1. Least squares
- SLAM은 동시적 위치추정과 맵핑이다. 최적의 맵핑과 위치추정을 위해 최적화를 진행한다.
- Least squares는 SLAM에서 사용하는 최적화 방법이다.
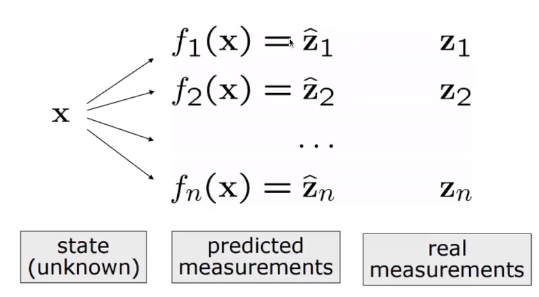
- 우리가 추정한 값을 z^, 실제 값을 z라고 하자.
- Leas squares error는 (z-z^)로 계산한다.
2. Maximum-a-posteriori(MAP) estimation in SLAM
3. Graph-based SLAM
Incremental SLAM(online SLAM)
Batch SLAM
Factograph
Graph-based SLAM
Visual odometry vs Visual-SLAM
