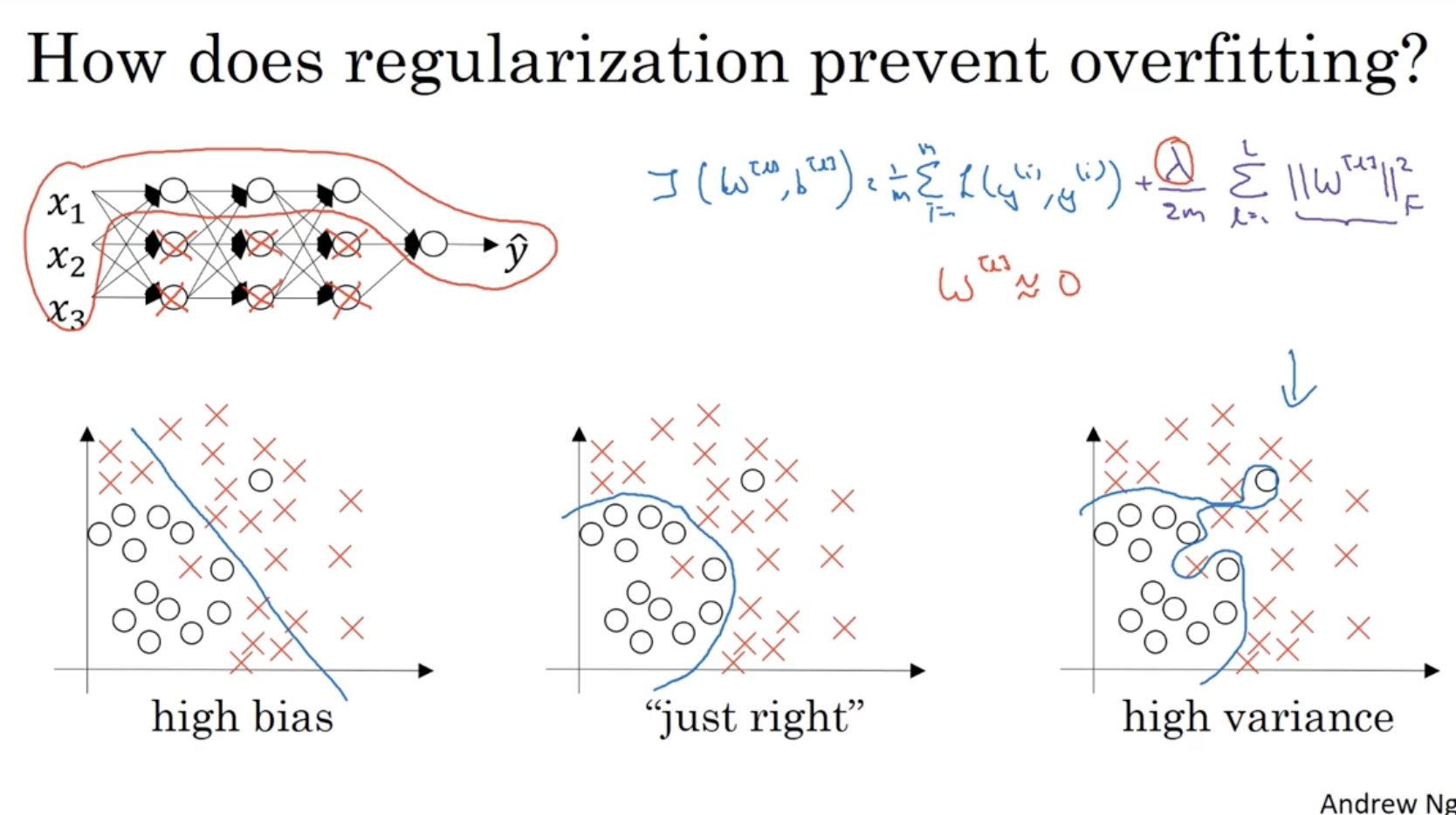
Regularization이 overfitting을 방지하는 직관적인 해석은 다음과 같다.
- 하단 우측 그래프처럼 high variance를 갖는 경우, 과 같이 적용하면, 좌측 상단의 뉴럴넷처럼 다른 유닛들에 대한 가중치는 0이 되기에, 비교적 단순한 구조의 뉴럴넷이 만들어진다.
- 따라서 이전의 복잡한 (high variance) 뉴럴넷 구조를 와 같이 특정 가중치를 줄여서 간단한 뉴럴넷 구조를 만들 수 있기에 regularization이 overfitting을 방지할 수 있다고 볼 수 있다.
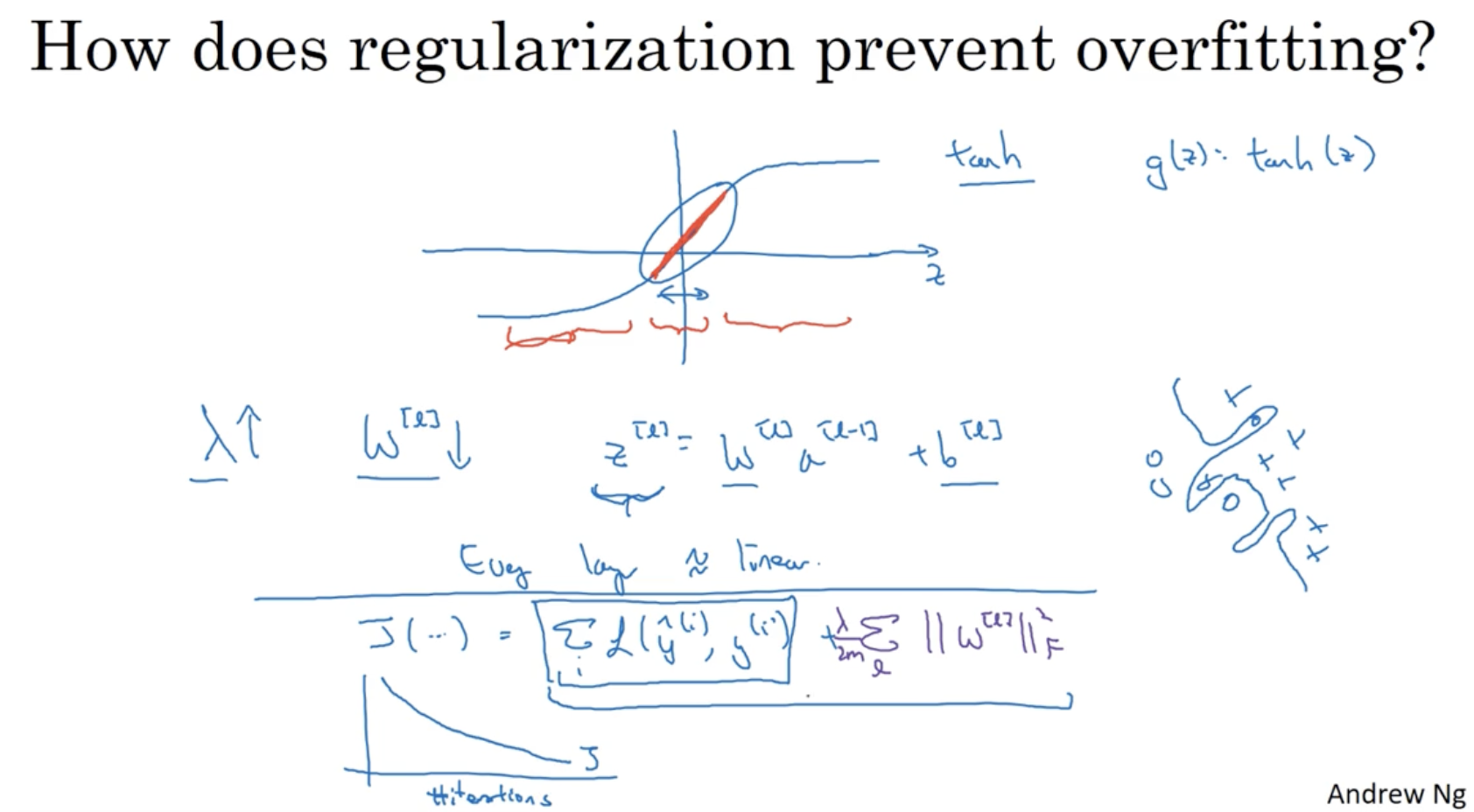
다음 내용도 regularization이 overfitting을 방지한다는 것을 보여주는 설명이다.
- 와 같은 activation function을 적용할 때, 값이 너무 크거나 너무 작으면 기울기가 0에 가까워진다. 이러한 경우 모델 구조는 더 복잡해질 것이다.
- 따라서 값을 늘리면 cost function에 의해서 의 값을 더 줄이려고 할 것이고, 이렇게 되면 의 값도 범위가 줄어든다. (너무 크거나 너무 작아지지 않게 된다.)
- 그리고 이로 인해 의 값은 linear한 값이 나올 것이고, 따라서 모든 layer는 거의 linear한 구조를 이루게 된다. (= 단순한 구조를 이루게 된다.)
- 결론적으로 regularization 의 값을 높이면 의 값은 줄어들게 되고, 이로 인해 와 같은 activation function은 linear한 구조를 띄며 모든 layer 역시 linear한 단순한 구조를 이루게 된다. 따라서 overfitting을 방지할 수 있다.
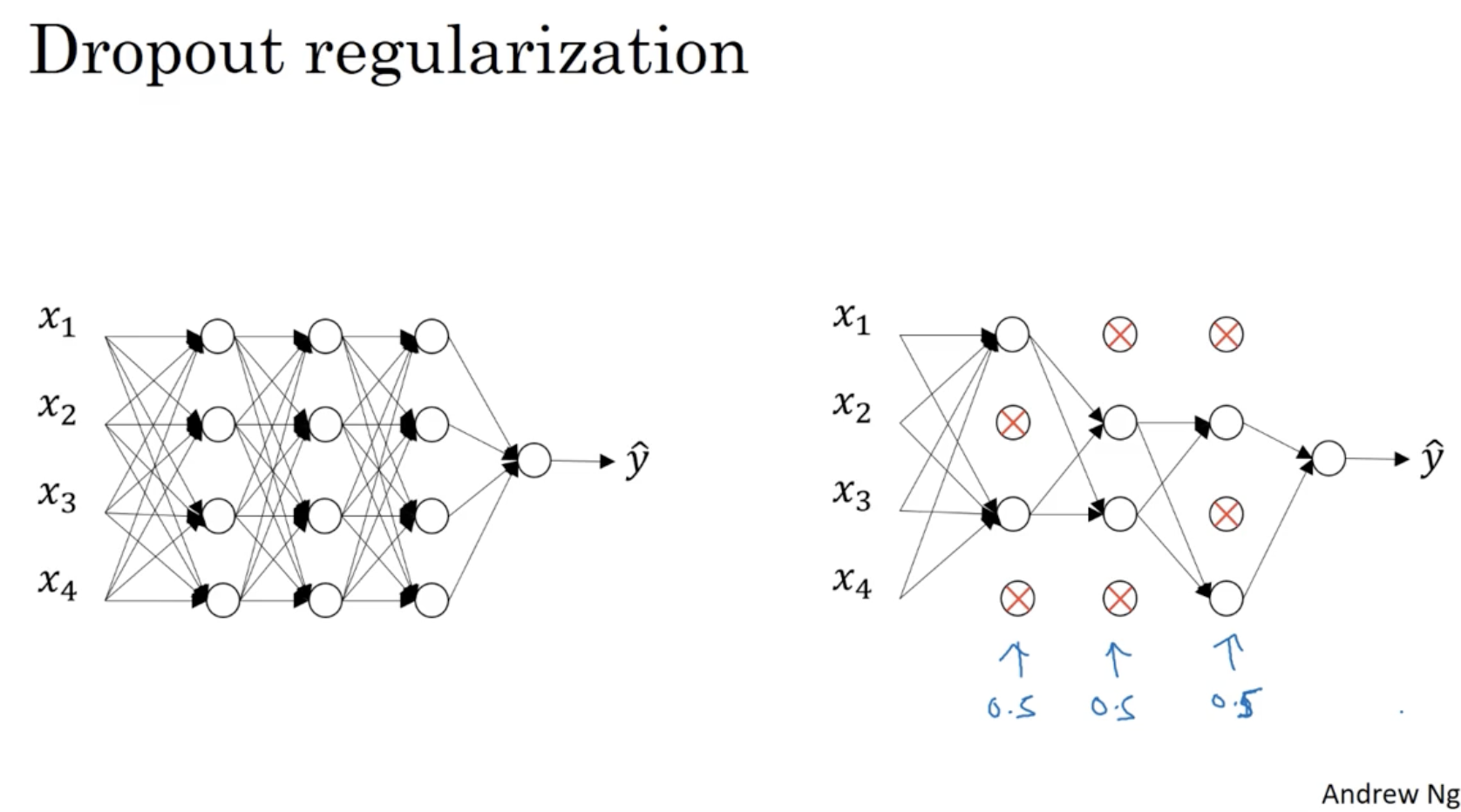
위에서는 L-2 regularization에 대해서 배웠다. 이제는 Dropout regularization에 대해서 알아본다.
- 아래와 같이 각 레이어마다 정해진 확률()로 히든 레이어의 유닛을 drop한다.
- 0.5의 확률로 unit을 drop하면 좌측처럼 복잡했던 뉴럴넷이 우측처럼 단순해지는 것을 확인할 수가 있다. 따라서 overfitting을 방지할 수 있다.
- 이 방법이 dropout regularization 이다.
Inverted Dropout 을 구현하는 방법은 아래와 같다.
- keep_prob : 유지할 유닛의 확률 조건
d3 = np.random.rand(a3.shpae[0], a3.shape[1]) < keep_prob:
(a3.shpae[0], a3.shape[1]) 차원을 갖는 랜덤한 행렬을 만든 후 해당 값이 keep_prob보다 작은지를 확인한다. 모든 element의 값은 True or False로 나온다.a3 = np.multiply(a3, d3):
위에서 구한 d3를 기존의 a3에 element-wise product하여 전체 유닛 중 0.2 만큼의 유닛들을 drop한다.a3 /= keep_prob:
에서, 은 80%만 유지되니 에도 80%만 유지되도록 하기 위해 a3을 keep_prob(0.8) 만큼 나눠준다.
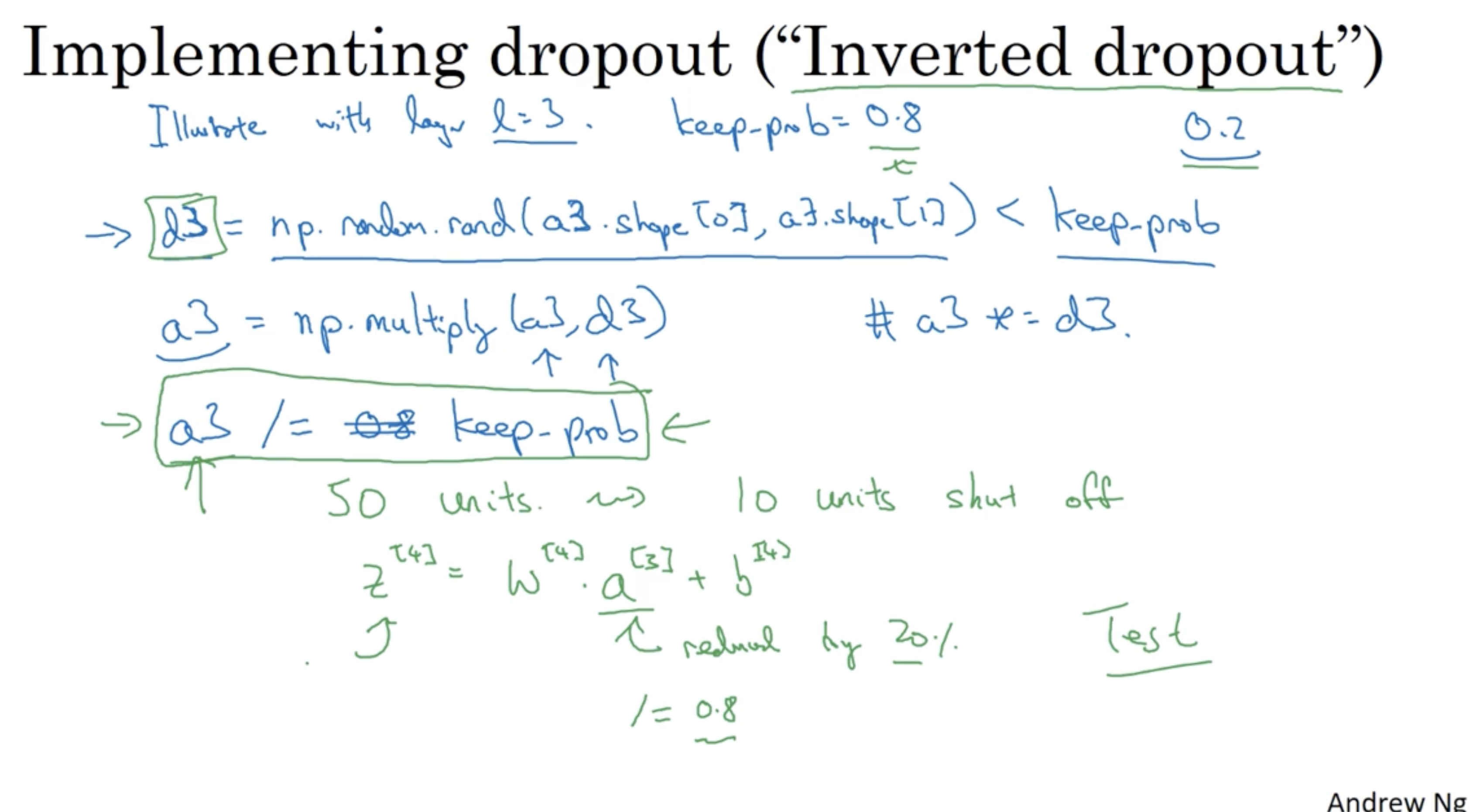
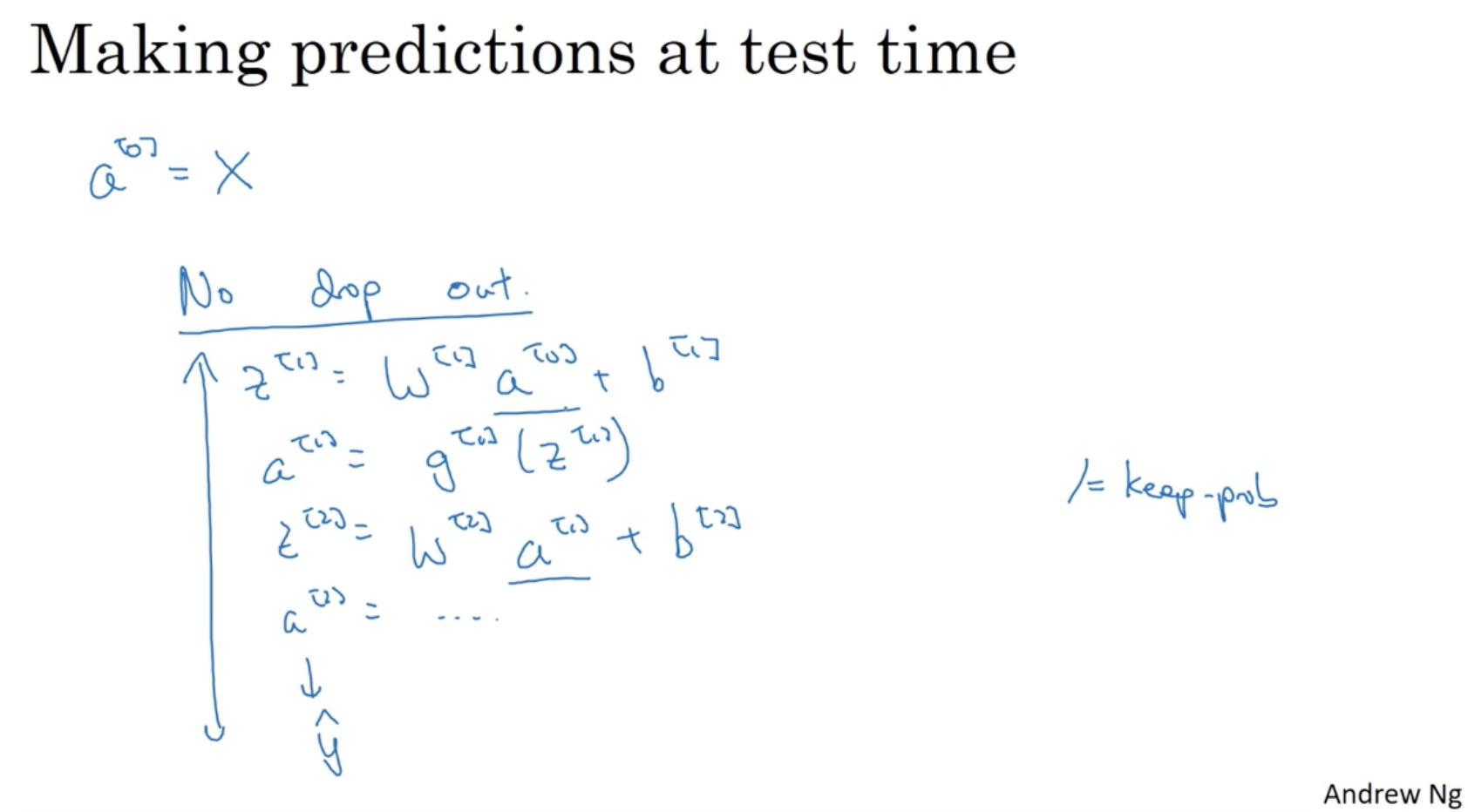
그리고 dropout 과정은 학습 과정 (forward propagation) 시에만 적용되며, test 과정에서는 적용되지 않는다.
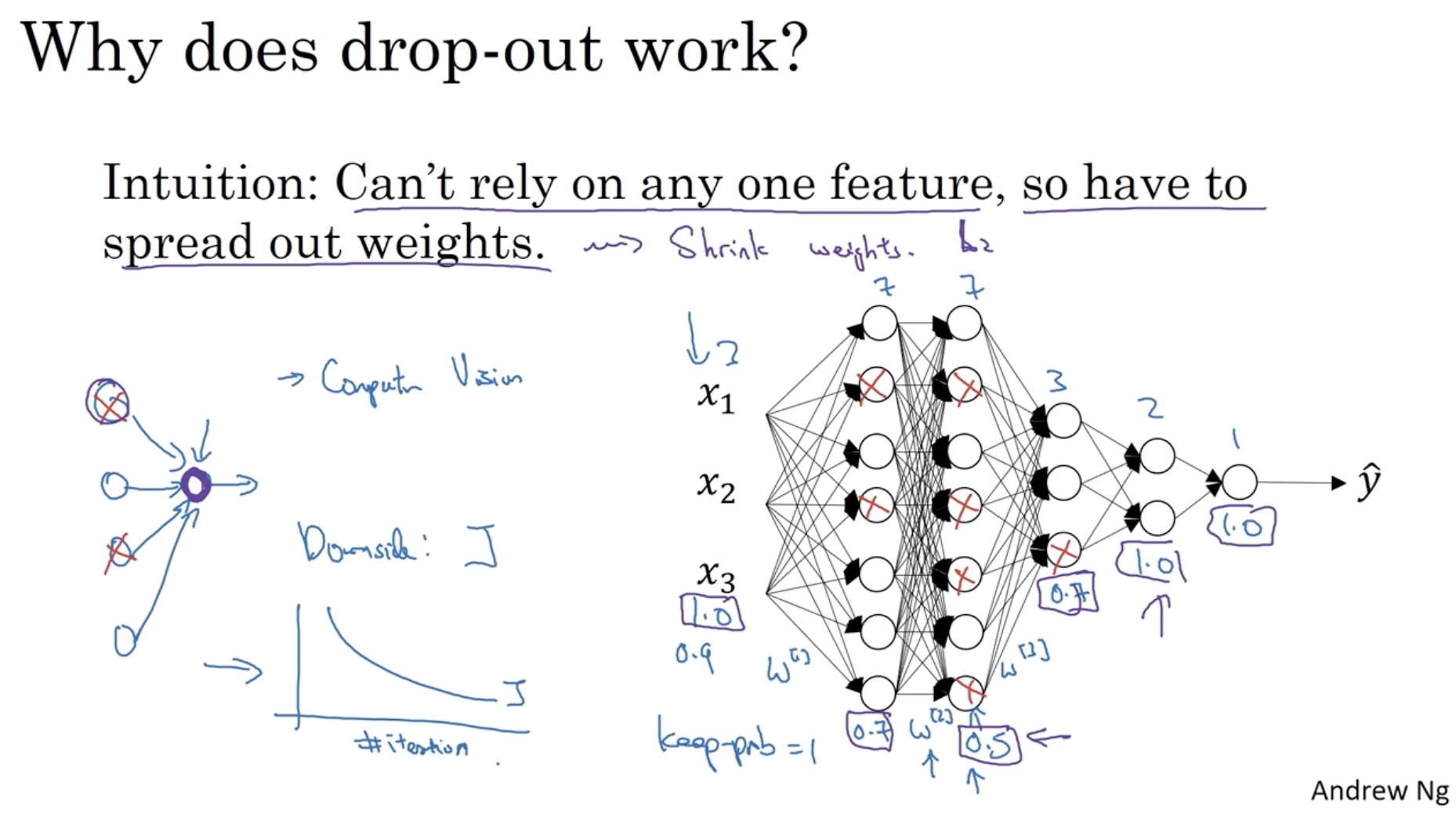
아래와 같이 각 레이어마다 keep_prob 값을 달리 적용하면서 복잡한 레이어의 가중치를 줄일 수도 있다.
- 다만 cost function dropout에 따라 를 재정의하는 것을 매우 복잡하기 때문에 최적의 dropout을 찾는 것은 직관에 의존할 수밖에 없다. (keep_prob을 1로 세팅하고 테스트해보고 0으로 세팅하고 테스트는 하는 등)
- 특히 컴퓨터 비전의 경우, 데이터의 차원이 매우 높기 때문에 dropout을 많이 적용하고 있다.
L-2 regularization 및 dropout regularization 뿐만 아니라 overfitting을 방지할 수 있는 방법은 여러 개가 존재한다.
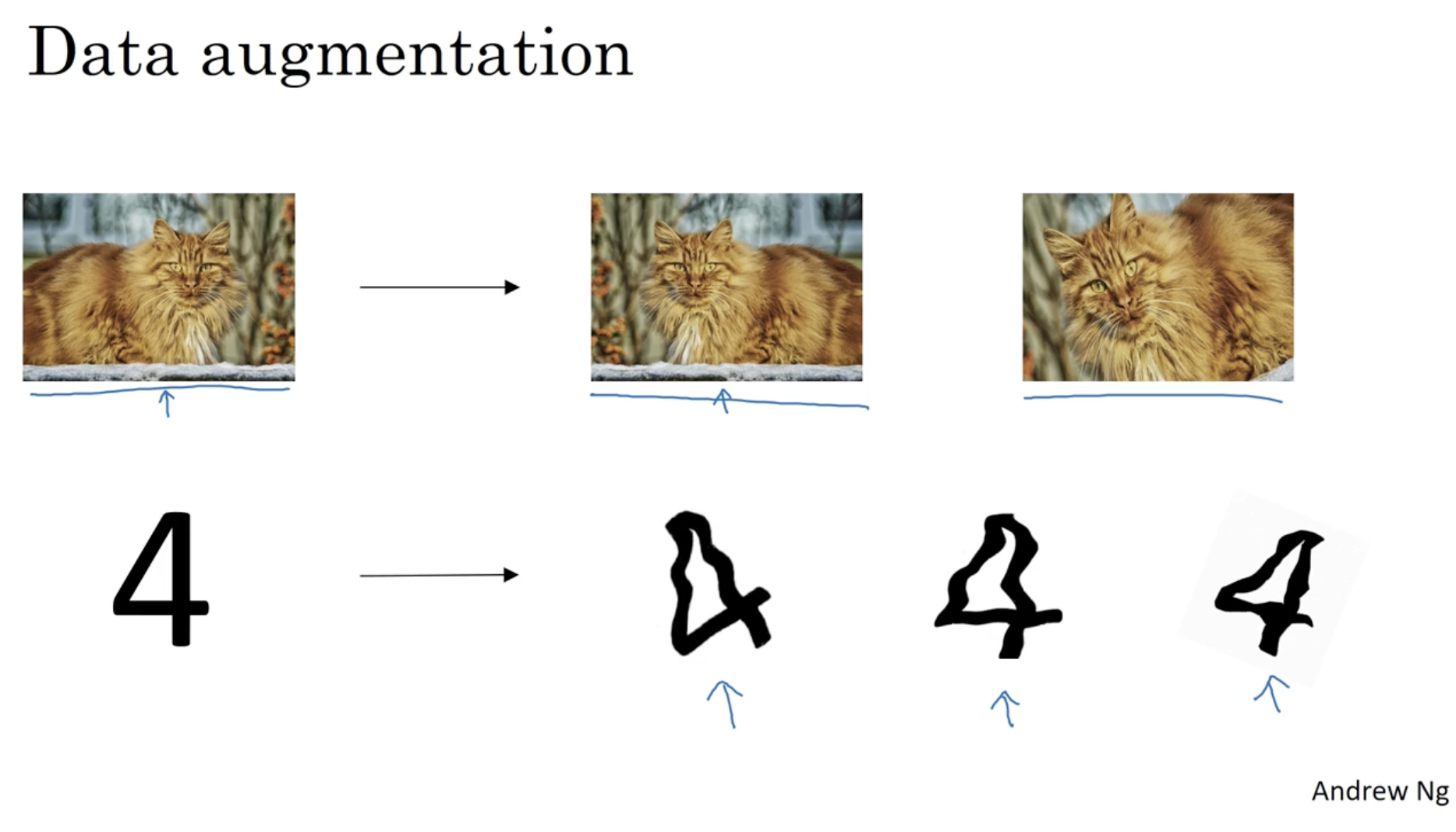
- 일반적으로 학습 데이터를 추가함으로써 overfitting을 방지할 수 있다.
- 하지만 데이터를 수집하는 것은 비용이 많이 들기 때문에 아래와 같이 기존의 데이터를 가지고 여러 데이터를 만드는 "Data Augmentation"을 적용하여 데이터를 증가시킬 수 있다.
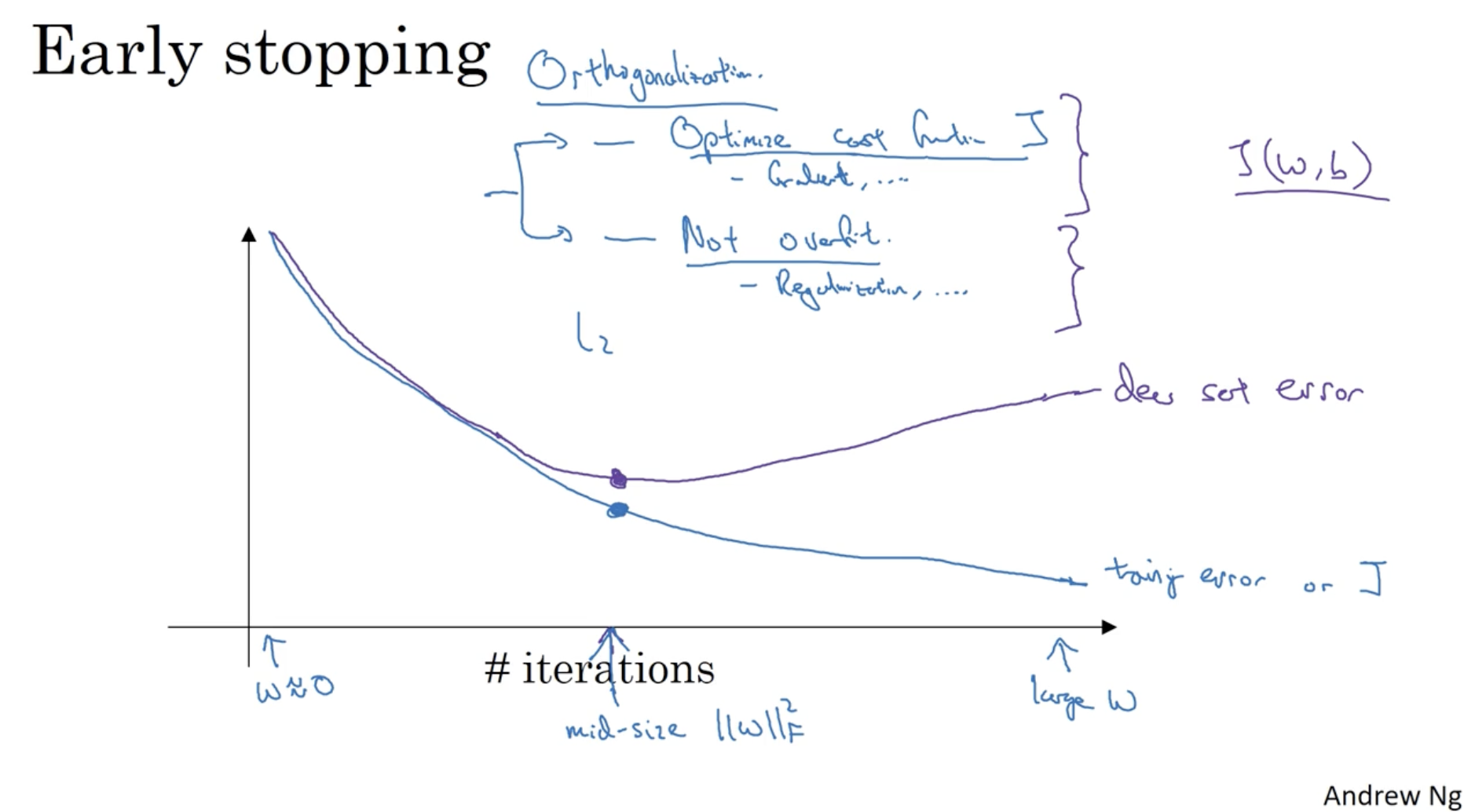
일반적인 모델 학습을 반복함에 따른 에러 값의 그래프는 아래와 같이 나온다. 일정 반복 이후로는 dev set error가 증가하는 모습을 보여준다.
- 따라서 dev set error가 증가하기 전에 모델 학습을 중지하는 것도 overfitting을 방지하는 방법 중 하나이다.
- 이 경우, 특별한 optimize 방법이나 regularization 방법이 적용되지는 않지만 계산 비용을 아낄 수 있다는 장점이 존재한다.
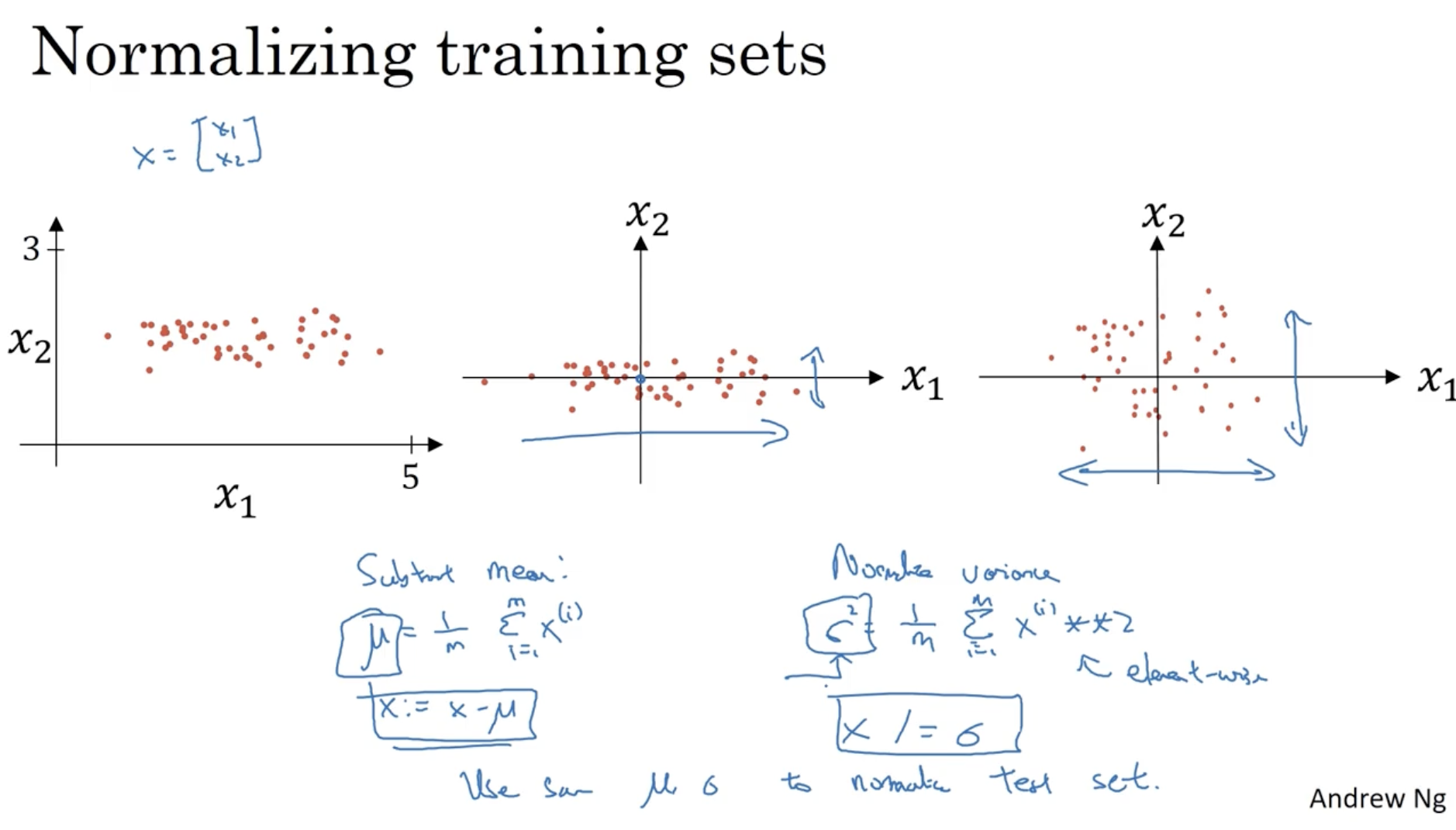
모델을 효과적으로 학습하기 위해서는 입력 데이터의 normalization이 필요하다.
- ex.
- 그리고 train set에서 적용된 를 test set에 대해서도 동일하게 적용한다.
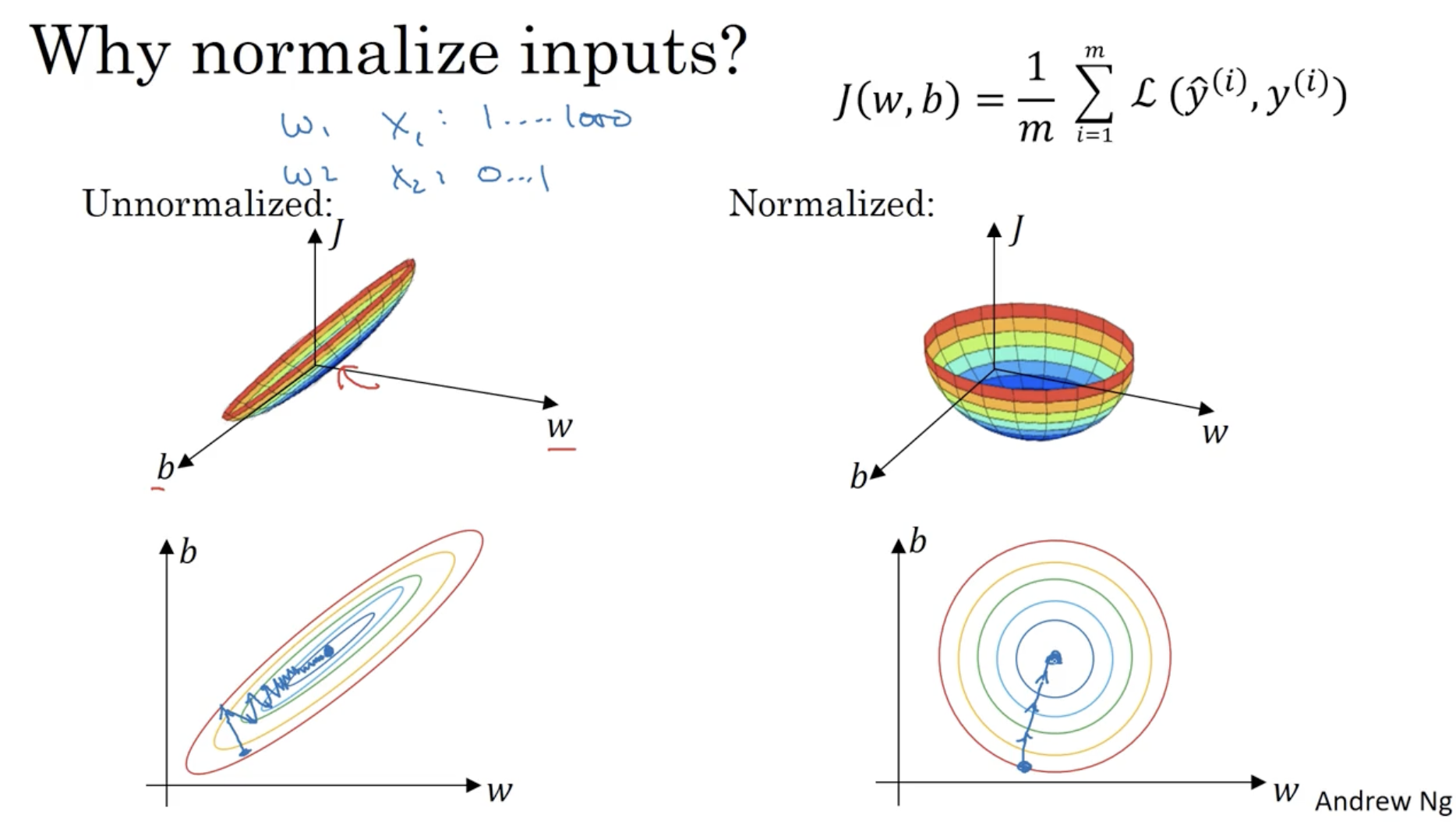
cost function 는 파라미터 에 따라 값이 변한다.
- 따라서 만약 input data normalization이 적용되지 않을 경우, 좌측처럼 특정 파라미터에 의해서만 값이 크게 변하고, 다른 파라미터에 대해서는 값의 변화가 거의 없는 것처럼 나올 수 있다. 이처럼 unblanced한 cost function에 대하여 gradient descent alg.을 적용하면 gradient의 스텝이 이상하게 나타날 수 있다.
- 반면에 우측처럼 normalization을 적용하면, balanced한 cost function이 나타날 것이며, gradient descent를 적용하면 균형잡힌 방향으로 global optima를 찾을 것이다.
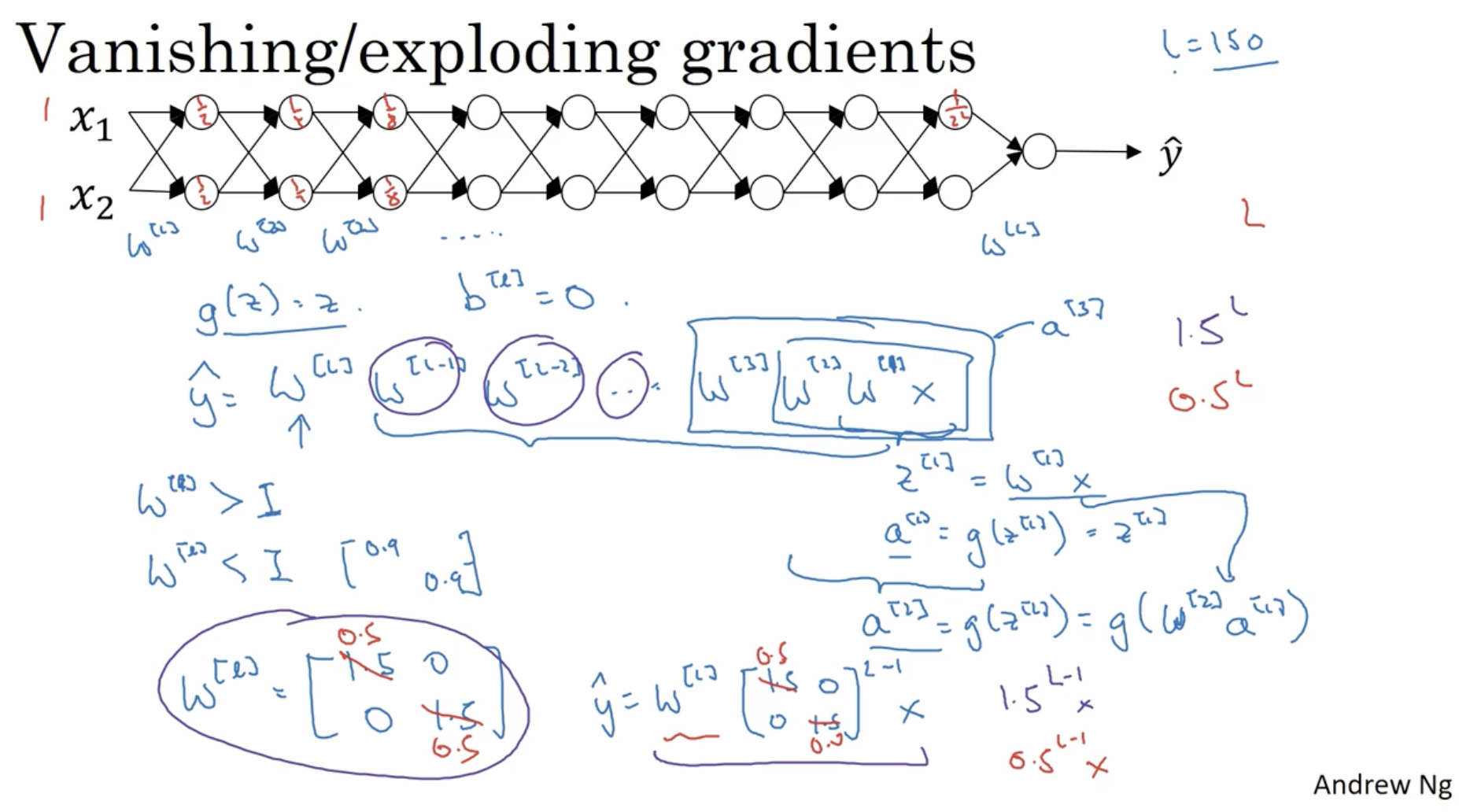
gradient descent를 적용할 때, gradient가 0에 가까워지거나 혹은 exponential하게 커지는 경우가 있다.
- 예를 들어 activation function은 와 같고, 이라고 가정해보자.
- 이 경우 이면 의 값은 exponential하게 증가할 것이고,
- 이면 의 값은 0에 가까워져 소멸할 것이다.
- 이 문제는 뉴럴넷의 고질적인 문제점이다. 따라서 적정한 로 초기화해야 한다.
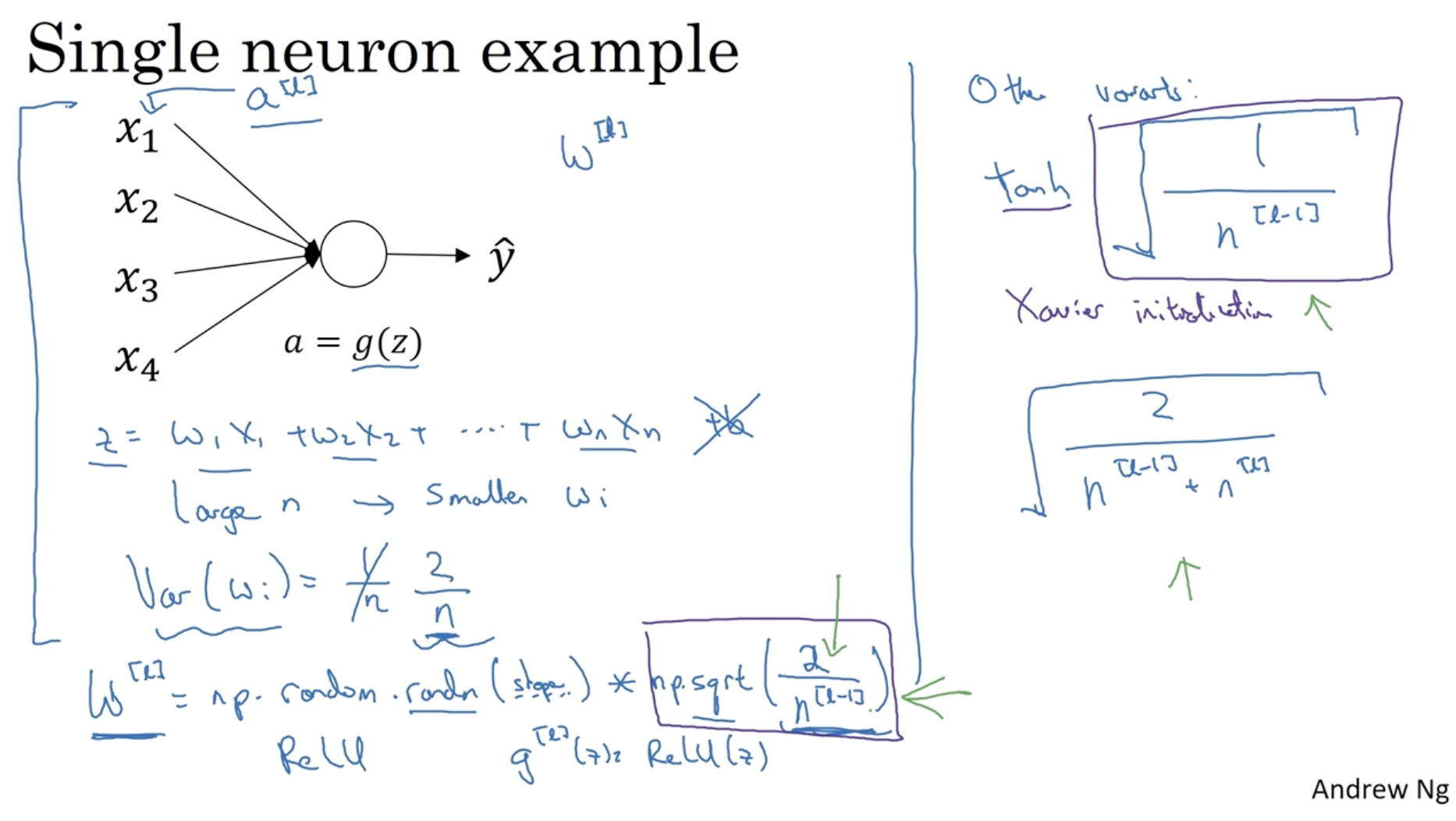
single neuron을 예로 들어보자.
- 아래와 같이 과 같이 나올 것이다. ( 가정)
- 따라서 이 커지면 그 만큼 항이 늘어나게 되고, 값이 증가하는 것을 막기 위해 는 에 반비례해서 작아질 것이다. (만약 이 작아지면 은 커진다.)
- 따라서 으로 볼 수 있다. (반비례 관계 의미)
- 다만 ReLU activation function에서는 로 적용하는 게 더 효과적이다.
- 그리하여 을 다음과 같이 초기화하면 된다.
- (in ReLU)
- (in tanh) (= Xavier initialization )
- or somthing like that. ()
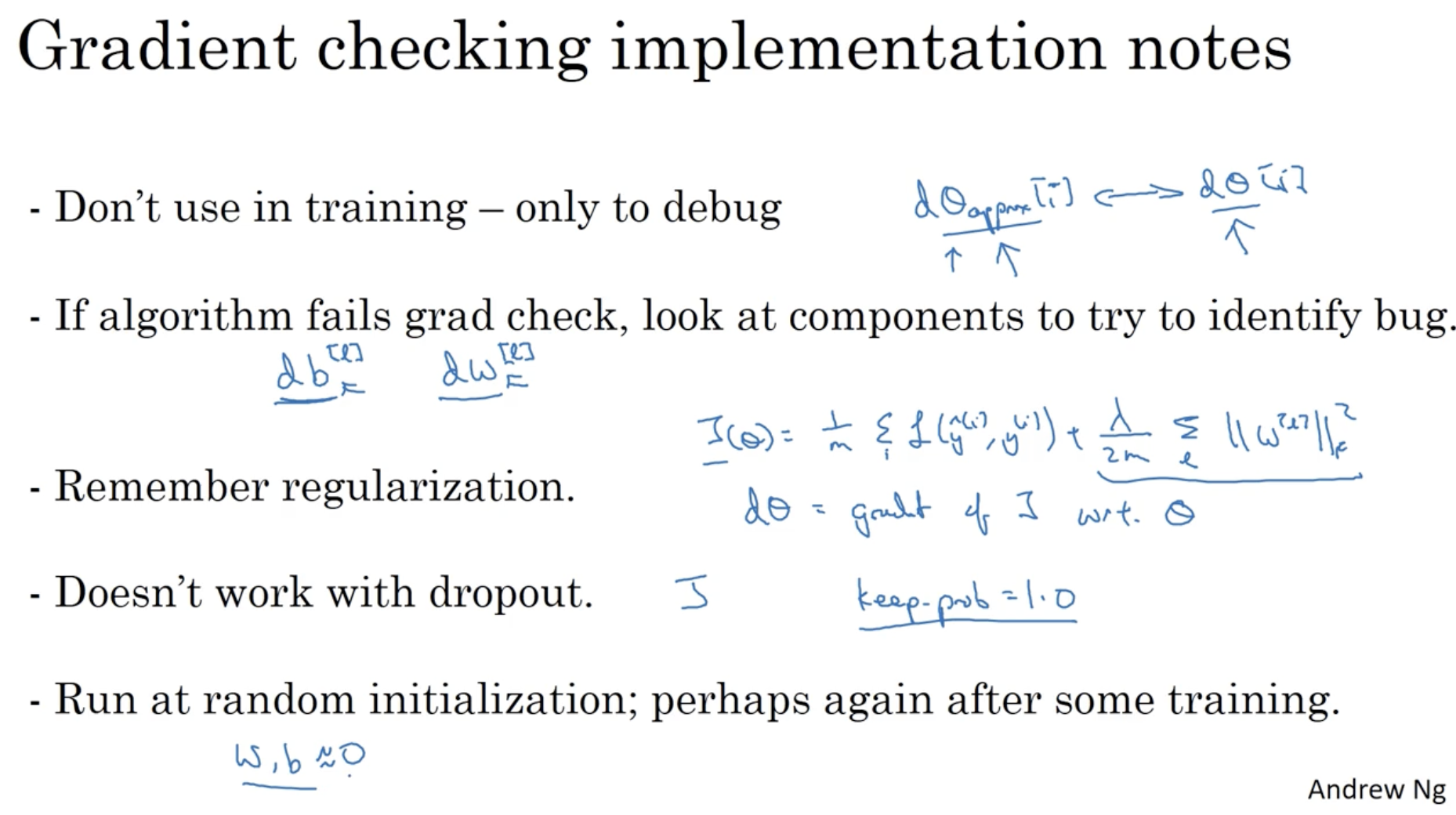
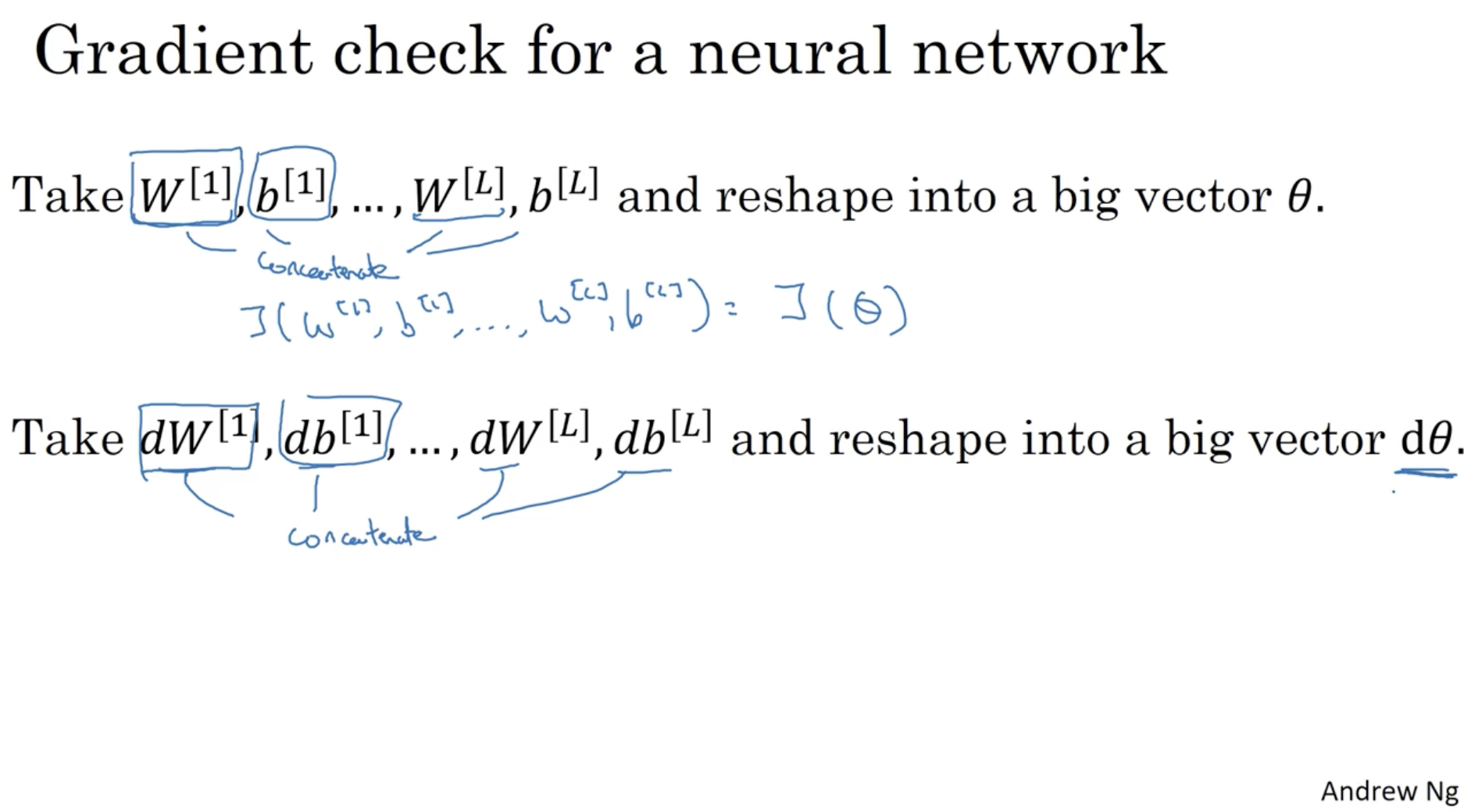
다음은 gradient를 체크하는 방법(gradient checking)이다. 즉, 기울기가 올바르게 나온다는 것을 증명하는 방법이다.
- 우선 를 로 를 로 하여 하나로 묶는다.(concatenate)
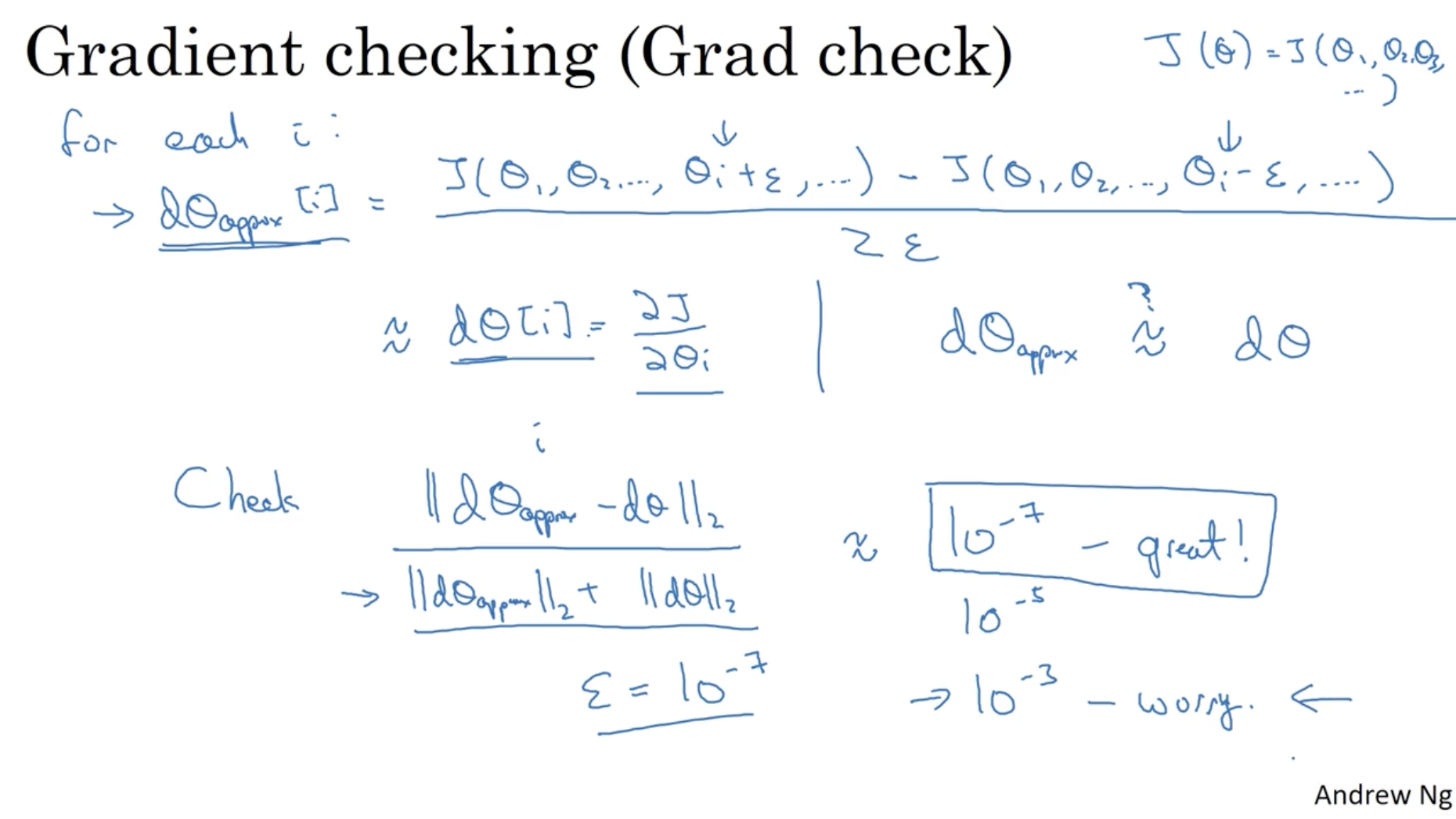
다음으로 하나의 에 대하여 값을 더하고 빼서, 기울기 값을 구하여 이를 에 저장한다.
그리고 backpropagation에서 구한 와 를 유클리드 거리로 비교하여 차이값을 통해 backpropagation에서 구한 기울기가 올바르다는 것을 증명할 수 있다.
- 따라서 grad checking을 통해 디버깅할 수 있다.
grad checking의 주요 고려 사항은 다음과 같다.