출처 : https://www.coursera.org/specializations/deep-learning
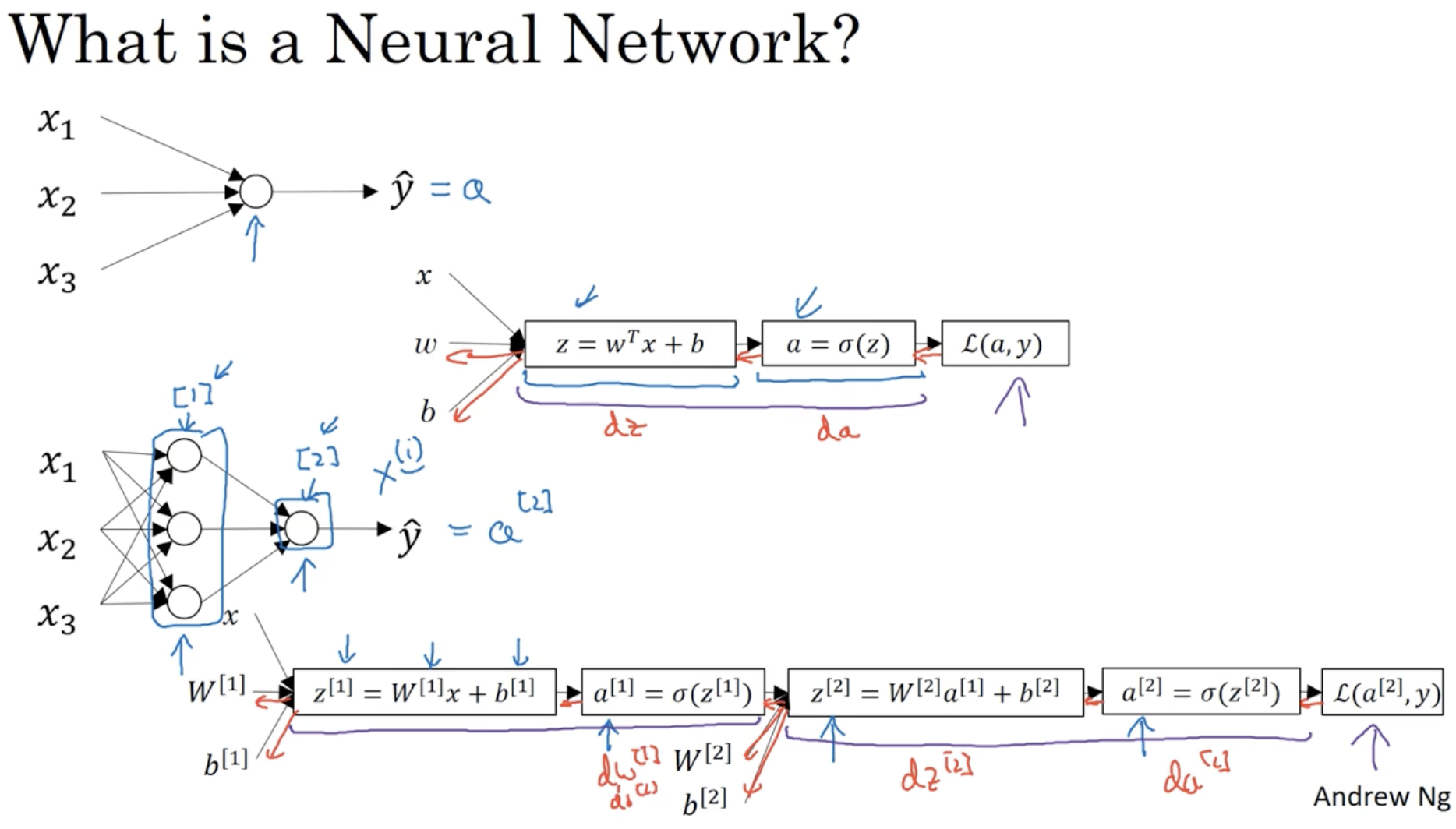
neural network의 개요는 다음과 같다.
- 이전에 봤던 Logistic regression을 여러 layer로 합친 것이라고 생각하면 편하다.
- 3개의 unit를 갖는 unit vector a[1]를 만든다.
- z[1]=W[1]x+b[1]
- a[1]=σ(z[1])
- unit 벡터 a[1]을 가지고 다음 unit vector a[2]를 구한다.
- z[2]=W[2]a[1]+b[2]
- a[2]=σ(z[2])
- 최종 값 a[2]=(y^)를 가지고 Loss function L(a[2],y)를 구한다.
- 그리고 위 과정은 forward propagation에 해당하며, back propagation을 적용하여 미분값을 구한 후 gradient descent alg.을 적용한다.
- da[2]=∂a[2]∂L(a[2],y)
- dz[2]=∂z[2]∂L(a[2],y)=da[2]×∂z[2]∂a[2]
- dw[2]=dz[2]×∂w[2]∂z[2]
- db[2]=dz[2]×∂b[2]∂z[2]
- ...
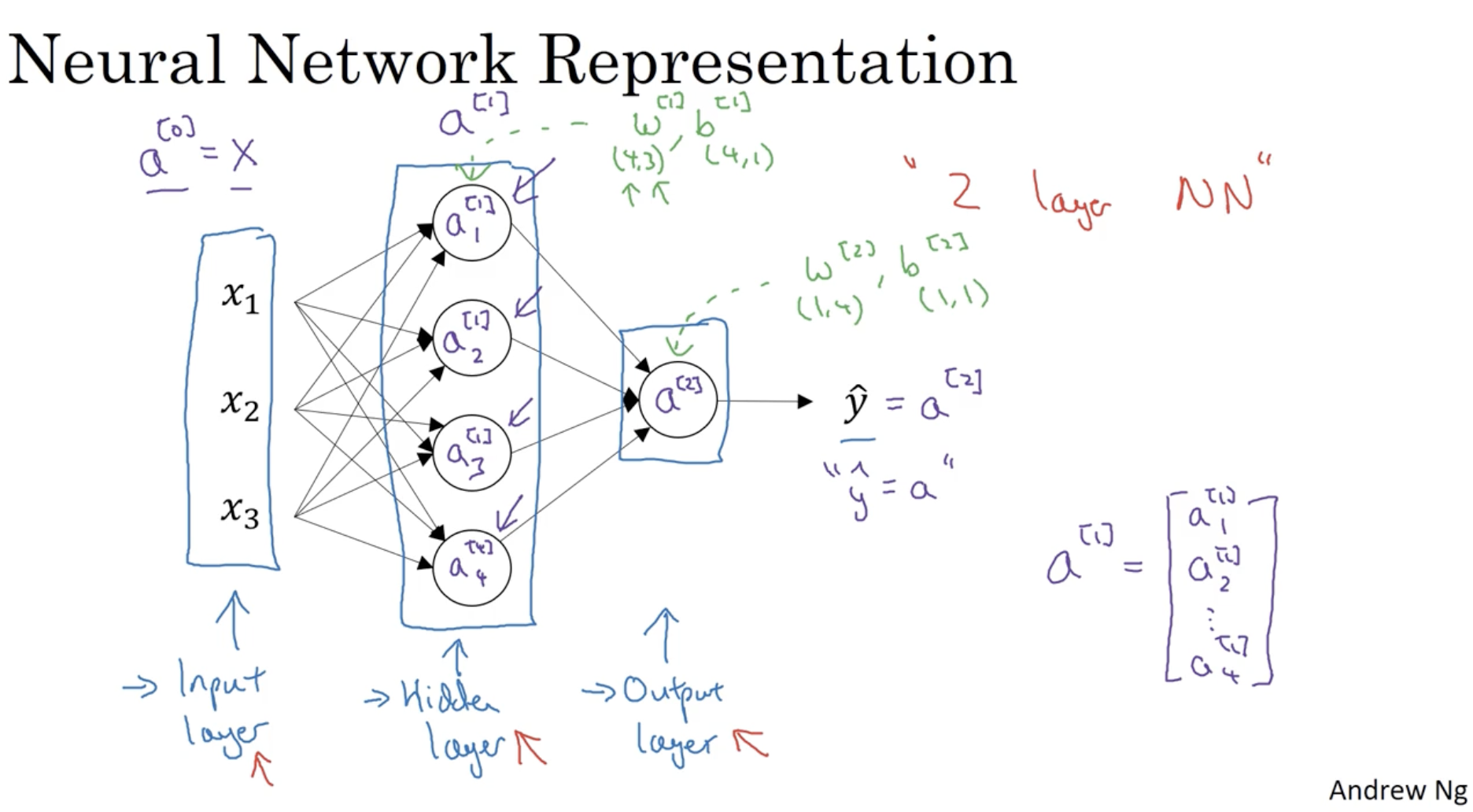
hidden layer가 1차원인 Neural Network의 구조는 아래와 같다.
- 먼저 입력 데이터 x=⎣⎢⎡x1x2x3⎦⎥⎤를 a[0]=x로 본다.
- 다음으로 W[1],b[1]를 가지고 다음 레이어의 유닛 벡터 a[1]을 구한다.
- 다음 레이어의 유닛 수에 따라 W[1],b[1]의 차원이 결정된다.
- 마지막으로 W[2],b[2]를 가지고 마지막 레이어의 유닛 벡터 a[2]를 구한다.
- 마찬가지로 마지막 레이어의 유닛 수에 따라 W[2],b[2]의 차원이 결정된다.
- 따라서 최종 예측값 y^=a[2](=a)를 구한다.
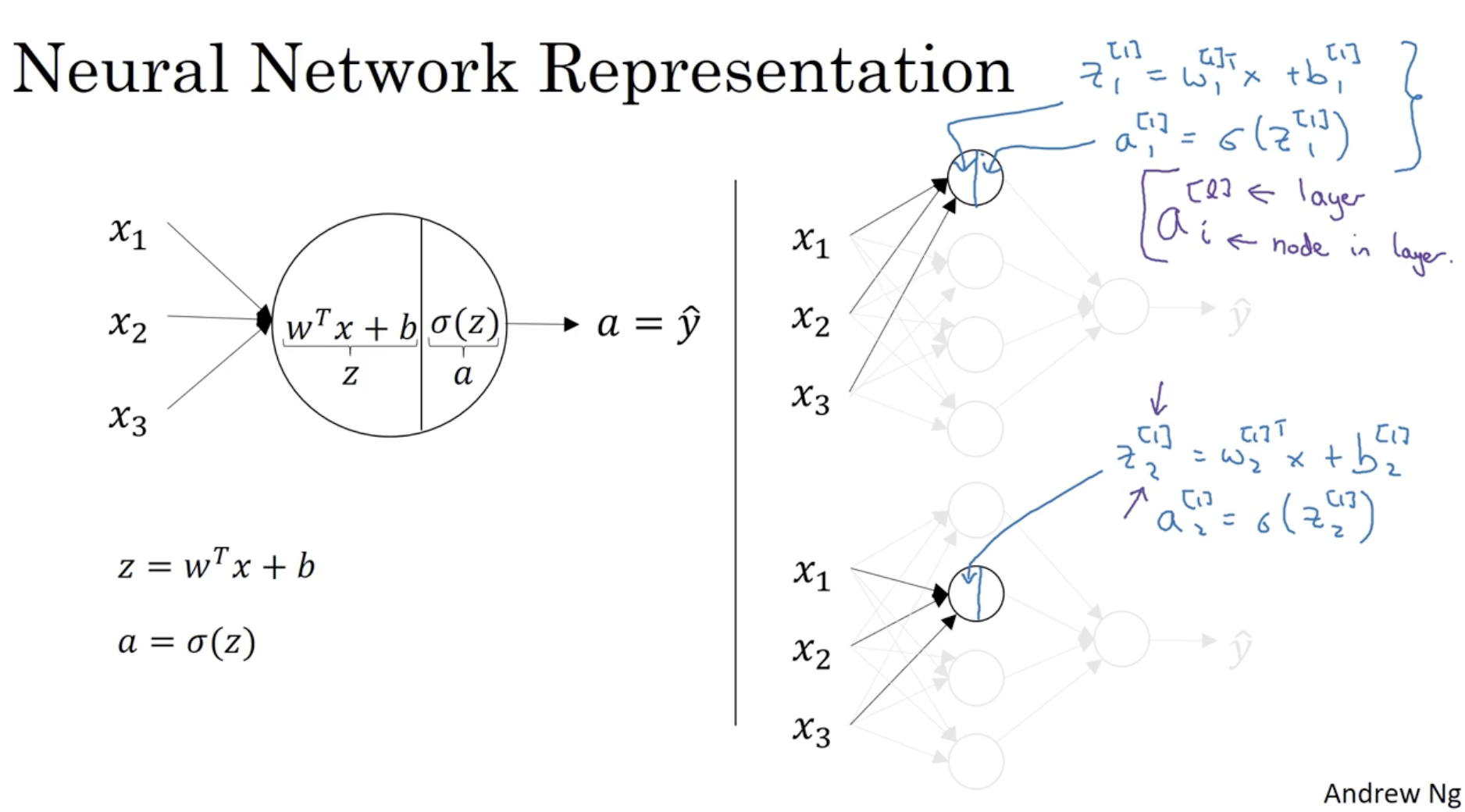
구체적으로 하나의 입력 데이터 x에 대해서 neural network가 어떤 식으로 동작하는 지 알아보자.
- z=wTx+b
- w∈Rn×1,x∈Rn×1,b∈R
- z∈R
- a=σ(z)
- 위 수식을 그대로 적용하여 각각의 hidden layer unit a1[1],a2[1],a3[1],a4[1]를 구할 수가 있다.
- ai[l] : l은 layer를 의미, i는 node를 의미.
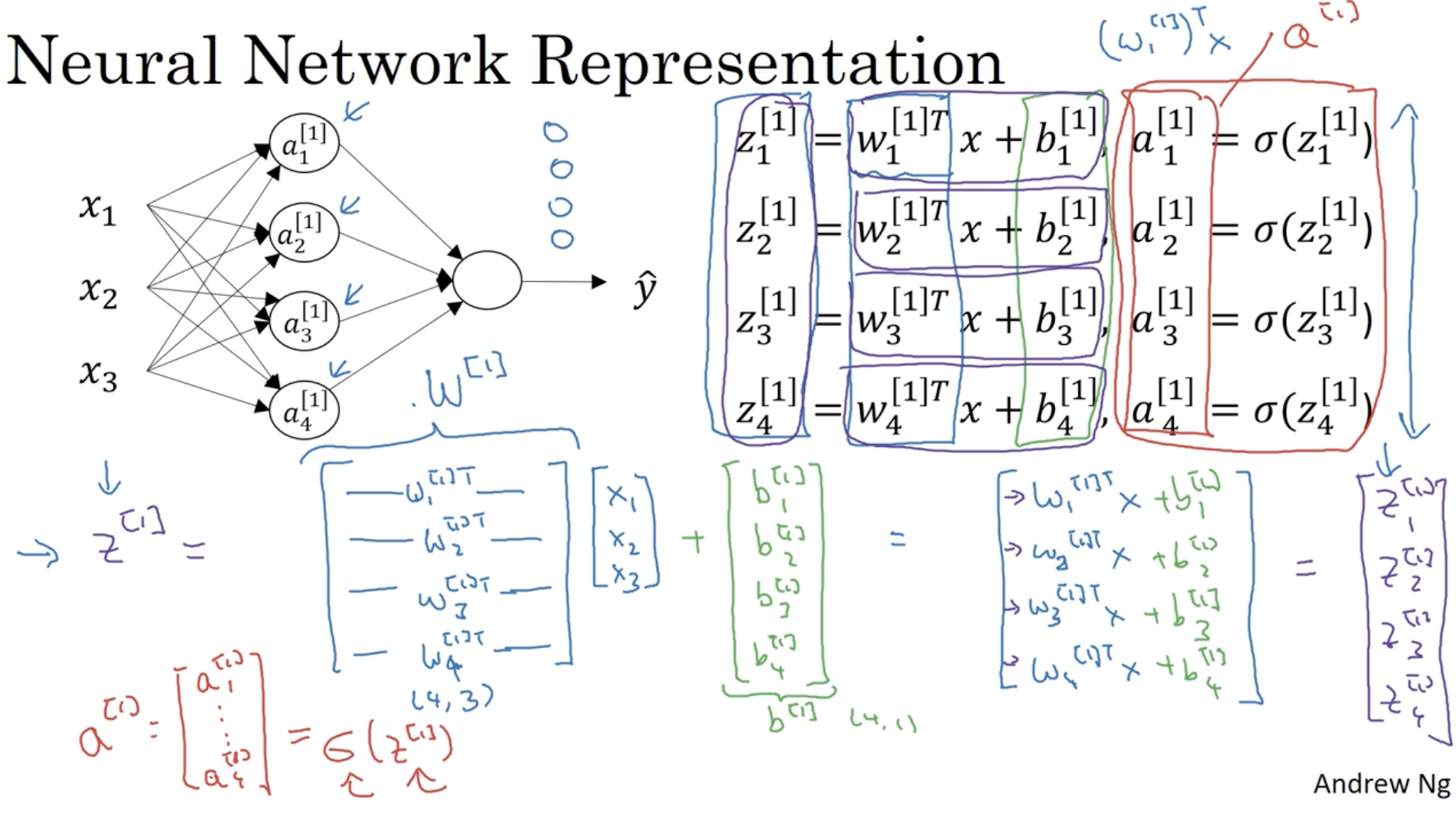
따라서 구체적으로 다 계산을 해보면 아래와 같은 결과를 얻을 수가 있다. (1번 레이어를 기준으로 본다.)
(z1[1],a1[1],...,z4[1],a4[1])
그리고 이를 일일이 계산하는 것이 아니라 vectorization을 적용하면 아래와 같다.
- W[1]=⎣⎢⎢⎢⎢⎡−(w1[1])T−−(w2[1])T−−(w3[1])T−−(w4[1])T−⎦⎥⎥⎥⎥⎤∈R4×3, x=⎣⎢⎡x1x2x3⎦⎥⎤∈R3×1, b[1]=⎣⎢⎢⎢⎢⎡b1[1]b2[1]b3[1]b4[1]⎦⎥⎥⎥⎥⎤∈R4×1
- z[1]=⎣⎢⎢⎢⎢⎡z1[1]z2[1]z3[1]z4[1]⎦⎥⎥⎥⎥⎤∈R4×1, a[1]=⎣⎢⎢⎢⎢⎡a1[1]a2[1]a3[1]a4[1]⎦⎥⎥⎥⎥⎤∈R4×1
- 따라서 식을 정리하면 다음과 같다.
- z[1]=W[1]x+b[1]
- a[1]=σ(z[1])
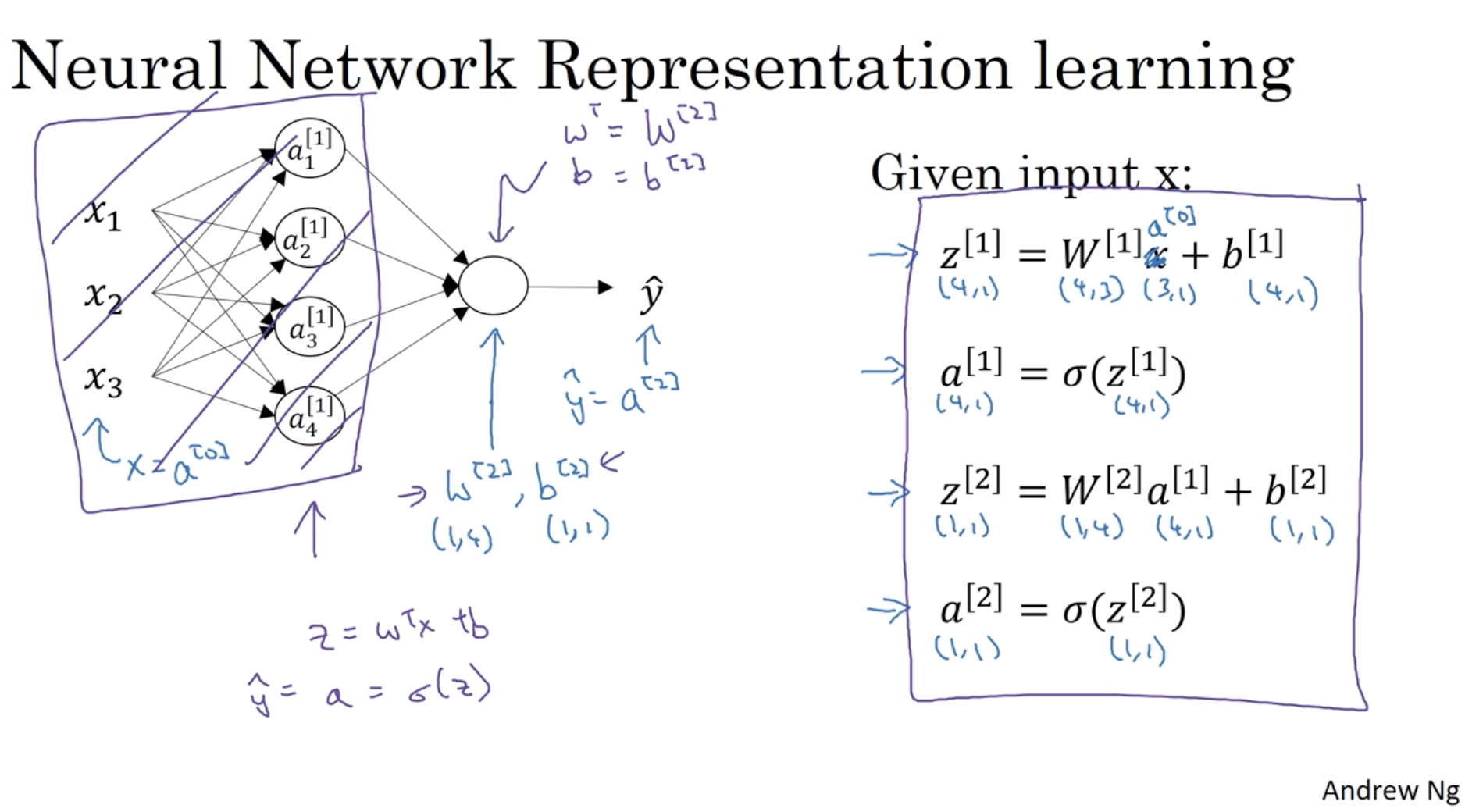
모든 레이어에 대해 깔끔하게 정리하면 아래와 같다.
- 하나의 데이터 x가 주어졌을 때.
- 1번 레이어 (hidden layer) :
- z[1]=W[1]x+b[1]
- a[1]=σ(z[1])
- 2번 레이어 (output layer) :
- z[2]=W[2]a[1]+b[2]
- a[2]=σ(z[2])
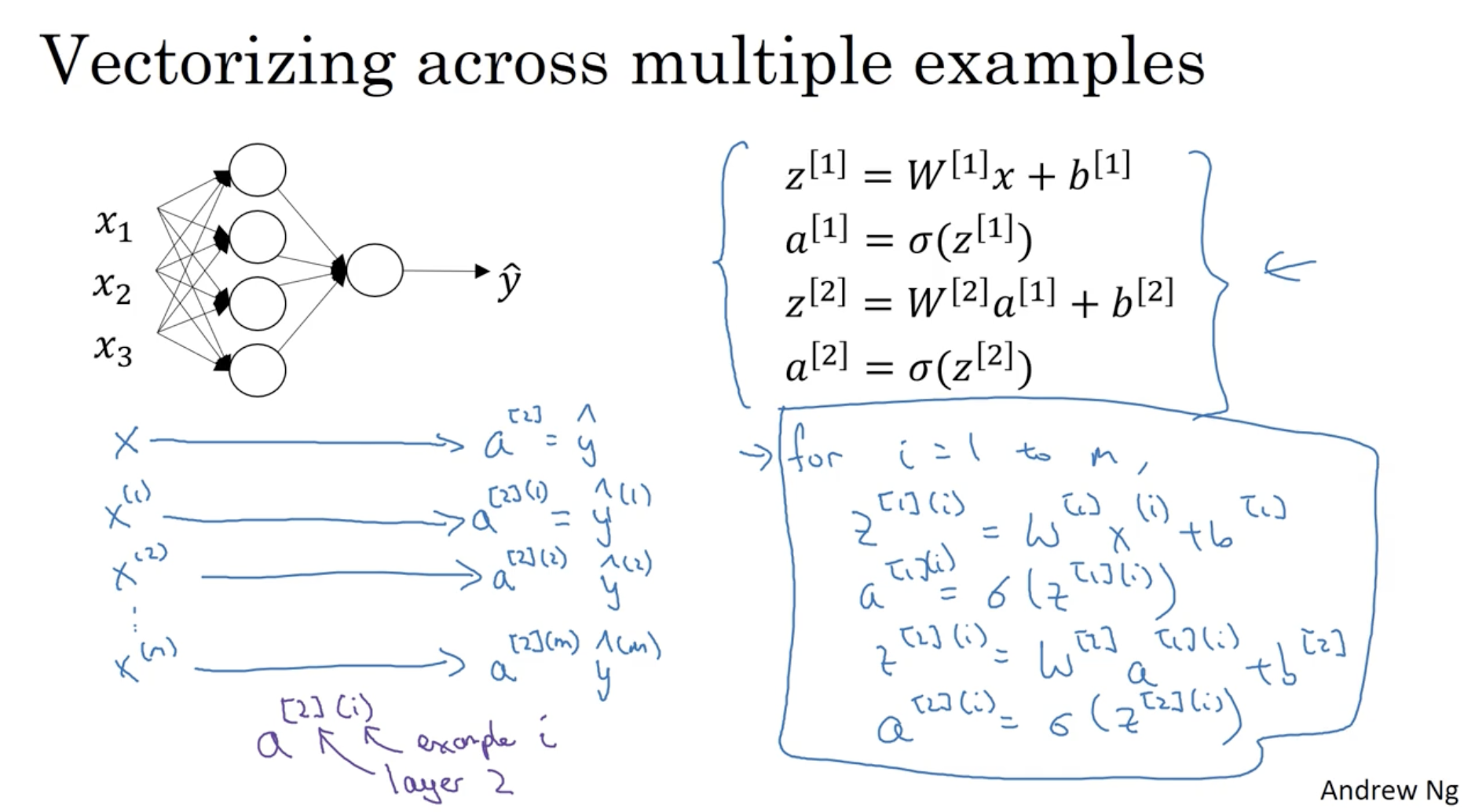
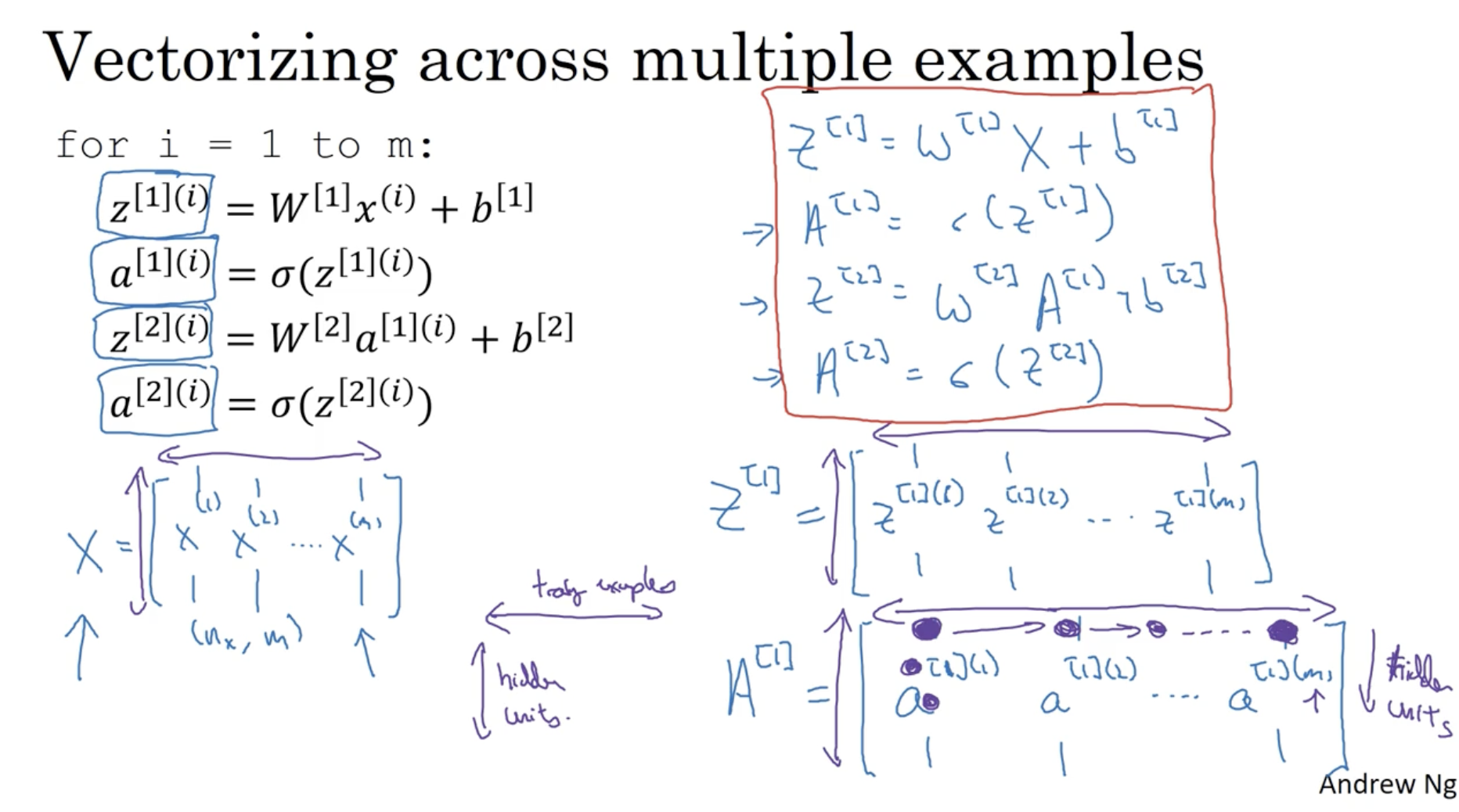
그렇다면 1개의 데이터가 아닌 여러 개의 데이터에 대해서 적용한다면 어떨까? 아래를 보자.
- 보다시피 for 문을 통해서 m개의 데이터 x(1),x(2),...,x(m)에 대해서 각각의 z[l](1),a[l](1),...,z[l](m),a[l](m)을 구하고 있음을 알 수 있다.
- 이처럼 for-loop를 통해서 구현할 경우, 연산 속도가 매우 느려질 것이다. 따라서 여기에 Vectorization을 적용한다.
Vectorization 방법은 간단하다.
- X=⎣⎢⎡∣x(1)∣∣x(2)∣.........∣x(m)∣⎦⎥⎤∈Rnx×m (X=A[0]으로 본다.)
- Z[l]=⎣⎢⎡∣z[l](1)∣∣z[l](2)∣.........∣z[l](m)∣⎦⎥⎤∈R# of hidden units×m
- A[l]=⎣⎢⎡∣a[l](1)∣∣a[l](2)∣.........∣a[l](m)∣⎦⎥⎤∈R# of hidden units×m
- 따라서 식을 정리하면 다음과 같다.
- Z[1]=W[1]X+b[1]
- A[1]=σ(Z[1])
- Z[2]=W[2]A[1]+b[2]
- A[2]=σ(Z[2])
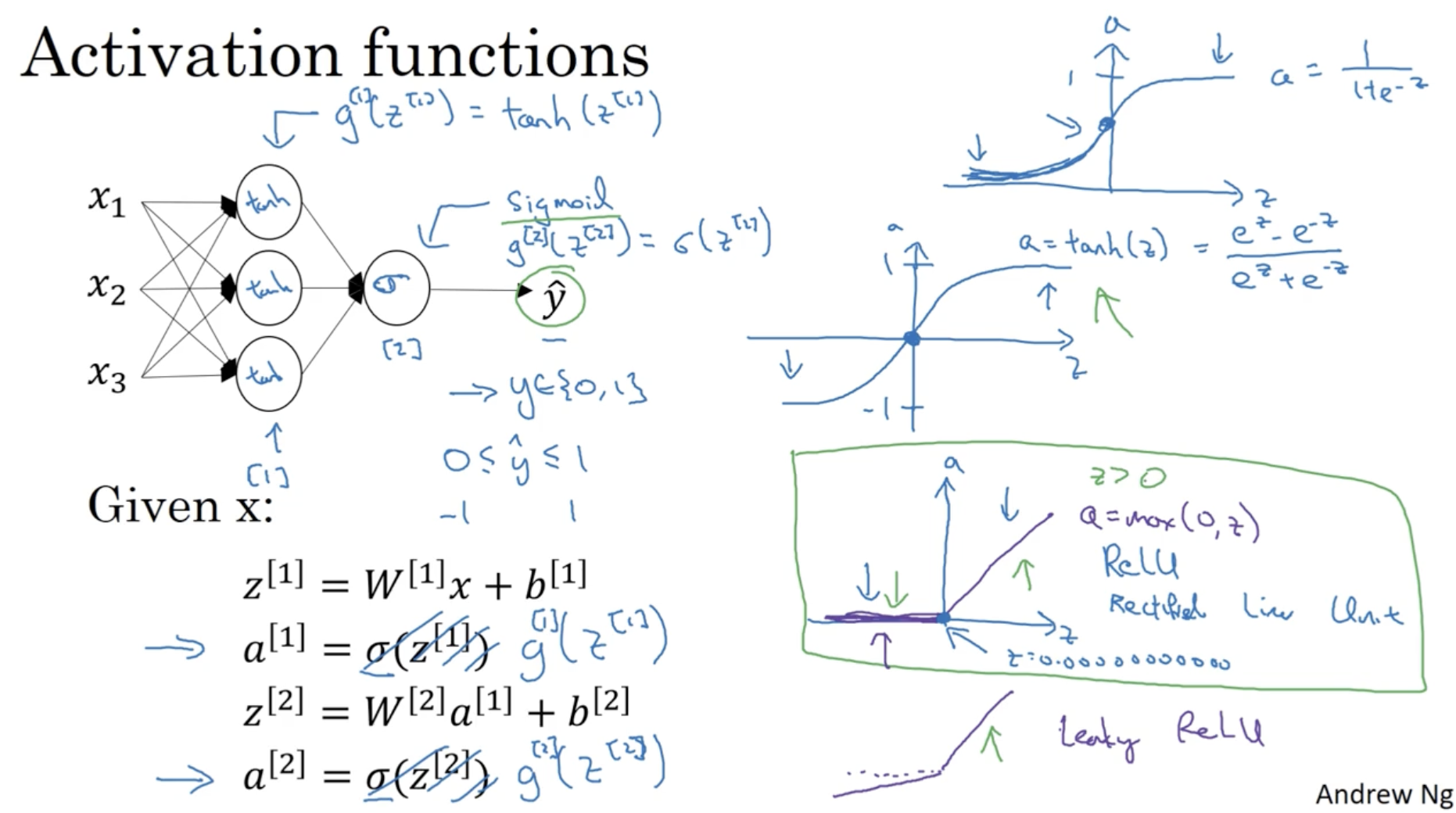
사실 Neural Networks에서 Activation function는 sigmoid뿐만 아니라 다양한 함수가 존재한다.
- sigmoid=σ(z)=1+e−z1→(0,1)
- tanh(z)=ez+e−zez−e−z→(−1,1)
- ReLU=max(0,z)→[0,∞]
- Leaky ReLU=max(0.01z,z)→[−∞,∞]
- 보통 ReLU, tanh, sigmoid 순으로 성능이 좋다. (Leaky ReLU은 추천하지 않는다.)
- 따라서 hidden layer unit의 activation function으로 ReLU를 보통 많이 사용한다.
- 하지만, 최종 output layer unit의 activation function은 (예측값인) 0 ~ 1 사이의 값을 가져야 하기 때문에 무조건 sigmoid를 사용하여야 한다.
- 레이어마다 다른 activation function을 적용할 수 있다.
l 번째 레이어의 activation function 표기 : g[l](z[l])
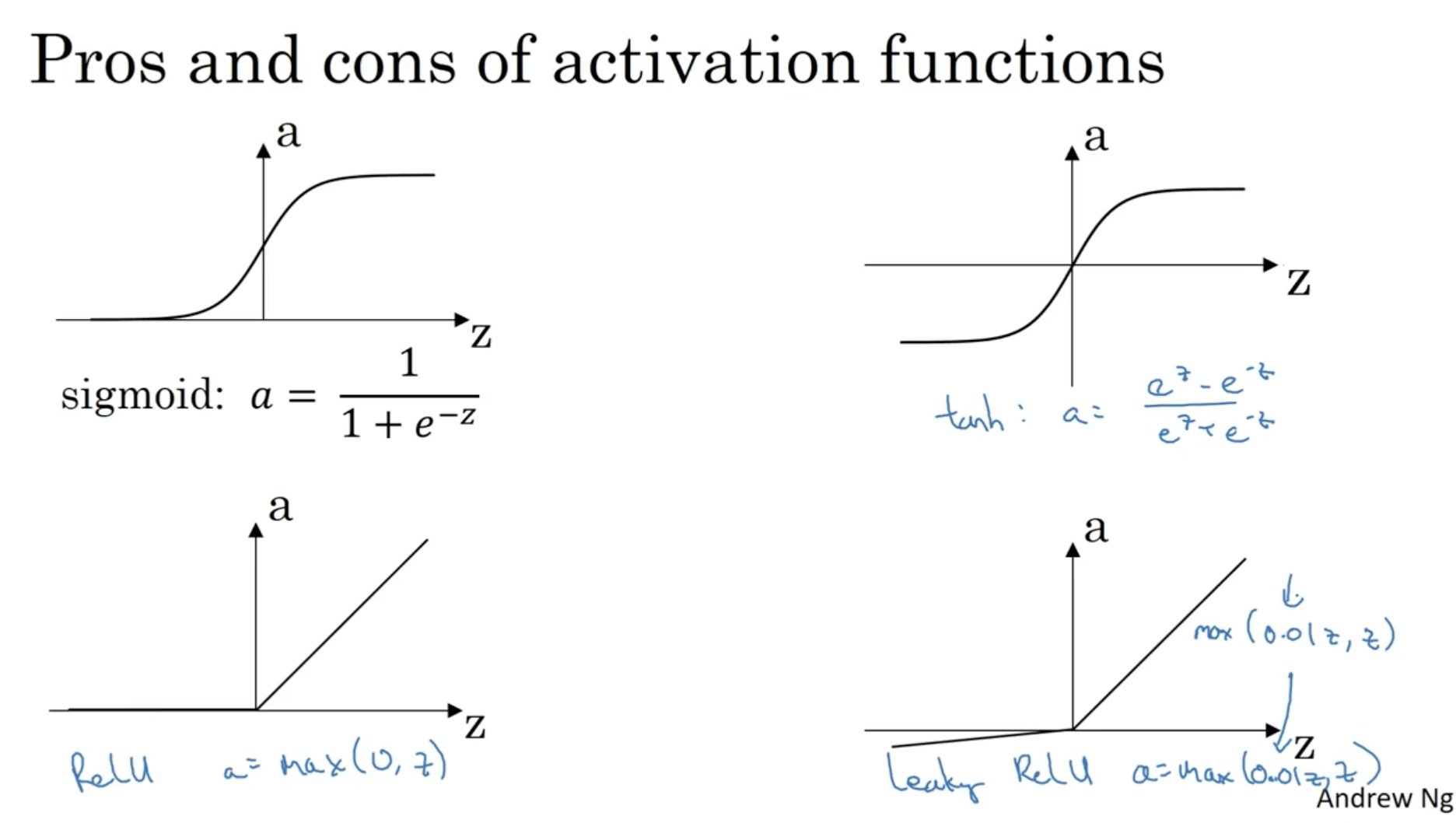
각 activation function을 그래프로 그려보면 아래와 같다.
- ReLU의 경우 0 이하의 값은 기울기 0이며, z>0일 경우에는 기울기가 1이다. 따라서 gradient descent alg. 측면에서 속도가 매우 빠르다는 장점이 있다. 따라서 해당 activation function을 가장 많이 사용한다.
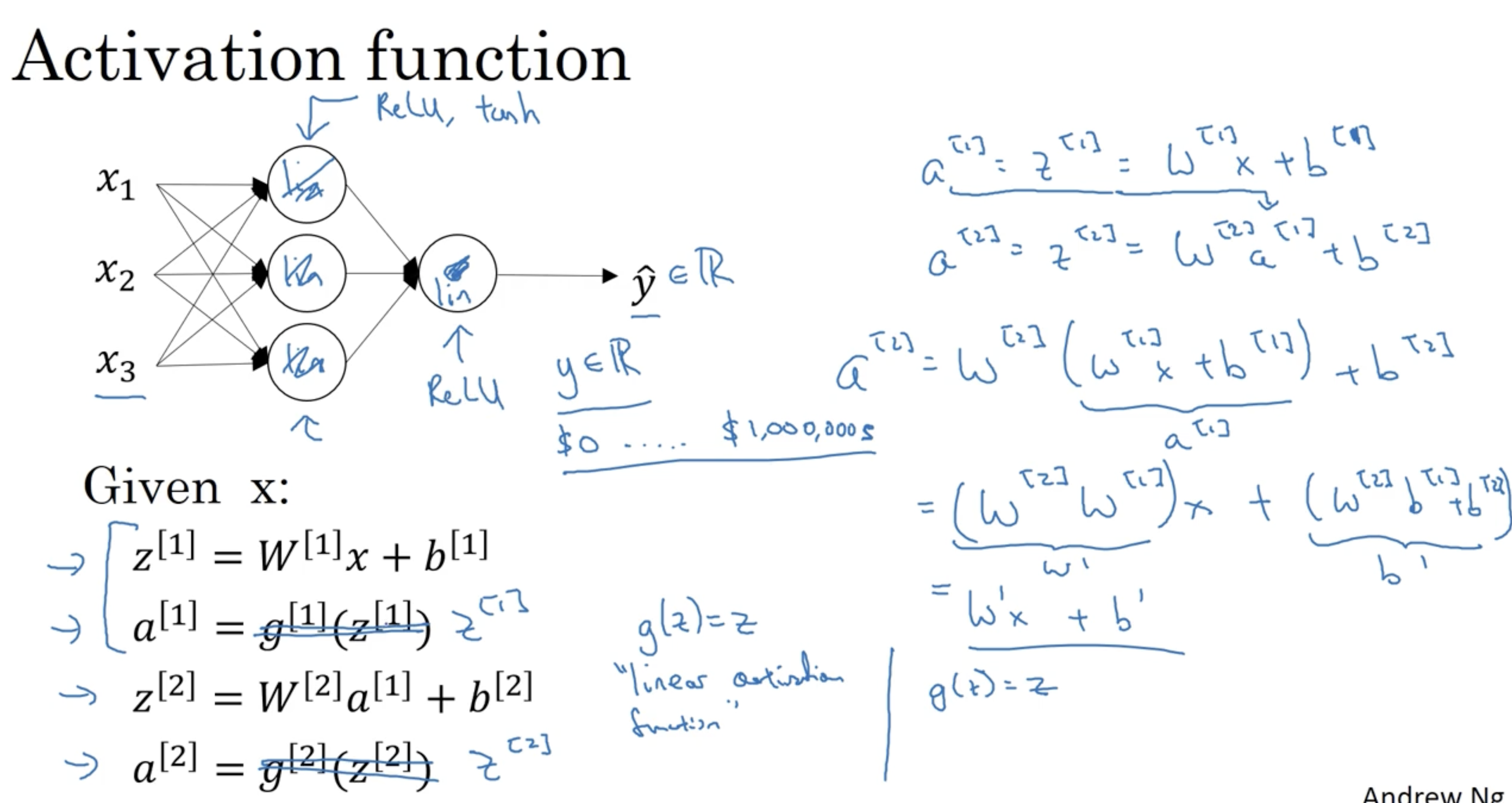
- 그렇다면 만약 g(z)=z와 같이 항상 기울기가 1이 되는 linear한 activation function을 적용하면 gradient descent 속도가 더 빨라지지 않을까? 다음 내용을 보자.
Neural Networks에서 linear function을 activation function으로 선택하지 않는 이유는
"linear activation function을 적용하면 Neural Networks의 이점이 없기 때문이다."
- 아래에서 우측 식을 보면, linear activation function (a=g(z)=z)을 적용할 경우, 모든 a[l]에 대하여 결국에는 a[l]=w′x+b와 같은 꼴로 나오게 된다. 이렇게 될 경우, 히든 레이어 간의 변별력은 없어진다.
- 아래 neural networks 구조처럼 히든 레이어 유닛에 linear activation function을 적용하고, 마지막에 sigmoid를 적용할 경우, 이는 그저 logistic regression에 불과하다. 즉, 뉴럴넷의 장점을 활용하지 못한다.
- 따라서 hidden layer unit에는 non-linear activation function이 적용되어야 한다.
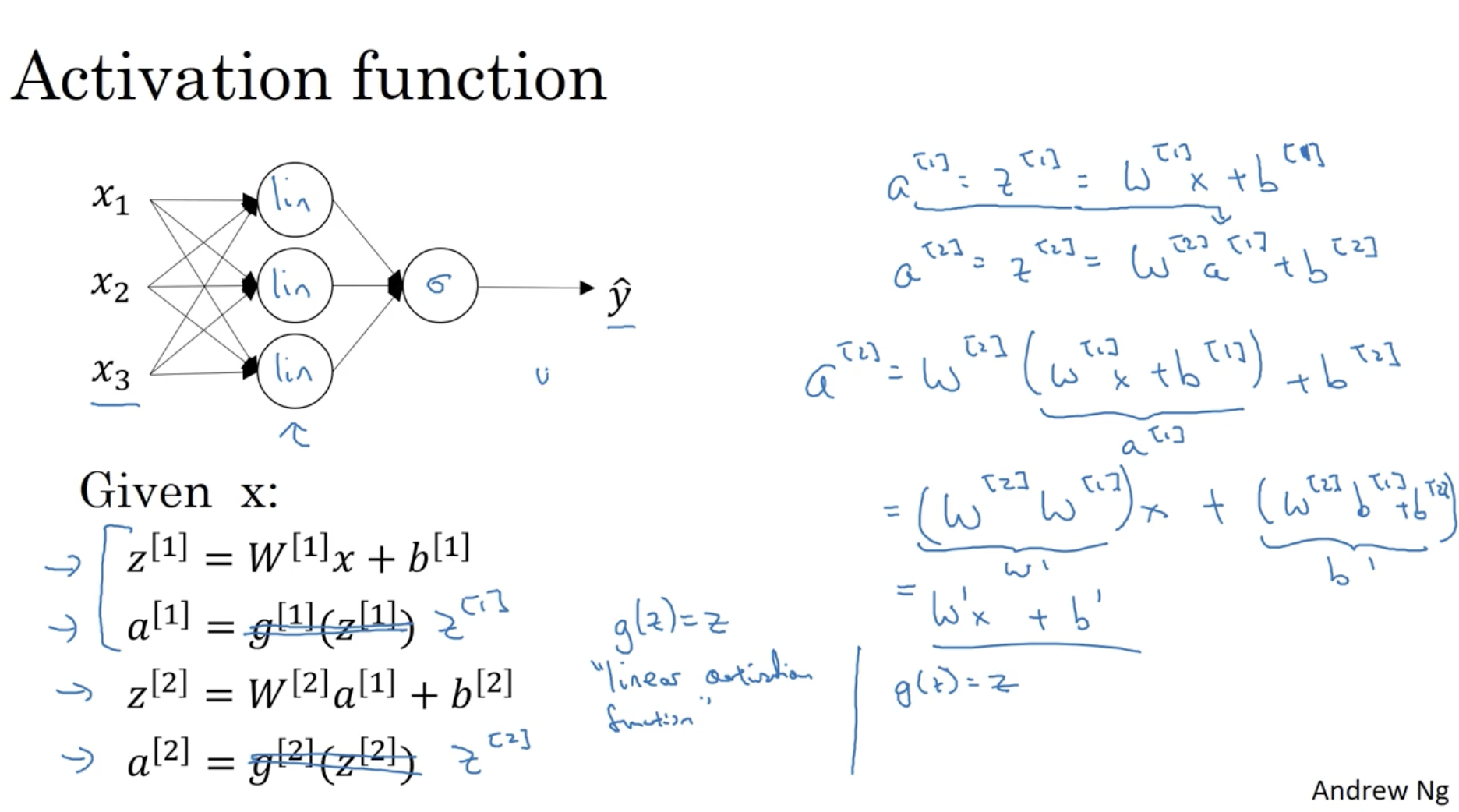
물론 아래 뉴럴넷의 구조처럼 마지막에 linear activation function (혹은 ReLU)를 적용하는 경우도 있다. 이 경우는 집 가격 예측과 같이 선형성을 띄는 경우에 해당한다. (집 가격은 무조건 0 이상이기 때문에 ReLU도 적용 가능.)
이제 각 activation function의 미분 식을 알아보자.
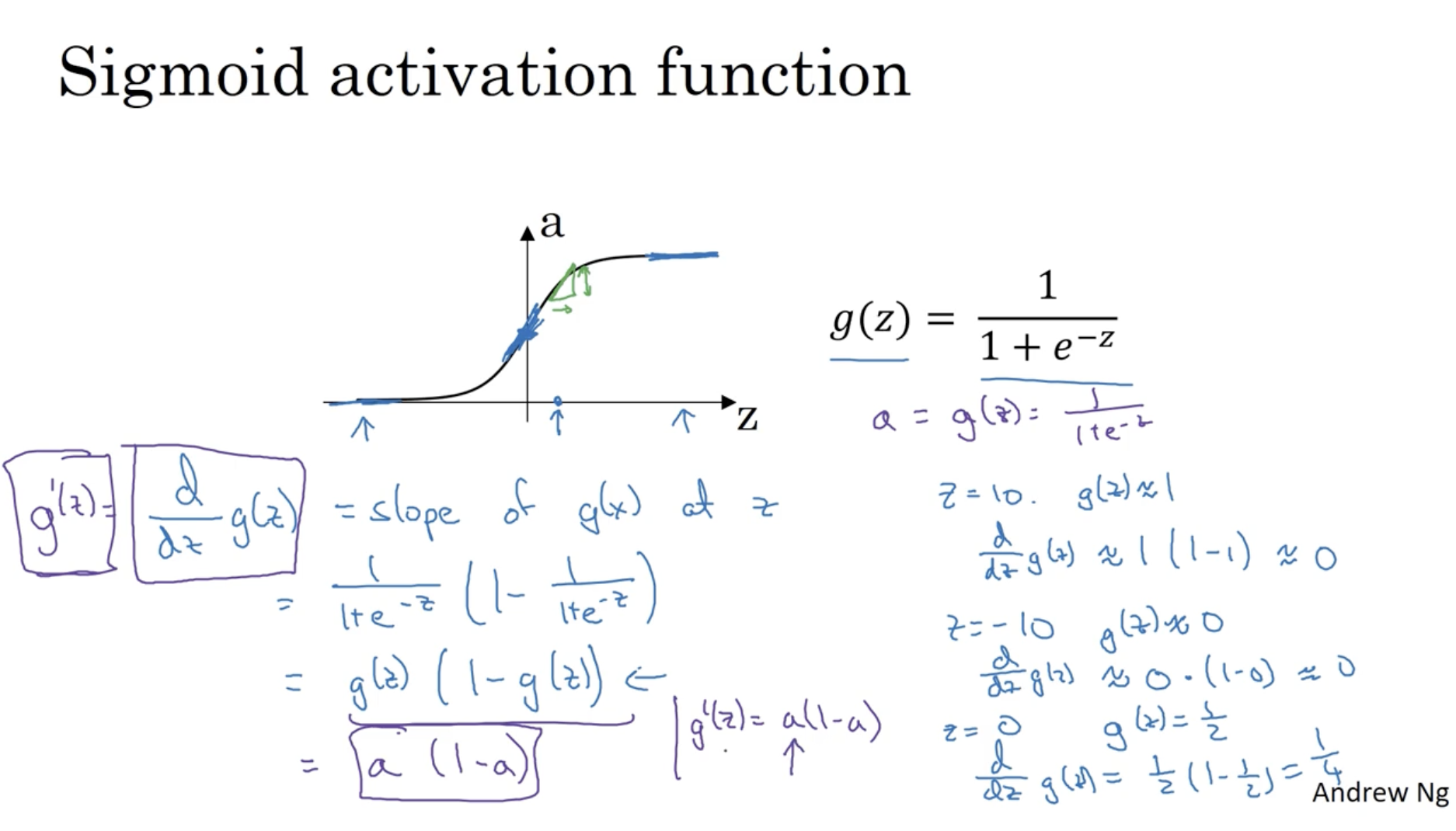
- 아래는 sigmoid 함수에 대한 미분값을 구하는 과정이다.
- sigmoid의 미분 식은 다음과 같다.
g′(z)=dzdg(z)=g(z)(1−g(z))=a(1−a)
- g′(0)=21×(1−21)=41
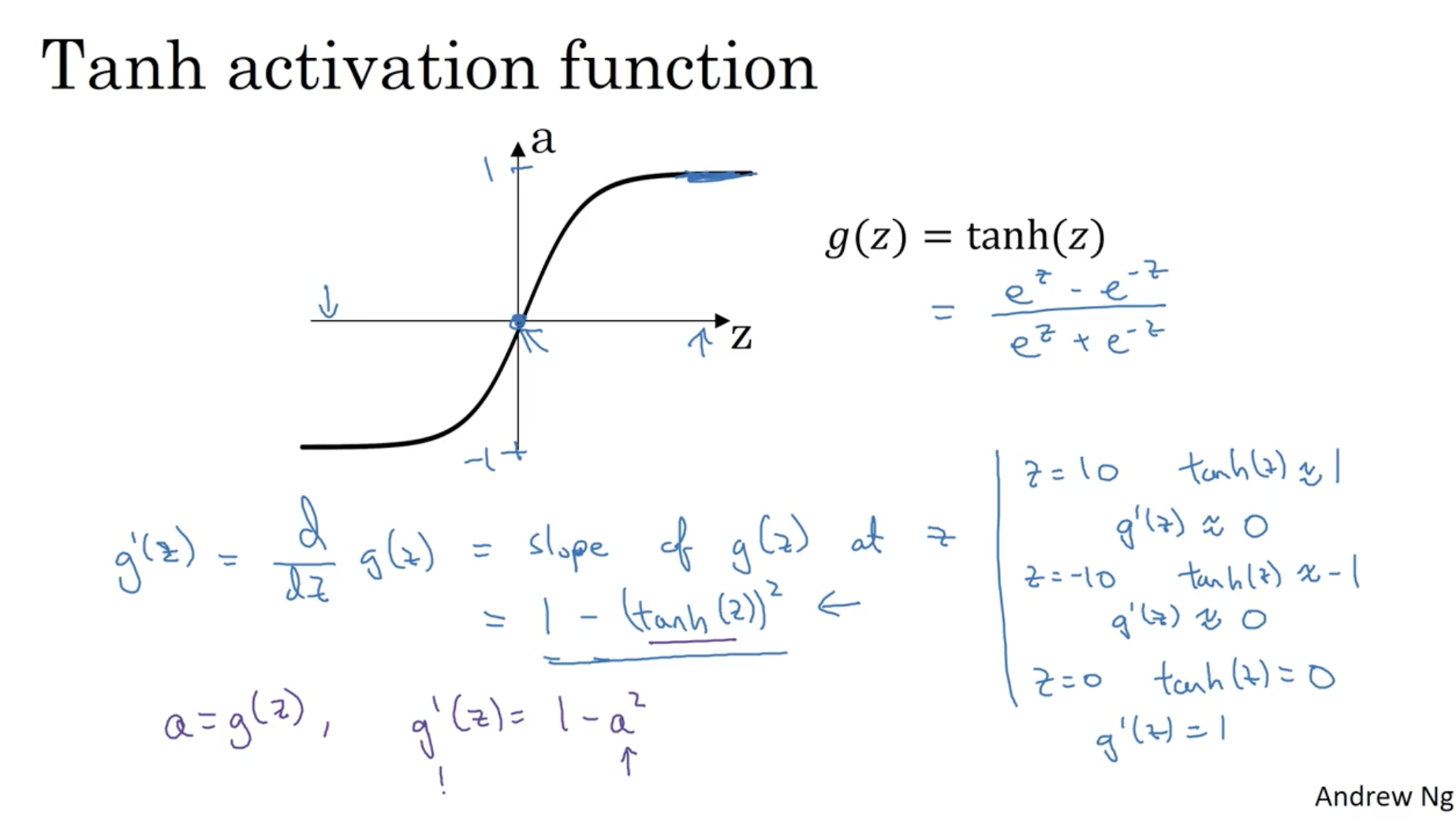
다음은 tanh의 미분값을 구하는 식이다.
- tanh의 미분 식은 다음과 같다.
g′(z)=dzdg(z)=1−(g(z))2=1−a2
- g′(0)=1−(0)2=1
다음은 ReLU와 Leaky ReLU의 미분 공식이다.
- ReLU : g′(z)={0,1,if z<0if z≥0 (컴퓨터에서는 정확히 0을 표현할 수 없기에 0일 때는 따로 고려하지 않아도 된다.)
- Leaky ReLU : g′(z)={0.01,1,if z<0if z≥0

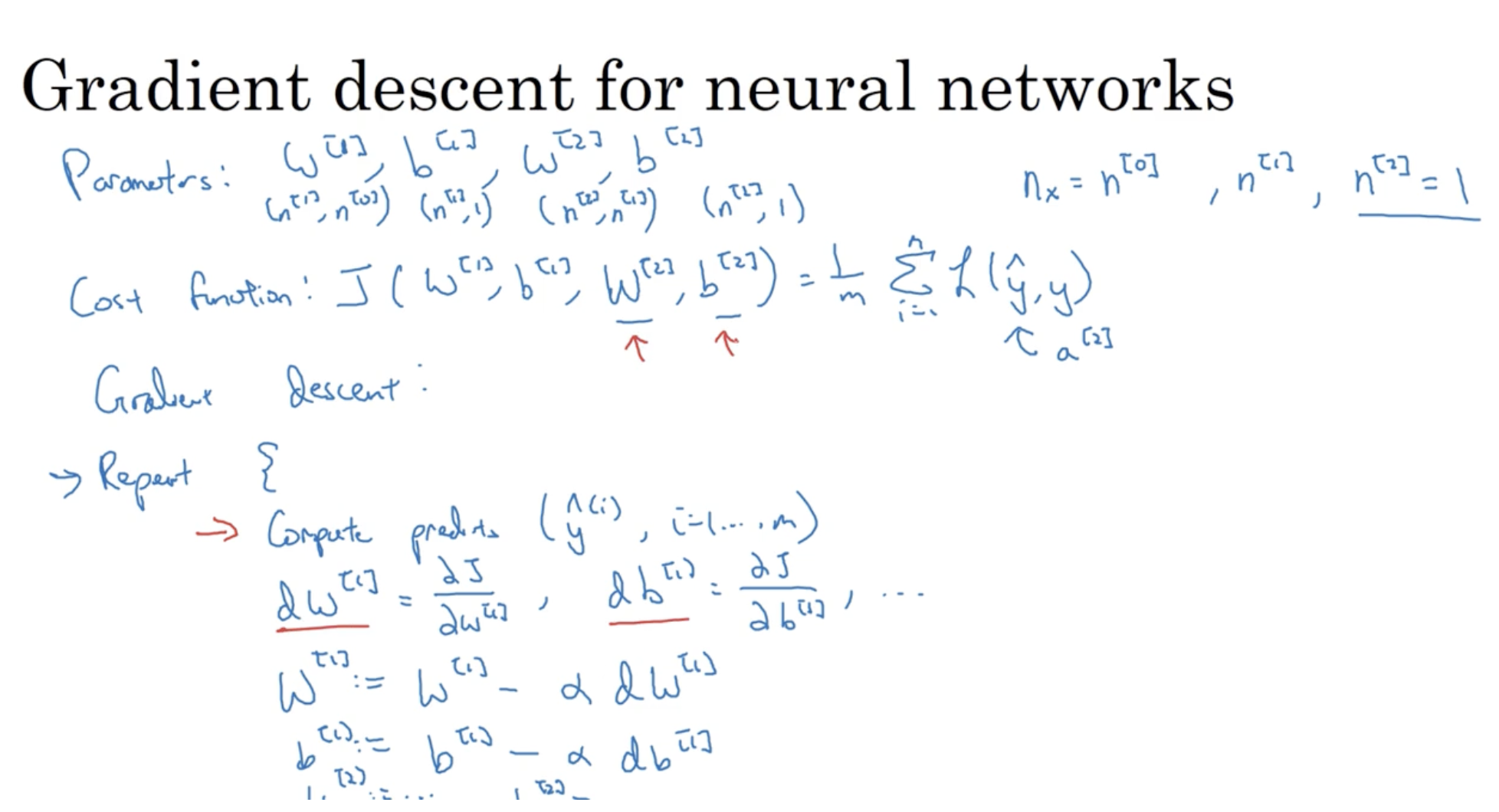
이제 Neural Network에 gradient descent를 적용하는 방법을 알아보자.
- 입력 데이터 x의 features 수는 nx=n[0]이며, hidden layer의 유닛 수는 n[1], output layer의 유닛 수는 n[2]=1이다.
- 파라미터 정보는 다음과 같다.
- W[1]∈Rn[1]×n[0]
- b[1]∈Rn[1]×1
- W[2]∈Rn[2]×n[1]
- b[2]∈Rn[2]×1
- Cost function은 다음과 같다. J(W[1],b[1],W[2],b[2])=m1∑i=1mL(y^(i),y(i))
- 따라서 gradient descent를 적용하면 다음과 같다.
- predict:(y^(1),y^(2),...,y^(m))
- dw[1]=∂W[1]∂J,db[1]=∂b[1]∂J,dw[2]=∂W[2]∂J,db[2]=∂b[2]∂J
- W[1]:=W[1]−α×dw[1]
- b[1]:=b[1]−α×bw[1]
- W[2]:=W[2]−α×dw[2]
- b[2]:=b[2]−α×bw[2]
좀더 구체적으로 적으면 다음과 같다.
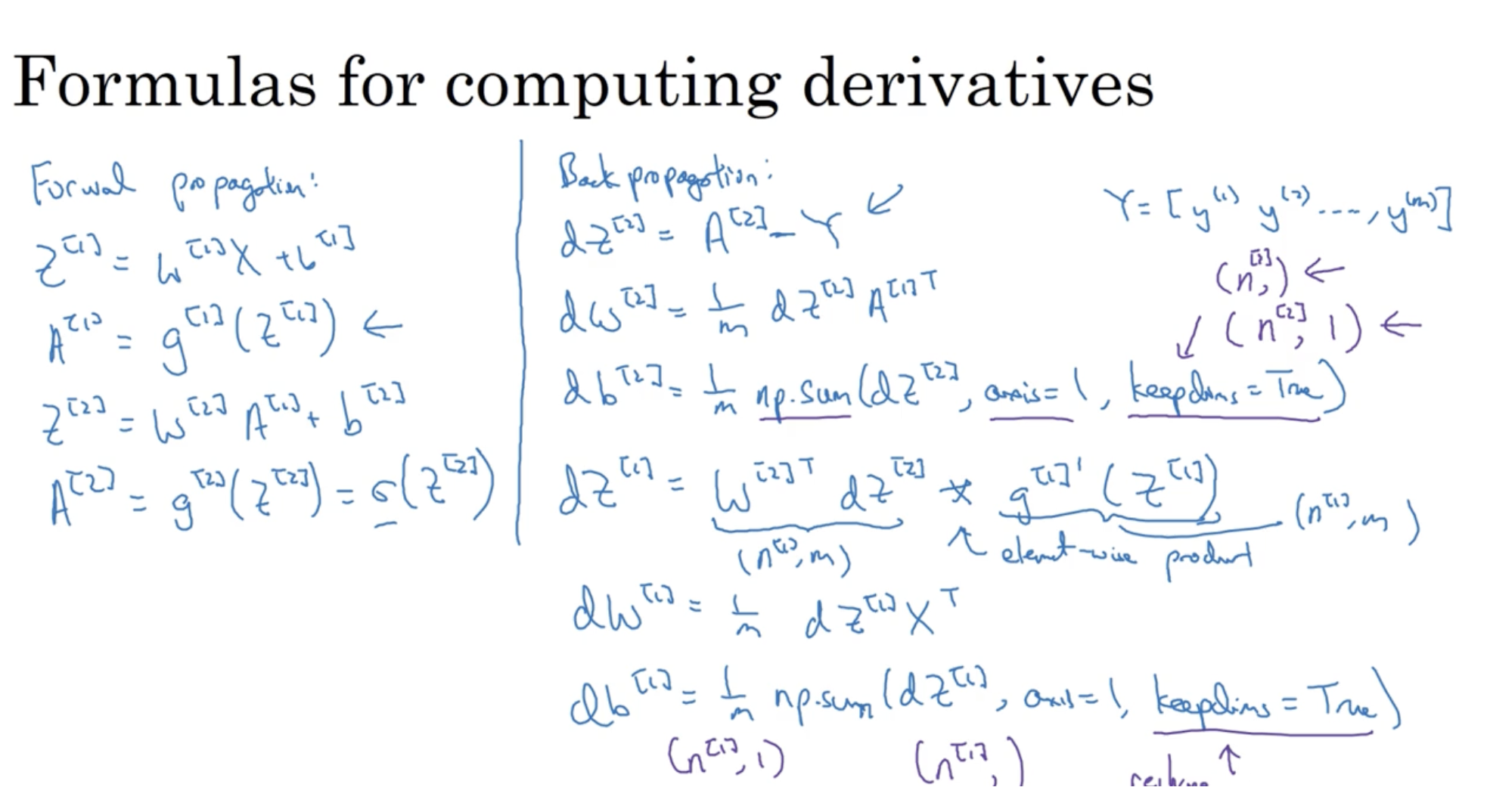
- 먼저 Forward Propagation을 통해 Z[1],A[1],Z[2],A[2]의 값을 구한다.
- 다음으로 Back Propagation을 통해 dz[2],dw[2],db[2],dz[1],dw[1],db[1] 값을 구한다.
- dz[2]=A[2]−Y
- dw[2]=m1dz[2]A[1]T
- db[2]=m1np.sum(dz[2], axis=1, keepdims=True)
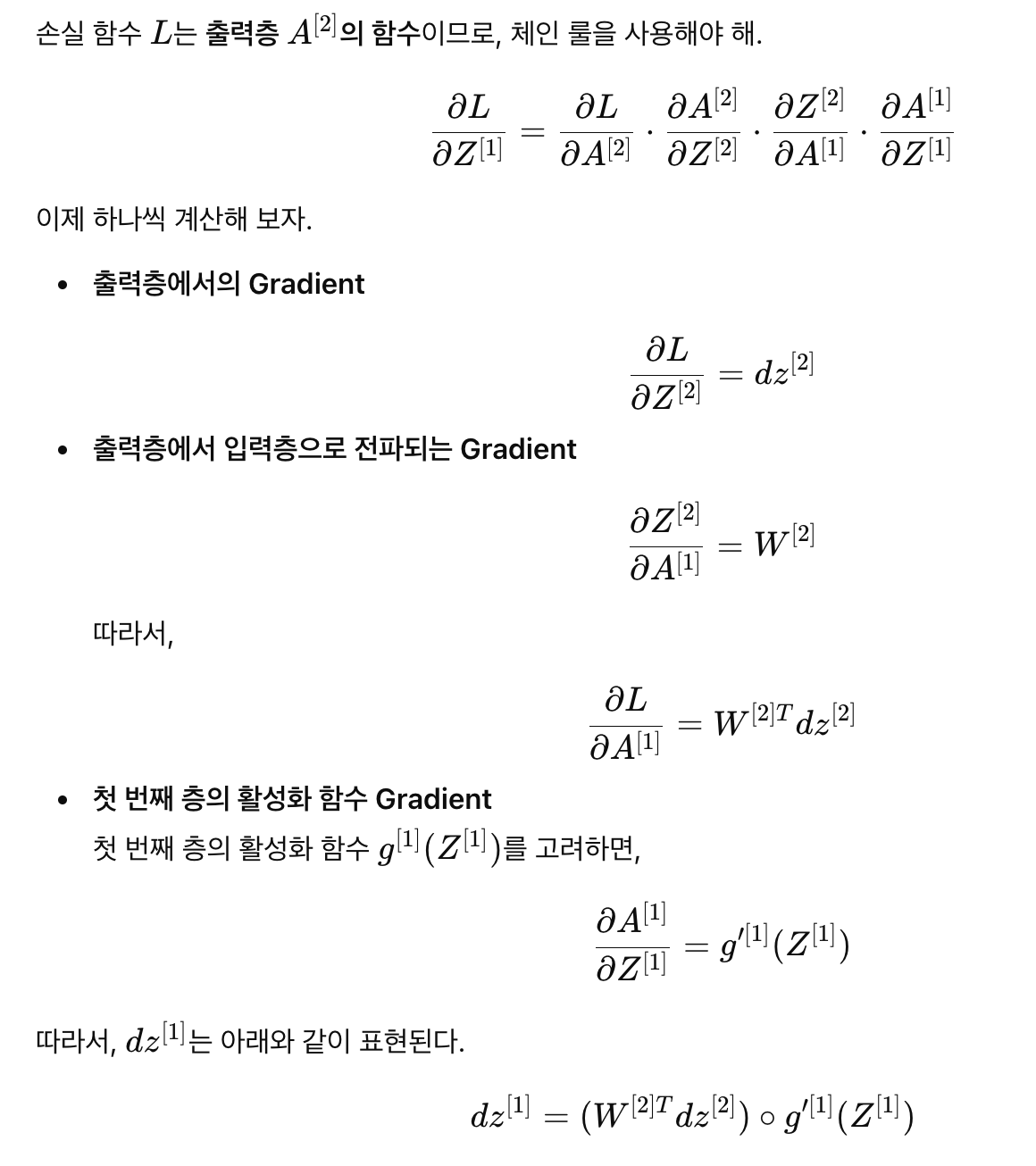
- dz[1]=(W[2]Tdz[2]).∗(g′[1](Z[1])) (이 부분은 이해가 잘 안된다. 왜 이렇게 나오는 걸까.. 아래 chat gpt를 통해 알아냈다. 쉽게 생각해서 dz[1]=∂A[1]∂J×∂Z[1]∂A[1]이다. 그러나 강의에서는 ∂A[1]∂J를 따로 표기하지 않아서 헷갈렸던 것 같다.)
- db[1]=m1np.sum(dz[1], axis=1, keepdims=True)
dz[1]의 유도 과정
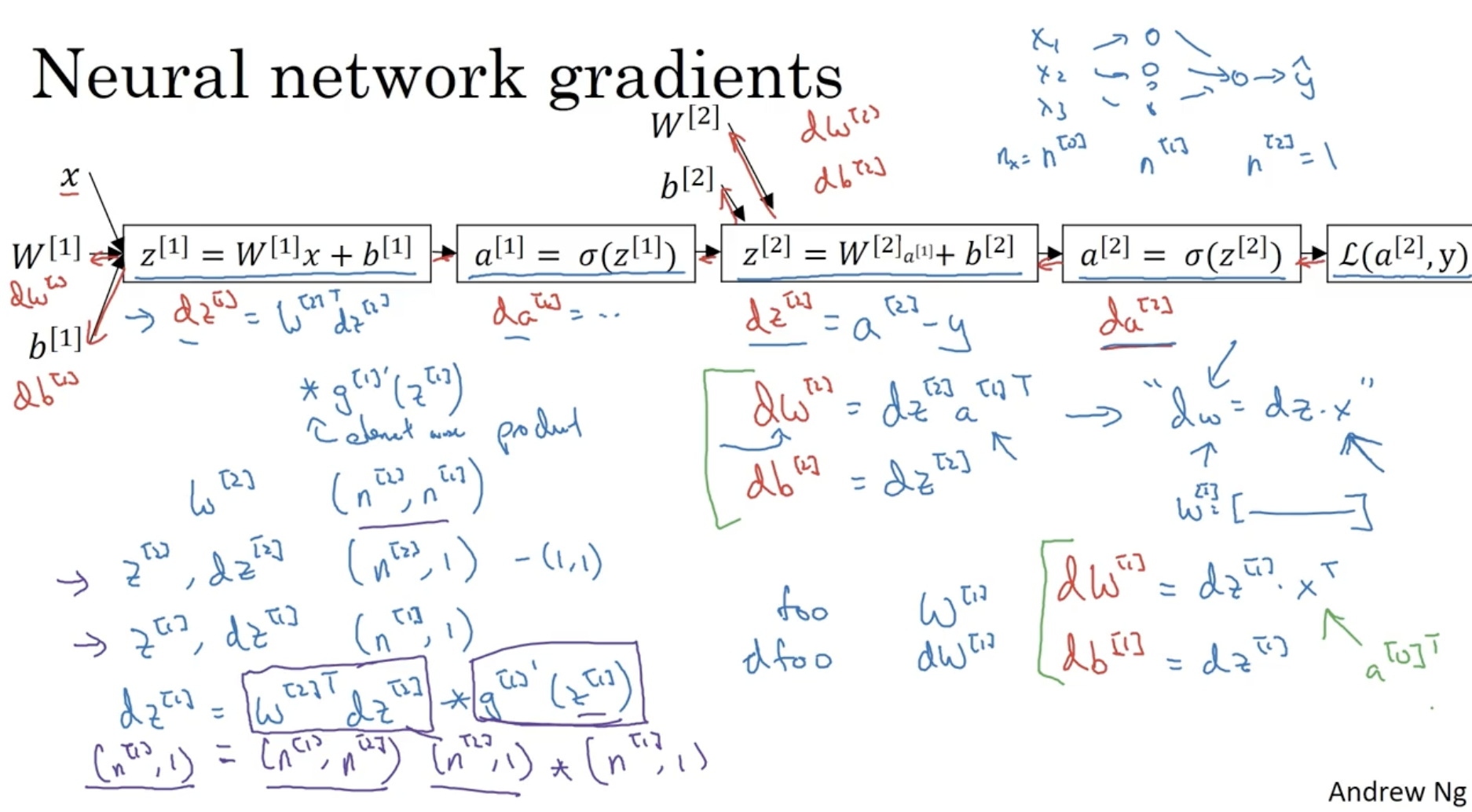
Neural Networks의 미분 과정을 logistic regression과 비교했을 때 유사하다는 것을 확인할 수가 있다.
- dw[2]=dz[2]a[1]T vs. dw=dz⋅x
- z[2]=W[2]a[1]+b[2] 식에서 logistic regression의 x에 해당하는 a[1]을 볼 수가 있다.
- 또한 Neural Networks에서는 foo(W[l],Z[l],...)와 dfoo(dw[l],dz[l],...)의 차원이 같다는 것을 알 수가 있다.
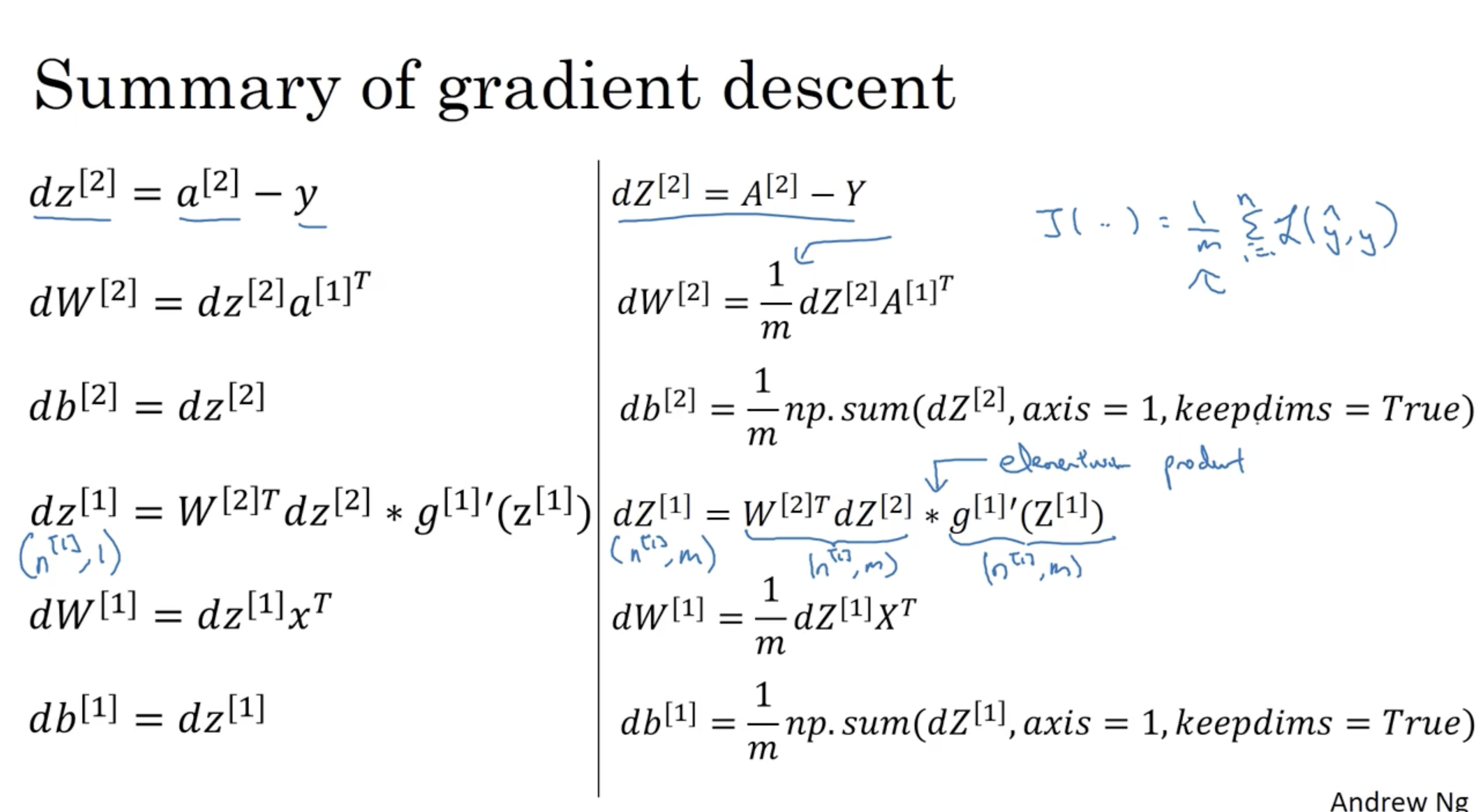
그리고 하나의 데이터에 대해서 적용하는 것 대신, Vectorization을 적용할 수도 있다.
- 좌측은 하나의 데이터에 대한 예시이며, 우측은 vectorization을 적용한 예시이다.
그렇다면 만약 초기 파라미터 W,b를 0으로 초기화한다면 어떻게 될까?
- 먼저 forward propagation을 적용했을 때, 같은 레이어의 유닛들의 값은 모두 동일하게 나올 것이다.
- 그리고 back propagation을 통해 gradient descent alg.을 적용하여 W,b값을 갱신해도 W,b의 원소값들은 모두 동일하게 나오고, 이로 인해 역시 다시 forward propagation을 진행해도 모든 유닛들의 값이 동일하게 나오게 된다.
- 이처럼 유닛들 간의 차이가 없어지게 되므로 이는 Nueral Networks.을 사용하는 의미가 없어진다.
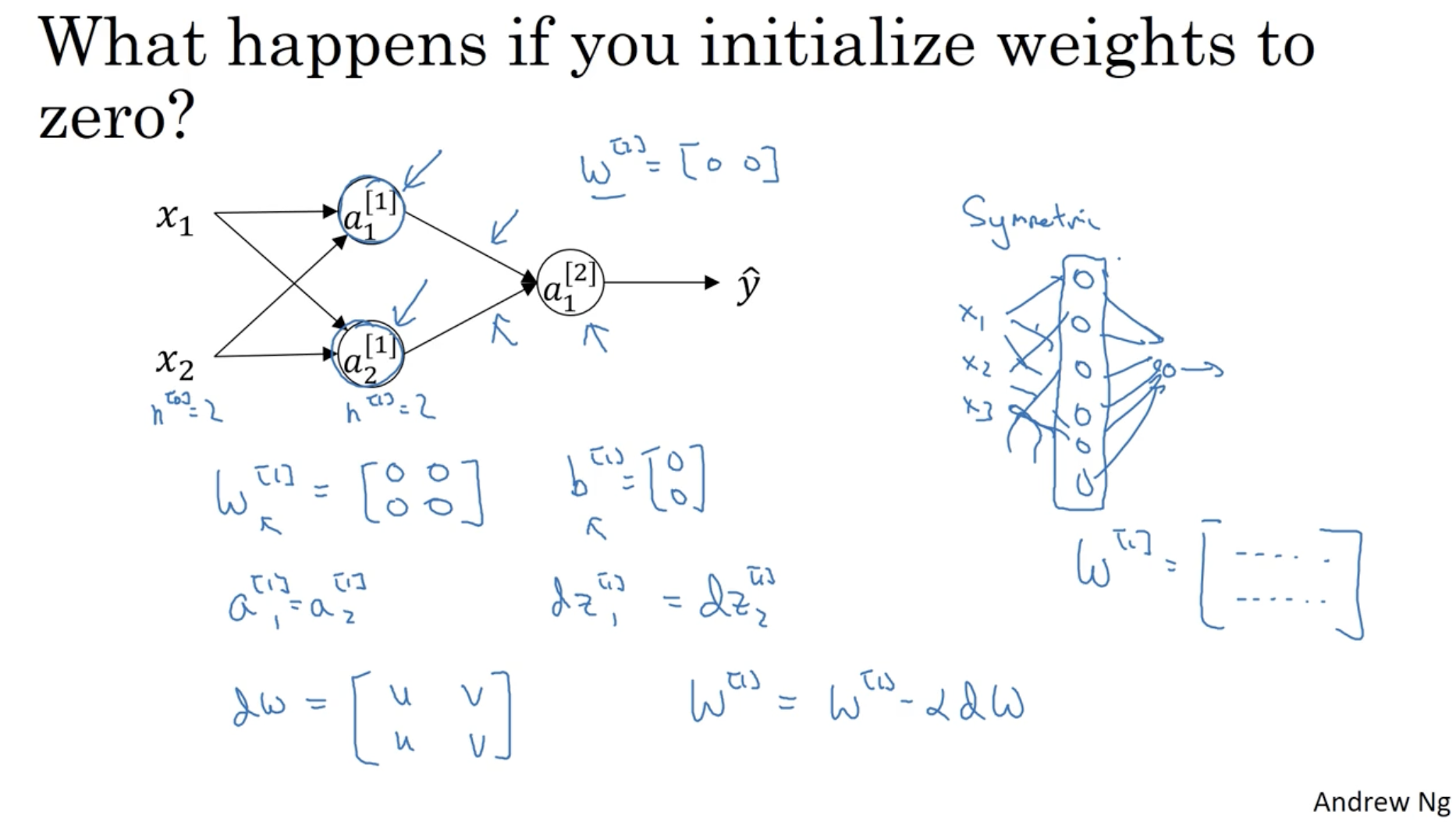
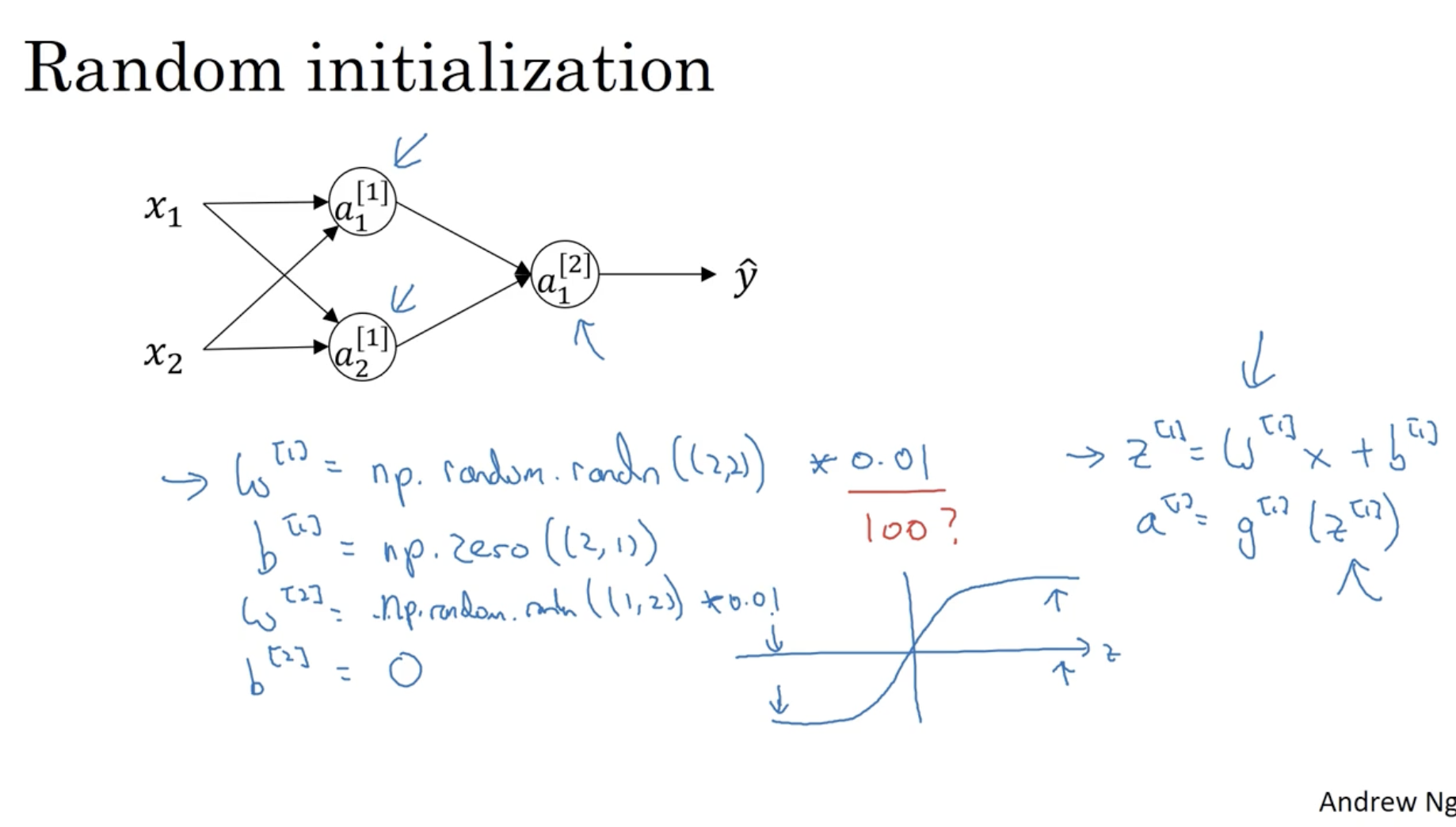
따라서 파라미터의 값을 랜덤하게 초기화하는 것이 좋다.
- W[1]=np.random.randn((2,2))∗0.01
- 여기서 0.01을 곱해주는 이유는 초기 파라미터의 값이 매우 작게 나와야 gradient descent의 속도가 빠르기 때문이다.
- 예를 들어, tanh activation function에 적용하는 tanh(z=WTx+b) z의 값이 매우 크거나 작을 경우, 해당 값의 기울기는 0에 가까울 것이며, 이럴 경우 gradient descent 속도가 매우 느릴 것이다.
- b[1]=np.zeros((2,1))
- 하지만 weight parameter W와 달리 b는 0으로 초기화해도 괜찮다.