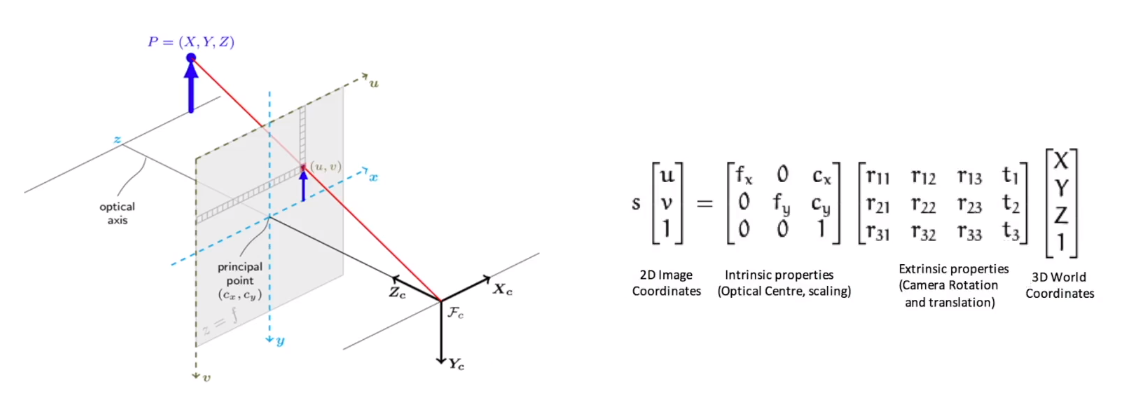
Camera projection

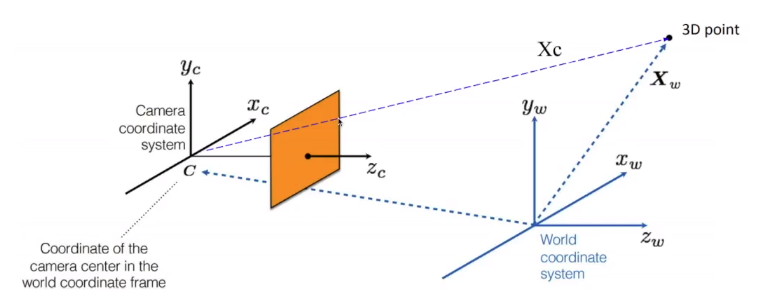
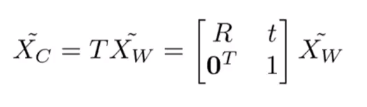
1. World -> Camera
- 월드좌표계도 3D 이며 카메라 좌표계도 3D이므로 3D->3D인 Rigid body motion으로 표현 가능.
- Rigid body motion
- Rotation - 3x3 Matrix(SO(3))
- Translation - 3x1 Vector
- Transformation - 4x4 Matrix(SE(3))
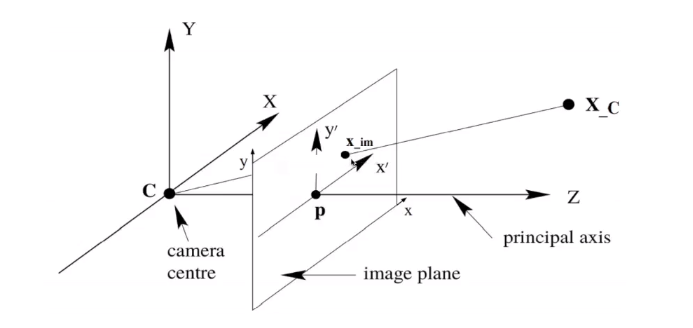
2. Camera -> Image
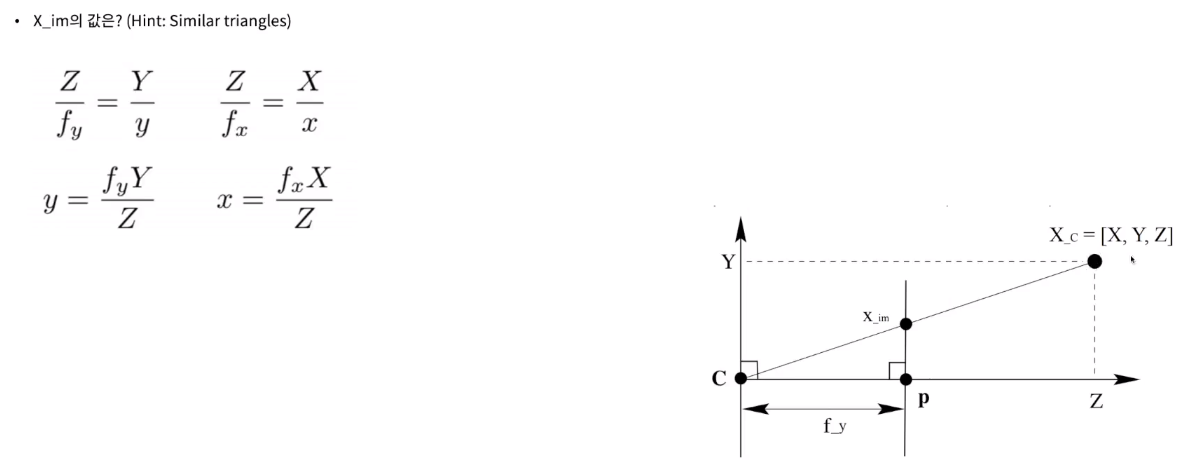
월드죄표계의 있는 X를 카메라 좌표계 기준 X_C로 변환 후 삼각형의 닮음을 이용하여 X_im을 구한다. 하지만 X_im는 픽셀기준이 아닌 상태이다. 보통의 이미지는 좌측상단부터 픽셀이 시작되므로 주점의 위치만큼 옮겨주어야 한다. (+cx, +cy)

이를 Homogeneous coordination으로 표기하여 행렬을 분해하면 Intrinsic matrix를 얻을 수 있다.
Overall