2023.03.14 수정
저번시간에는 YDLidar를 이용하여 rviz툴로 point cloud를 시각화 해보았다.
이번 시간에는 Hecto-slam을 이용하여 mapping을 해보자.
그전에 Slam, Mapping, Hector이 무엇인지 알아보자.
Setting
ROS melodic
Ubuntu 18.04
Jetson Nano jetpack(4.6.1)
📌SLAM이란
Simultaneous Localization and Mapping 이란 기술의 이름을 줄인말로써, 직역하면 "동시적으로 위치를 추정하고 지도를 작성" 하는 것을 의미한다.
쉽게 SLAM이해하기
RPG 게임을 할 떄 맵 혹은 협곡을 돌아다니면서 지도를 얻는 것이 일종의SLAM이라고 할 수 있다.

SLAM이 주로 사용되는 분야는 자율주행이다.
SLAM알고리즘을 통해 차량은 지도를 작성할 수 있고, 지도 정보를 사용하여
경로를 지정하고 장애물을 피하는 등의 작업을 수행할 수 있다.
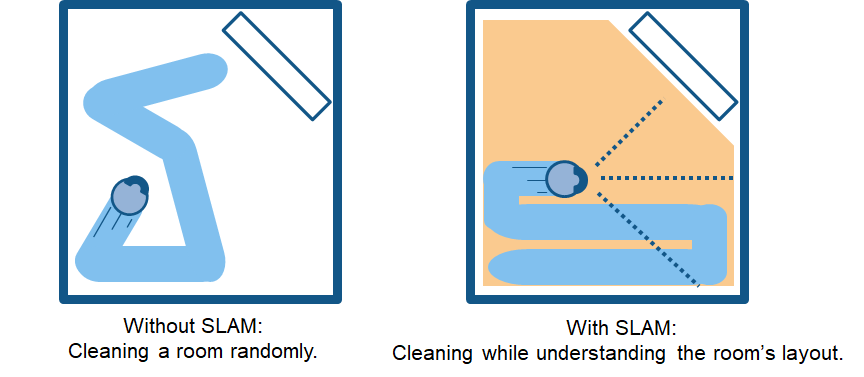
일상생활에서의 SLAM
- 로봇 청소기
- 식당 내 서빙로봇
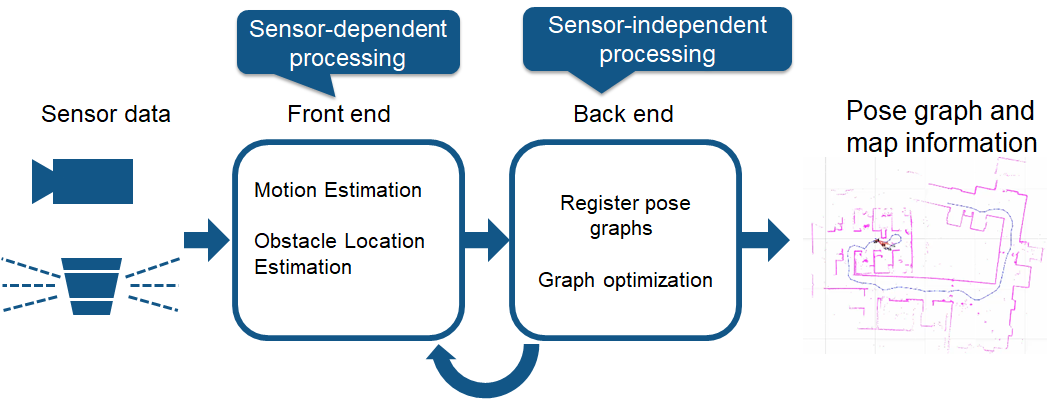
📌SLAM의 작동방식
SLAM의 작동방식은 두가지의 구성요소로 작동한다.
- 프론트엔드 처리 & 센서 신호 처리
- 사용하는 센서의 크게 의존한다.
- 백엔드 처리 & 자세 그래프 최적화
- 센서와는 무관
제목에서 말한 Hector-mapping은 Hector를 사용한 지도작성이란 뜻인데
그렇다면 Hector은 무엇일까?
📌Hector란?
Hector SLAM은 스캔된 점군 자체로 실시간 정합을 수행하는 SLAM이므로, 동일한 특징점을 발견하기 어려운 조건(스캔된 점군의 급격한 회전 및 이동), 특징점의 변화가 없는 구역(일직선 통로 등)에서 오류가 발생한다.
이를 보완하는 SLAM기법은 여러가지가 있다. 예를 들어, gmapping 은 odometry(주행계) 센서 값을 이용해 이를 보정한다.
cf) odometry센서는 다양하나 IMU가 지원되는 센서이면 가능하다(예. MPU6050). SLAM 알고리즘 성능 비교는 다음 링크를 참고한다.
📌Set Package
-
먼저 hector-mapping은 Qt4패키지를 필요로 한다. 따라서 Qt4를 설치해준다.
$ sudo apt-get install qt4-qmake qt4-dev-tools
-
다음 github에서 Hector-mapping를 위한 환경 구축을 위해 소스를 복제하고 빌드한다.
이전 포스팅에서 생성한 ydlidar_ros_driver 폴더에 src 폴더안에 git clone을 하자.
:~/ydlidar_ros_driver/src$ git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
$ cd ..
$ catkin_make
Opencv path 이슈
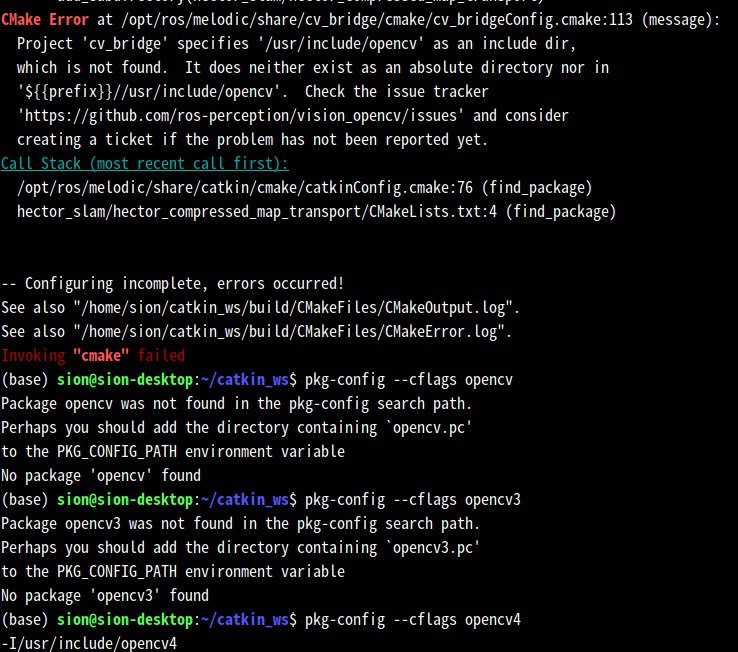
opencv, opencv3, opencv4 중 어떤 것인지, 어디에 있는지 찾아보는 과정이다.
pkg-config —cflags opencv4 명령어로 해결 가능
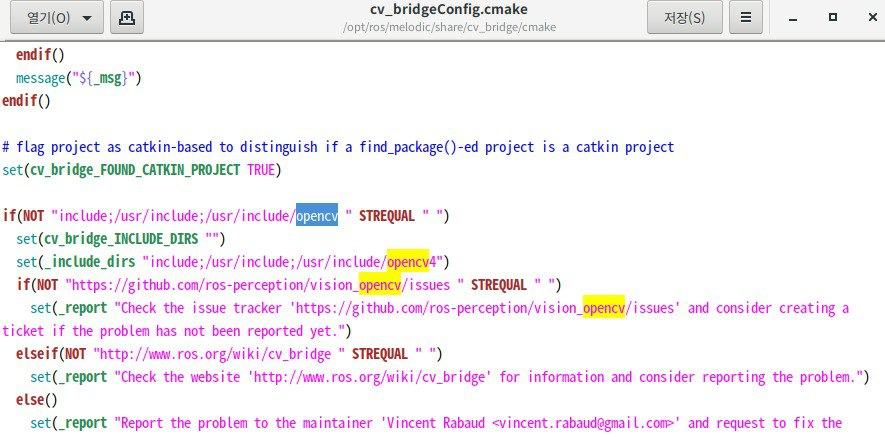
/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake파일에서 opencv를 opencv4로 변경한다.
[solved]
3. Launch 파일 수정
.lanuch파일의 대한 정보는 이곳을 참고하면 좋을 것 같다.
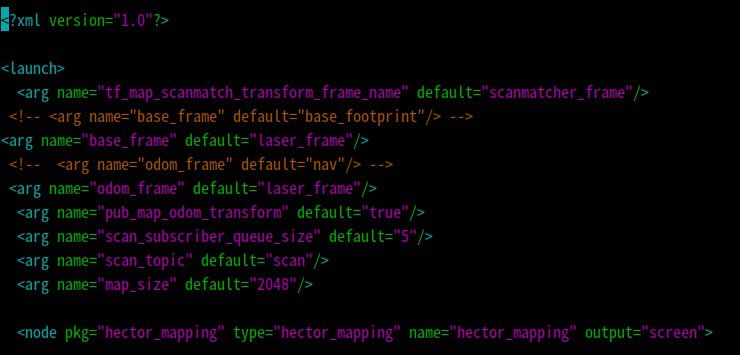
3-1. 1. "mapping_default.launch" 파일을 수정해준다.
파일 위치
$ nano ~/ydlidar_ros_driver/src/hector_slam/hector_mapping/launch/mapping_default.launch
.launch파일은 태그 사용언어인 xml 형식으로 씌여진 파일이다.
roslaunch명령어에서 사용되는
$ nano ~/ydlidar_ros_driver/src/hector_slam/hector_mapping/launch/mapping_default.launch
< launch >두 번째 줄을 주석처리 후 다음과 같이 수정해준다.
3-2. 마지막 부분의 < node > 부분을 다음과 같이 수정해준다.

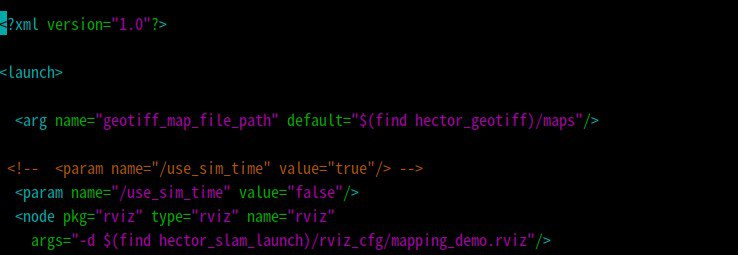
3-3. tutorial.launch 파일 수정
파일위치
$ nano ~/ydlidar_ros_driver/src/hector_slam/hector_slam_launch/launch/tutorial.launch
< launch >의 두번째 줄을 주석처리 후 다음과 같이 수정해준다.
📌구현
터미널 3-4개가 필요하다.
터미널을 열고 다음 명령어를 실행한다.
$ roscoreroscore명령어는 모든 ros 노드들에 대한 정보 중계를 담당한다.
각 노드들이 서로의 존재를 인식하게 하는 역할만 담당하고, 이후는 노드들끼리 직접 통신한다.
모든 통신이 roscore를 거치는 것은 아니다.
$ roslaunch ydlidar_ros_driver lidar_view.launch
$ roslaunch hector_slam_launch tutorial.launch
roslaunch 명령어는 노드를 여러 개 실행 및 실행 옵션을 설정 한다.
roscore명령어를 사용하지 않고서 여러개의 실행파일을 동시 실행할 수 있는 명령어이다.
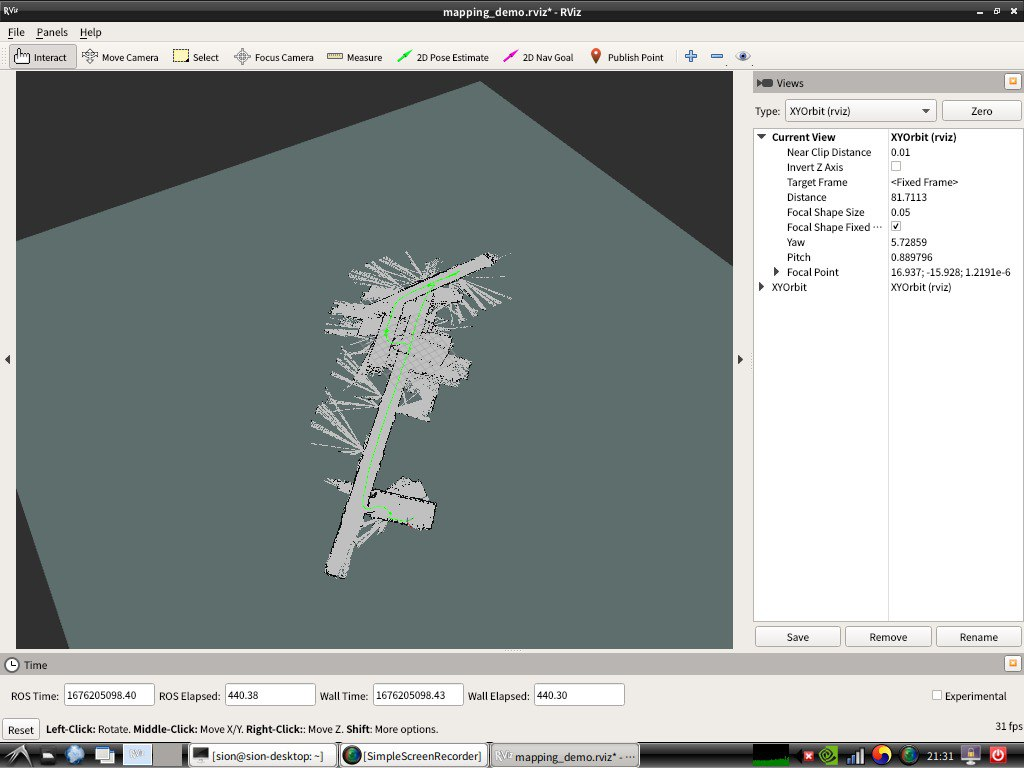
결과
참고
https://kr.mathworks.com/discovery/slam.html
https://blog.naver.com/PostView.naver?blogId=ycpiglet&logNo=222153686510
http://kasimov.korea.ac.kr/dokuwiki/doku.php/activity/public/2021/ros/2
http://daddynkidsmakers.blogspot.com/2019/
https://archit0994.wixsite.com/architshah/post/manage-your-blog-from-your-live-site

'
이전 포스팅에서 생성한 ydlidar_ros_driver 폴더에 src 폴더안에 git clone을 하자.
:~/ydlidar_ros_driver/src$ git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
$ cd ..
$ catkin_make
'
위 과정을 진행할 때, ydlidar_ros_driver 폴더에 src 폴더안에 git clone 까지는 잘 됩니다.
그 다음 $ cd .. $ catkin_make 를 진행할 때,
The specified base path "/home/dogbug3/rostest/ydlidar_ws/src/ydlidar_ros_driver" contains a package but "catkin_make" must be invoked in the root of workspace 라고 빨간색 에러가 뜹니다.
이 원인 때문인지 모르겠지만 마지막 단계에서
1번 터미널에서 roscore명령어 입력후
2번 터미널에서 lidar_view.launch를 실행하고
3번 터미널에서 tutorial.launch를 실행하면
2번 터미널에서 Shutdown request received.
Reason given for shutdown : [[/rviz] Reason: new node registered with same name 이라고 오류가 뜨며 lidar_view.launch가 종료됩니다.
혹시 해결방법 아실까요..?ㅜㅜ