YDlidar X4, G2를 사용하였습니다.
최초 작성 2023.02.11
마지막 업데이트 2023.02.17
Tutorial
Clone ydlidar_ros_driver
$ git clone https://github.com/YDLIDAR/ydlidar_ros_driver.git ydlidar_ws/src/ydlidar_ros_driver
Build ydlidar_ros_driver package
$ cd ydlidar_ws
$ catkin_make
Package environment setup
source ./devel/setup.sh
$echo "source ~/ydlidar_ws/devel/setup.bash" >> ~/.bashrc
$source ~/.bashrc
Confirmation
$ echo $ROS_PACKAGE_PATH
Serial port Alias
사용자마다 경로 상이할 수 있음
$chmod +x src/ydlidar_ros_driver/startup/*
$sudo sh src/ydlidar_ros_driver/startup/initenv.shRun ydlidar_ros_driver
command : roslaunch ydlidar_ros_driver [launch file]
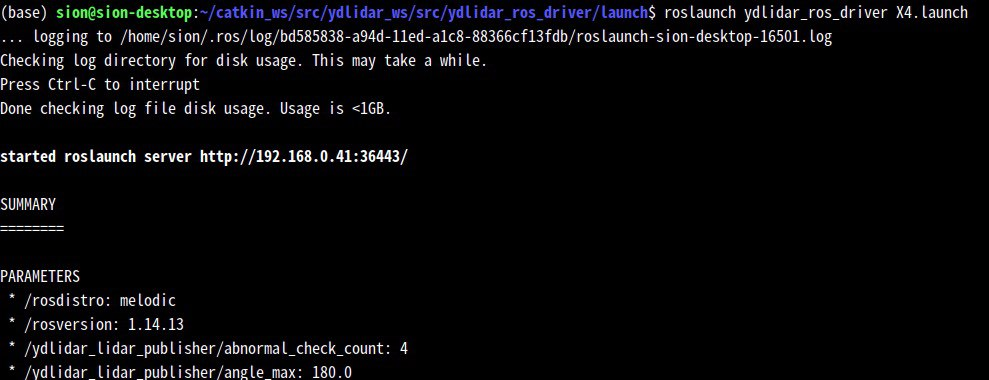
roslaunch ydlidar_ros_driver X4.launch
Result
Visualization
새로운 터미널 열기
$rviz
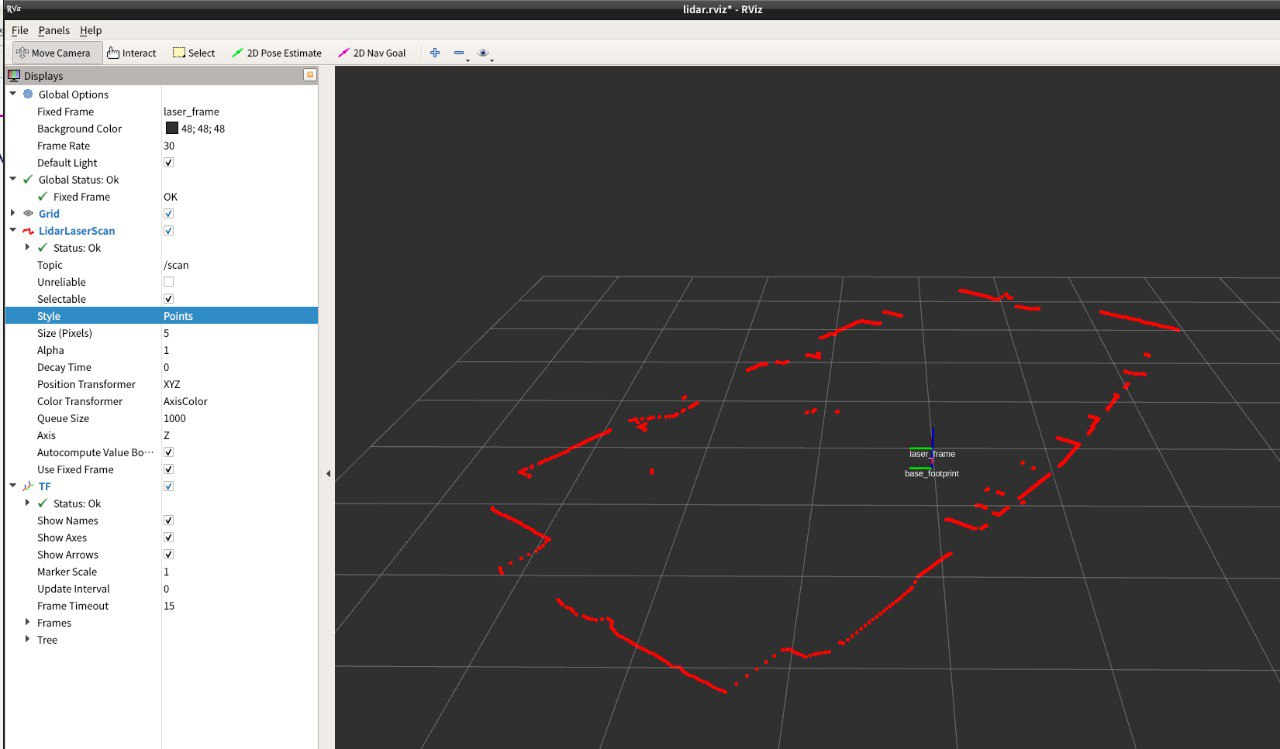
rviz
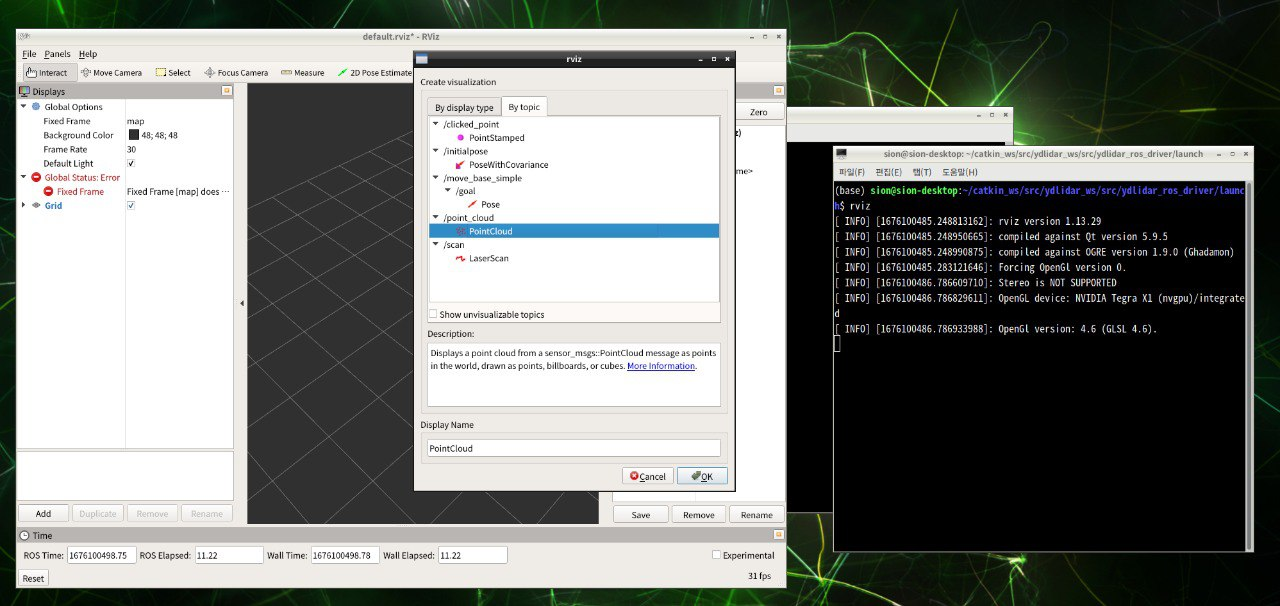
왼쪽 아래 Add버튼 클릭 후 Bytopic 버튼 클릭 후 Point Cloud를 추가해준다.
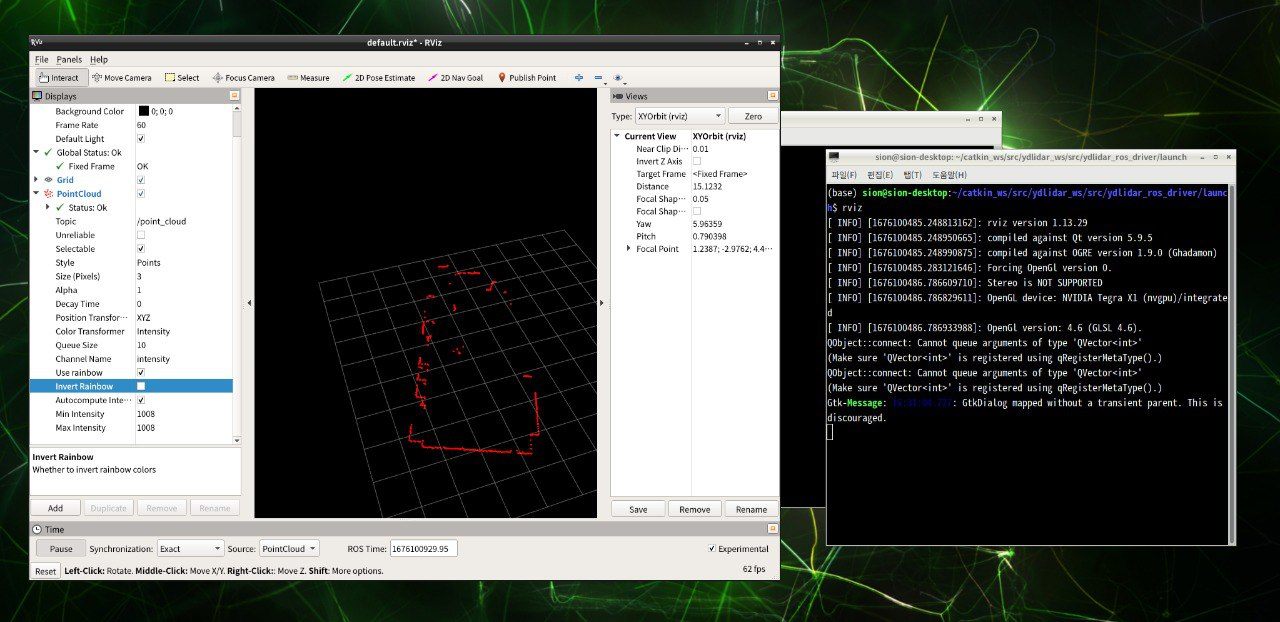
정상적으로 작동하는 것을 확인할 수 있다.
G4결과
roslaunch ydlidar_ros_driver lidar_view.launch
reference

Computer Vision, ROS, ROS2, 3D Lidar, IoT, 티스토리로 블로그 이전함