Reference: Prof Steve Brunton, Control Bootcamp
Youtube Link
다음과 같은 선형 시스템을 가정하자.
[T,D]=eig(A)
T=[ξ1,ξ2,…,ξn]
D=⎣⎢⎢⎢⎢⎡λ10⋮00λ2⋮0⋯⋯⋱⋯00⋮λn⎦⎥⎥⎥⎥⎤
Stability (안정성)
안정성이란 시간이 무한대로 흐를 때 시스템이 수렴하는지 발산하는지를 판별하는 지표이다. 이전 포스트에서 시스템의 해가 고유값으로 다음과 같이 표현됨을 증명했다:
x(t)=TeDtT−1x(0)
시스템의 안정성을 분석하기 위해 임의의 고유값 λ=a+ib에 대해 Euler's formula를 적용해보자:
eλt=e(a+ib)t=eat[cos(bt)+isin(bt)]
이제 실수부 a의 값에 따라 세 가지 경우로 나누어 분석할 수 있다:
Case 1: a>0 (실수부가 양수)
eat→∞ast→∞
∣cos(bt)∣,∣sin(bt)∣≤1
∴∣eλt∣=eat→∞
⇒Unstable (불안정)
Case 2: a<0 (실수부가 음수)
eat→0ast→∞
∣cos(bt)∣,∣sin(bt)∣≤1
∴∣eλt∣=eat→0
⇒Stable (안정)
Case 3: a=0 (실수부가 0)
eλt=cos(bt)+isin(bt)
∴∣eλt∣=1
⇒Marginally Stable (임계안정)
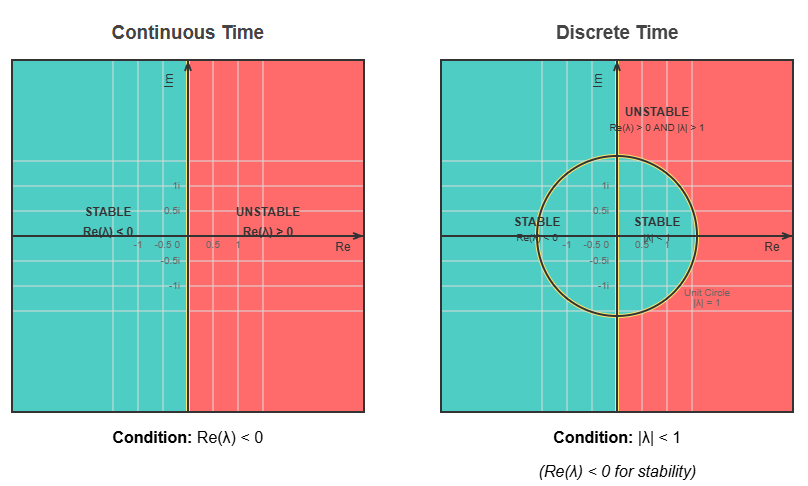
결론: 연속시간 시스템이 안정하려면 모든 고유값의 실수부가 음수여야 한다.
Discrete Time (이산시간)
이산시간에서의 선형 시스템을 다음과 같이 가정하자:
xk+1=A~xk,xk=x(kΔt)
여기서 A~는 연속시간 행렬 A와 다음 관계를 갖는다:
A~=eAΔt
각 시간 스텝에서의 상태는 다음과 같이 표현된다:
x1=A~x0,x2=A~2x0,…,xk=A~kx0
A~의 고유값을 λ라 하면, k 스텝 후의 응답은 λk에 비례한다. 고유값을 극좌표로 표현하면:
λ=Reiθ
λk=Rkeikθ
시간이 지날수록 시스템이 수렴하려면:
∣λk∣=Rk→0ask→∞
이는 R<1, 즉 ∣λ∣<1일 때 성립한다.
결론: 이산시간 시스템이 안정하려면 모든 고유값의 크기가 1보다 작아야 한다.
Summary
- 연속시간: 모든 고유값이 좌반평면에 위치 (Re(λ) < 0)
- 이산시간: 모든 고유값이 단위원 내부에 위치 (|λ| < 1)
- 두 조건은 λdiscrete=eλcontinuousΔt 관계로 연결됨