1. Triangulation
두개의 이미지에서 매칭된 feature들을 바탕으로 3D point를 복원하는 것.

이론적으로는 각 이미지의 레이들의 교점이 3D point의 좌표가 되는게 맞지만 feature 사이의 노이즈들로 인해 오차가 존재한다. 따라서 각 레이들을 조금씩 이동시켜 만날 수 있는 점들(F, G)를 구한 후 그 중점인 H를 구한다.
이 방법을 사용하기 위해 F와 G의 위치를 벡터를 이용해 알아낸다.
시작점은 P, Q, 거리를 나타내는 변수는 λ, u, 방향성을 나타내는 변수는 r, s 이다.
방향성은 켈리브레이션된 이미지 좌표에 2D ->3D rotation(3D->2D rotation의 역행렬이자 트랜스포즈행렬)을 곱해서 얻는다. 여기서 λ, u가 우리가 알고싶은 미지수가 된다.
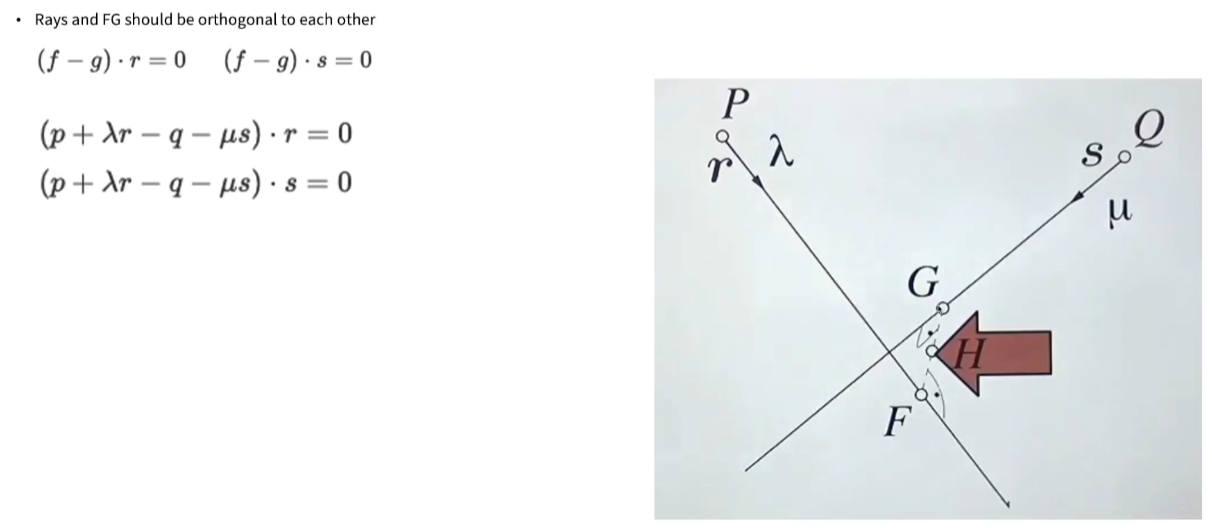
F와 G가 가장 가까우려면 (f-g) 벡터가 r, s 벡터와 수직이어야 한다.
이를 수식으로 정리하면 아래와 같다.
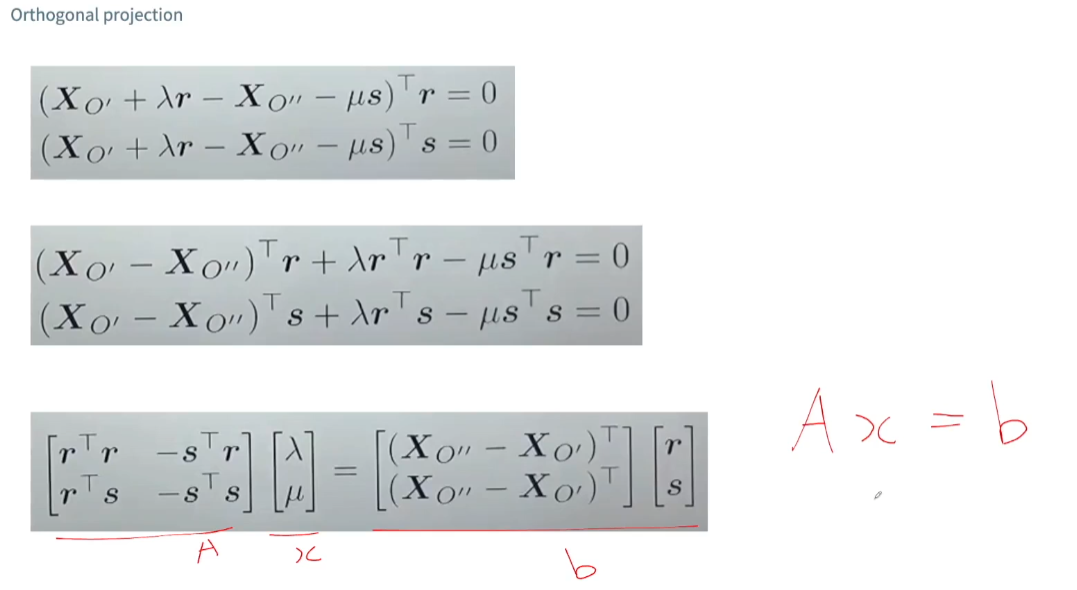
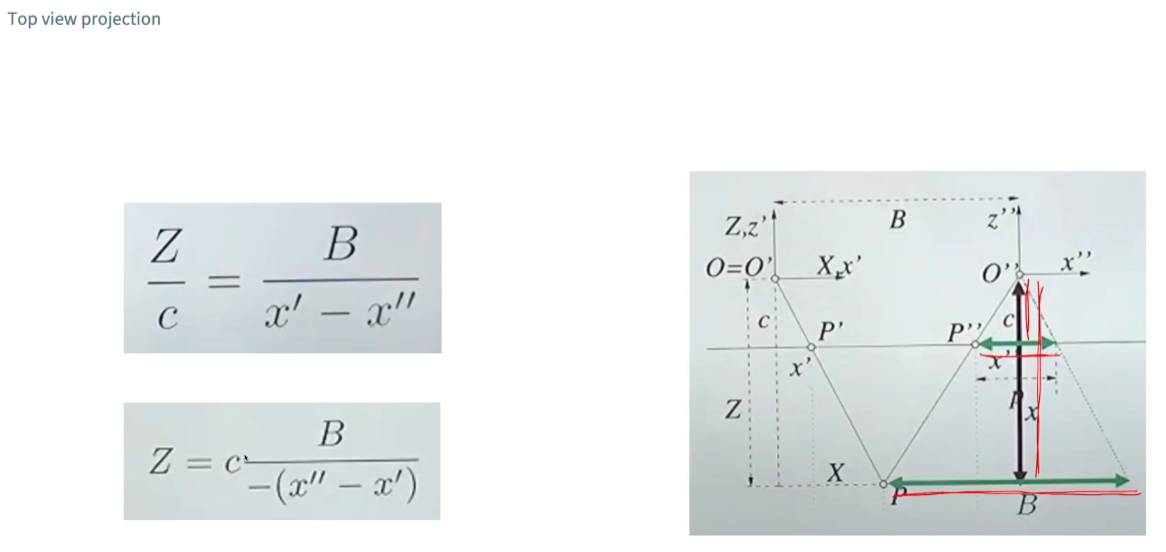
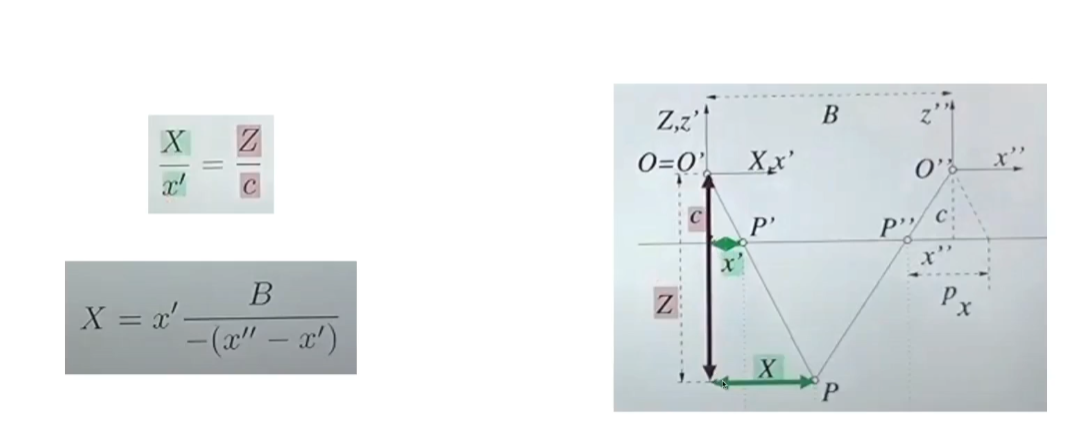
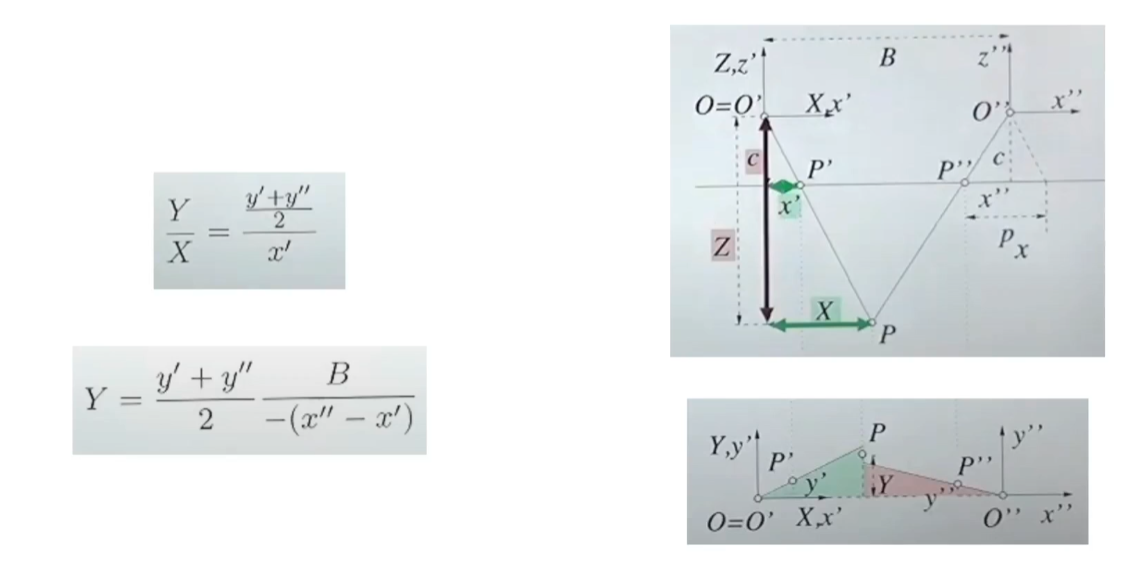
Xo' 가 카메라1의 중점 Xo"가 카메라2의 중점이다.
2. Stereo Triangulation