3D Rigid Body Motion
3D Rigid Body Motion: 3차원 좌표계의 변환을 의미
Pose = 카메라의 위치(Position) + 카메라가 바라보는 방향(Orientation)
- Position = {tx, ty, tz}
- Orientation = {Rx, Ry, Rz}
- 6 Degrees of Freedom = {tx, ty, tz, Rx, Ry, Rz}
다양한 Rotation 표현법
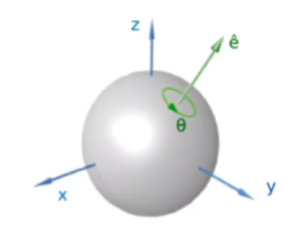
1. Axis-angle
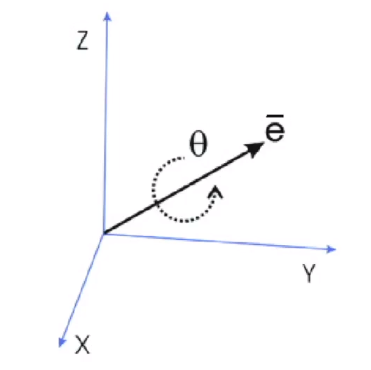
- Axis-angle = Angle-axis = Rotation vector = Rodrigues angle 다 같은말.
- 축의 방향을 가리키는 벡터와 회전각으로 구성.
- 파라미터 갯수가 적어 메모리 효율성이 좋음.
- Rodirgues formula( Axis-angle <-> Rotation matrix)

2. Quaternion
- 미분가능하며 singularity가 없어 김벌락 걱정이 없다.
- 4DOF representation{w,x,y,z}
3. SO(3) Rotation matrix
- 3축에대한 정보를 하나의 행렬에 모두 담음.
- 미분은 가능하나 파라미터가 많아(9개) 최적화가 불편하다.(Lie Algebra로 풀면 최적화 가능.)

Transformation 표현
- 이동치 표현.
- vector{x,y,z}로 표현.
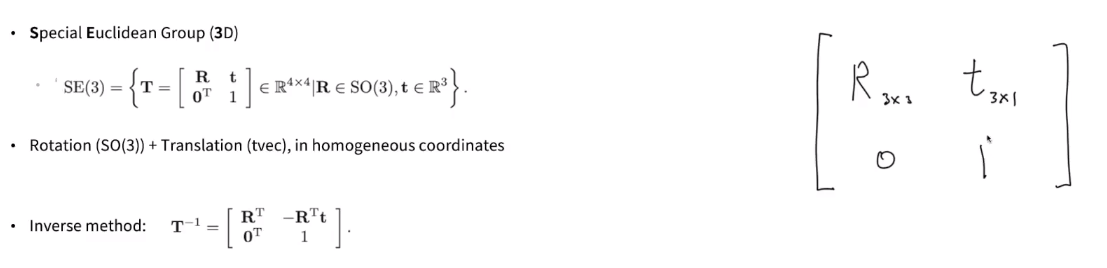
SE(3)
- SO(3) + Transformation
- Spetial Euclidean Group(3D)