2024.1.30 (화)
QT Creator (Linux)
Dial
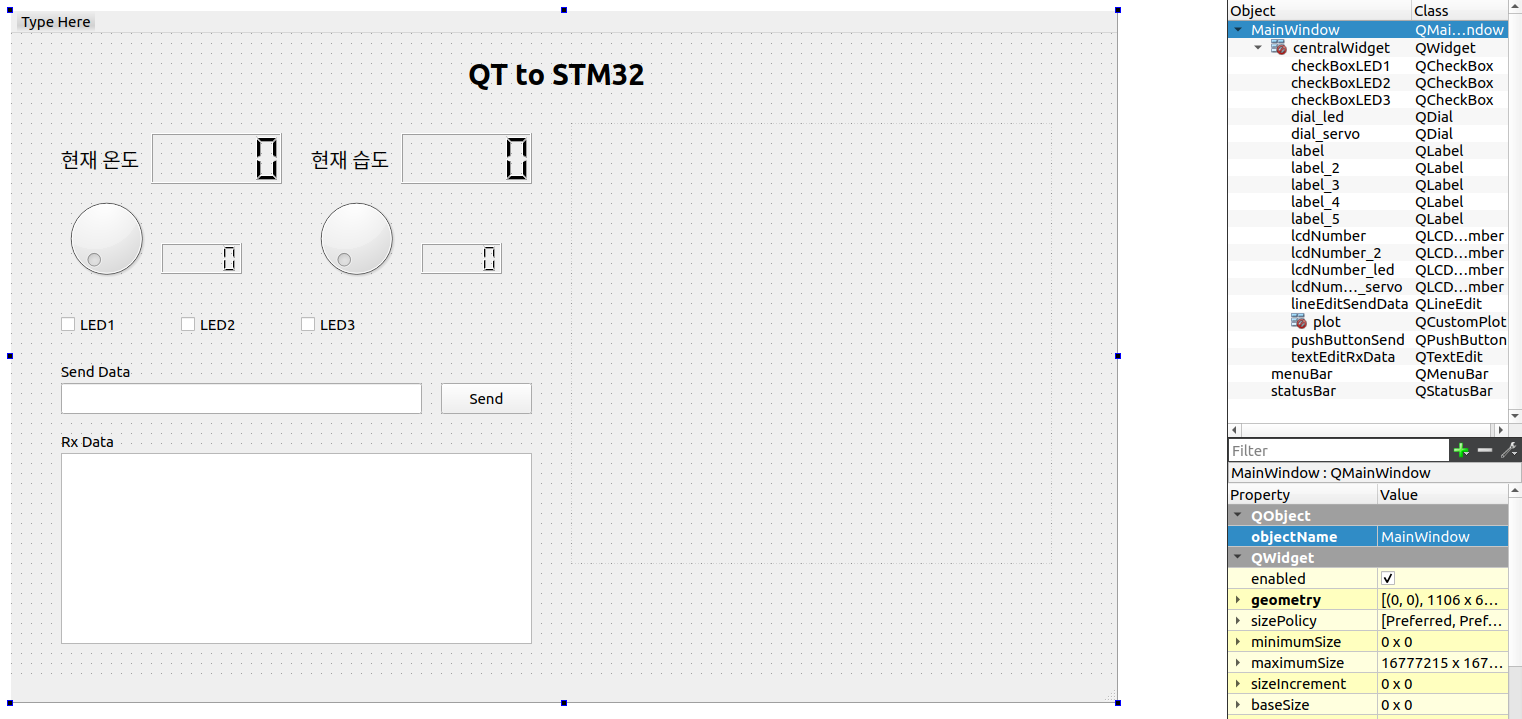
UI
Dial 2개와 LCD 2개를 추가한다
 dial 마우스 우클릭 > Go to slot > valueChanged(int) 메서드를 추가한다
dial 마우스 우클릭 > Go to slot > valueChanged(int) 메서드를 추가한다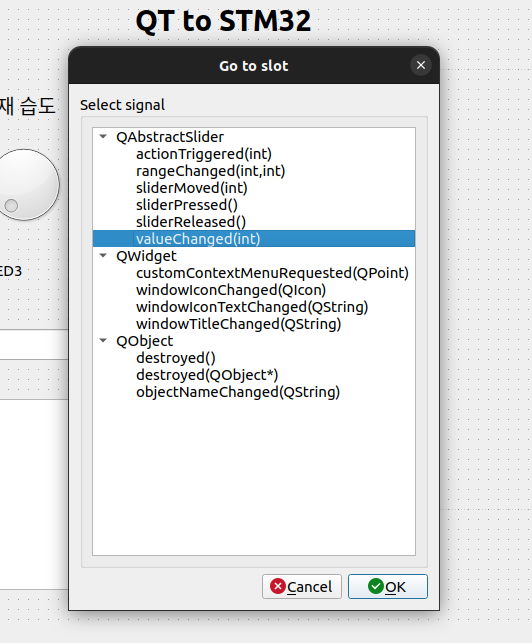 Led도 똑같이 마우스 우클릭 > Go to slot > valueChanged(int) 메서드를 추가한다
Led도 똑같이 마우스 우클릭 > Go to slot > valueChanged(int) 메서드를 추가한다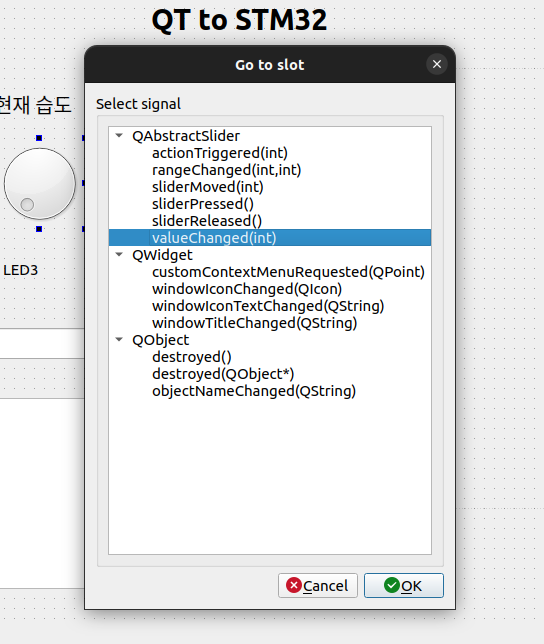
Code
- mainwindow.cpp
// SERVO: 999
void MainWindow::on_dial_servo_valueChanged(int value)
{
QByteArray servo_data = "SERVO:";
servo_data.append(QString::number(ui->dial_servo->value()));
ui->lcdNumber_servo->display(ui->dial_servo->value());
socket->writeDatagram(servo_data, QHostAddress("10.10.15.91"), 9999);
qDebug() << "servo data: " << servo_data << endl;
}
void MainWindow::on_dial_led_valueChanged(int value)
{
QByteArray led_data = "LED:";
led_data.append(QString::number(ui->dial_led->value()));
ui->lcdNumber_led->display(ui->dial_led->value());
socket->writeDatagram(led_data, QHostAddress("10.10.15.91"), 9999);
qDebug() << "led data: " << led_data << endl;
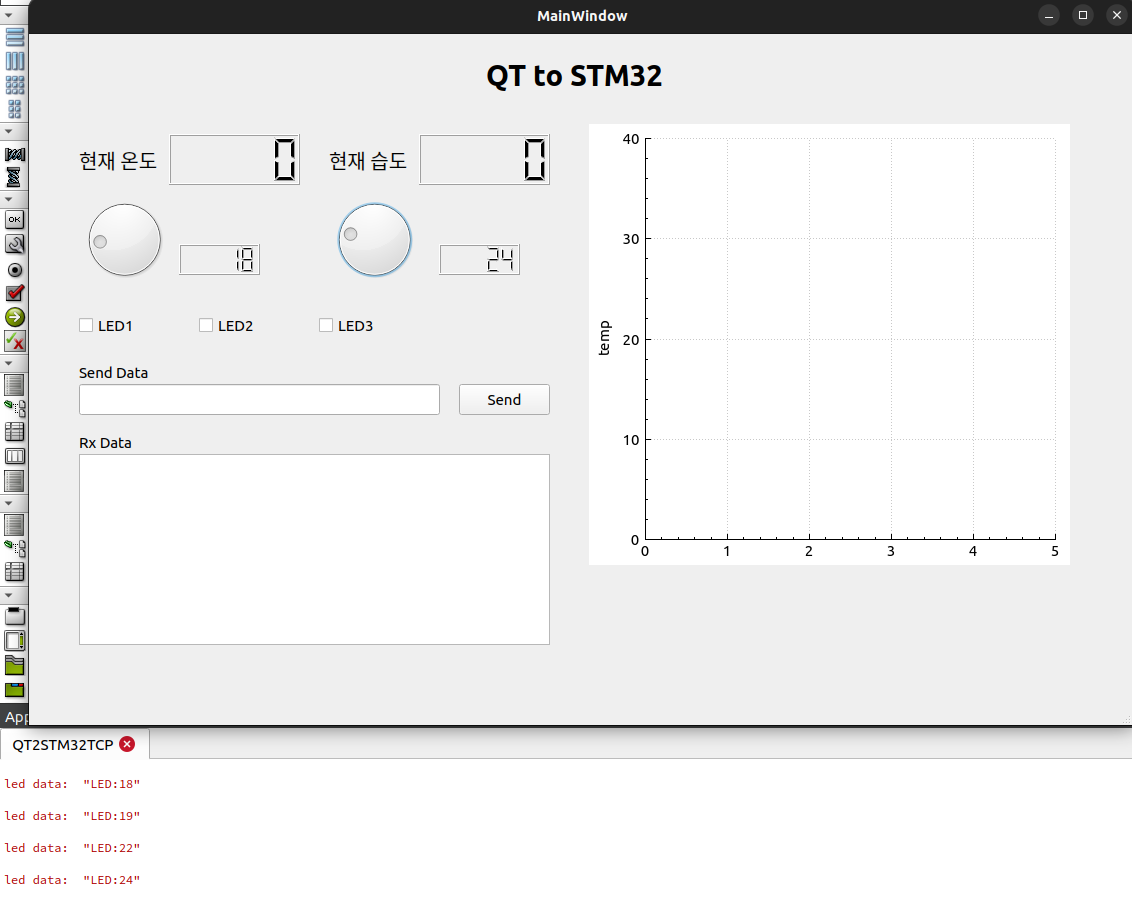
}Output
Slider
UI
Slider와 Clear 버튼 추가
Dial 눈금은 속성 맨 밑에 notchesVisible 체크 표시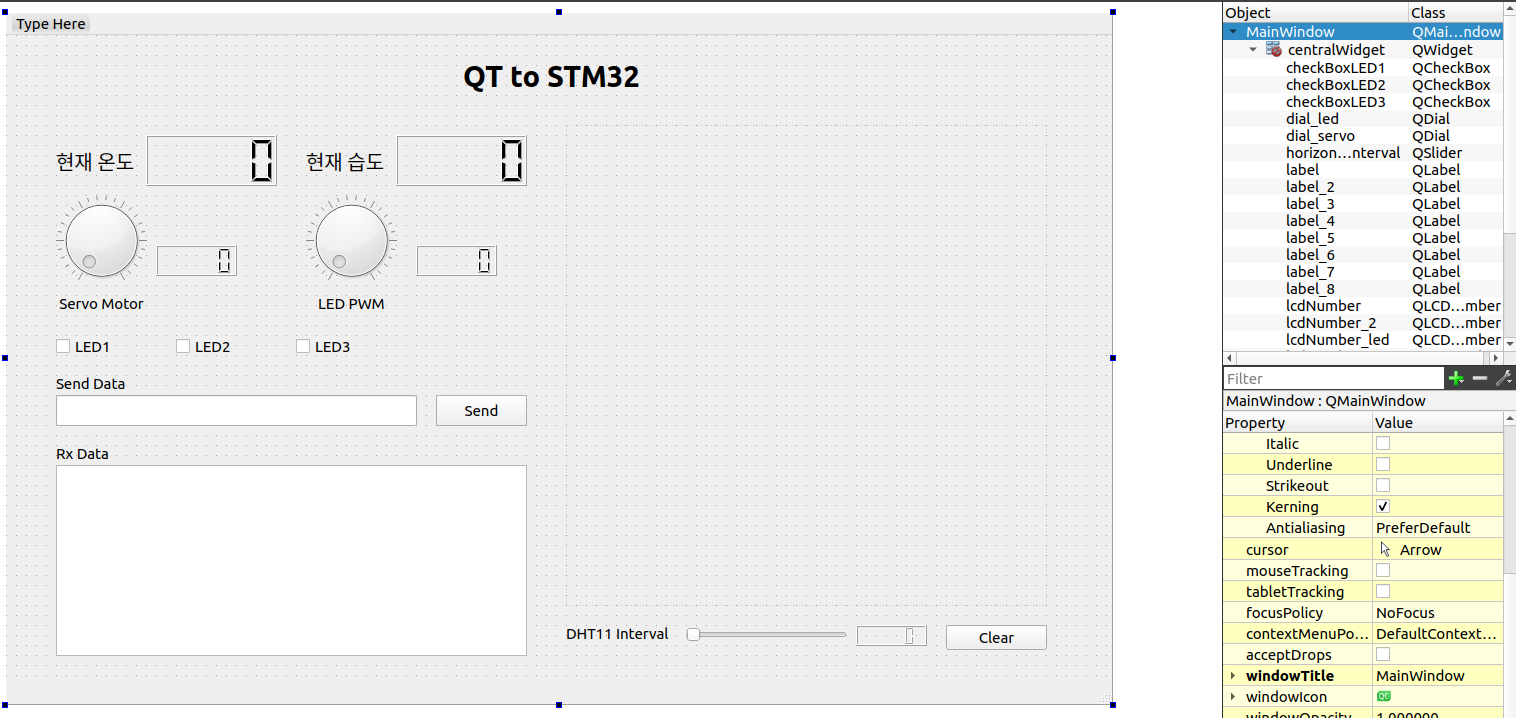 Slider 마우스 우클릭 > Go to slot > valueChanged(int) 메서드를 추가한다
Slider 마우스 우클릭 > Go to slot > valueChanged(int) 메서드를 추가한다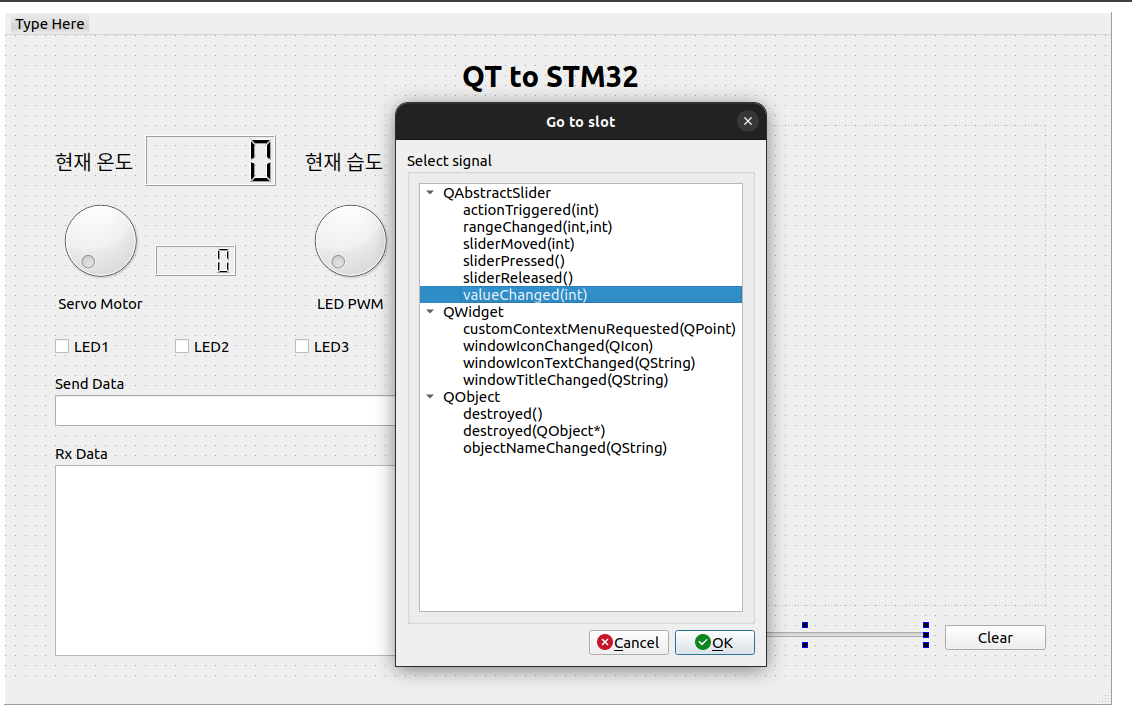
Code
void MainWindow::on_horizontalSlider_DHT11_Interval_valueChanged(int value)
{
QByteArray interval_data = "DHT11:";
interval_data.append(QString::number(ui->horizontalSlider_DHT11_Interval->value()));
ui->lcdNumber_slider->display(ui->horizontalSlider_DHT11_Interval->value());
socket->writeDatagram(interval_data, QHostAddress("10.10.15.91"), 9999);
qDebug() << "DHT11 data: " << interval_data << endl;
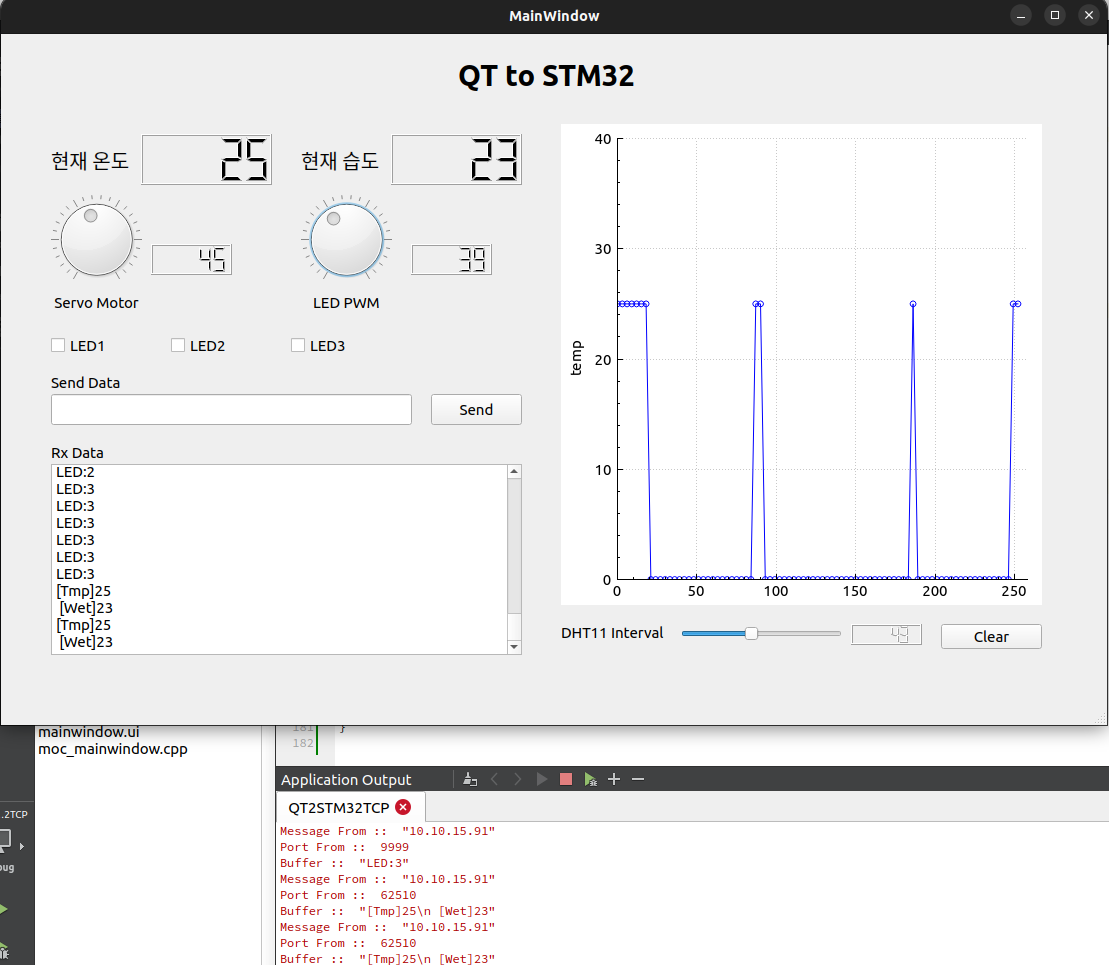
}Output
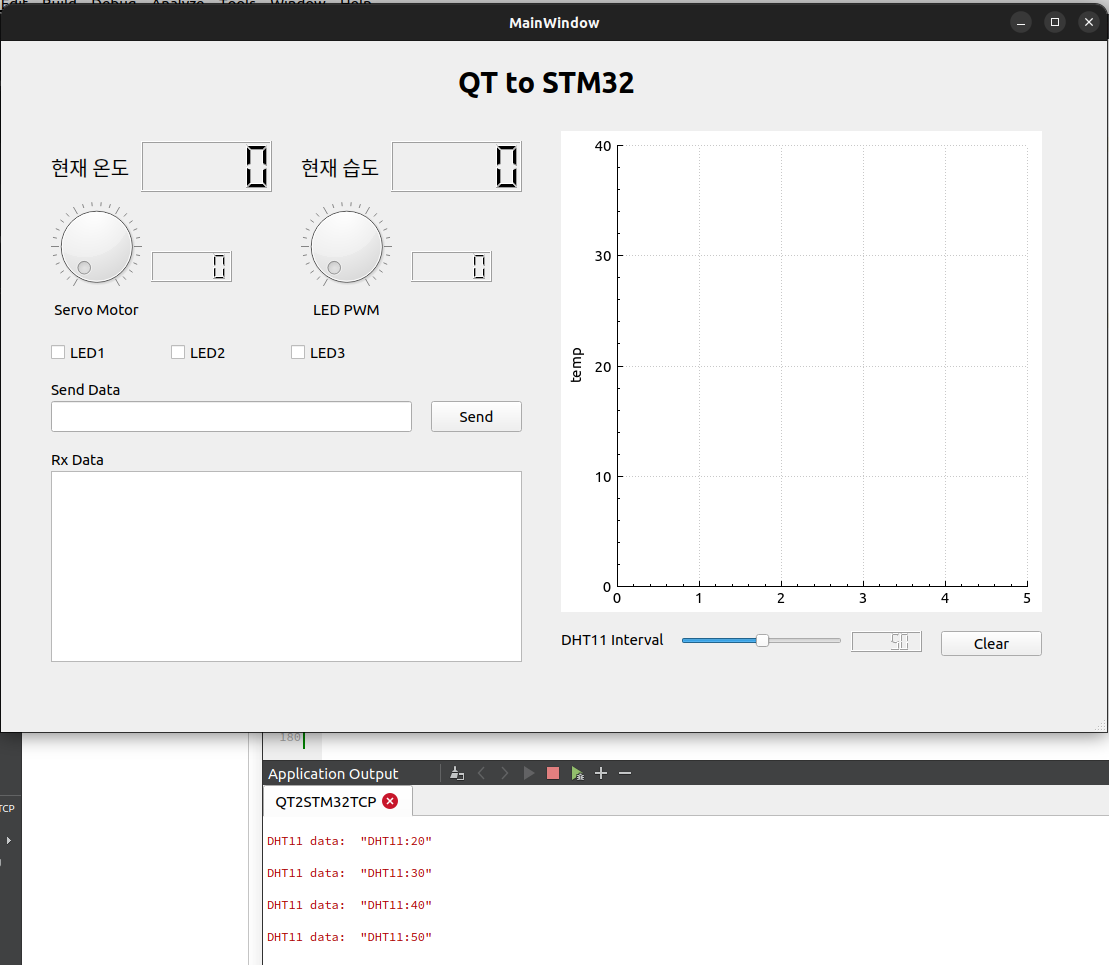
Dial, Slider, Clear 버튼 최종 결과
Output
Code
- mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include "qcustomplot.h" // ADD_JM
#include <QDebug> // ADD_JM stdio.h와 비슷
#include <QString> // ADD_JM c++의 string을 진화시킨 것
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
// ------------ TCP Start
// 1. socket을 생성
socket = new QUdpSocket(this);
// 2. IP, SW, PORT 번호 등록
bool result = socket->bind(QHostAddress::AnyIPv4, 9999);
qDebug() << result; // qDebug --> c++의 cout
if (result) {
qDebug() << "PASS";
}
else {
qDebug() << "FAIL";
}
// SIGNAL : event 발생
// SLOT : INT service routine (함수)
// connect : mapping (연결시켜 주는 것)
// socket으로부터 읽을 data가 존재하면 나의(this) readyRead()를 호출하여라
connect(socket, SIGNAL(readyRead()), this, SLOT(readyRead()));
ui->plot->setInteraction(QCP::iRangeDrag, true);
ui->plot->setInteraction(QCP::iRangeZoom, true);
ui->plot->addGraph();
//ui->plot->xAxis->setLabel("time(s)");
ui->plot->yAxis->setLabel("temp");
ui->plot->yAxis->setRange(0.0, 40.0);
ui->plot->graph(0)->setScatterStyle(QCPScatterStyle::ssCircle); //점찍는 스타일 결정.
ui->plot->graph(0)->setLineStyle(QCPGraph::lsLine); //라인 스타일 결정.
connect(ui->plot, SIGNAL(mouseDoubleClickEvent(QMouseEvent*)), SLOT(QMouseEvent*));
// ------------ TCP End
}
int time_ = 0;
void MainWindow::readyRead()
{
QByteArray Buffer;
double temp_digit; // 온도값
double hydr_digit; // 습도값
QHostAddress sender; // 송신자의 IP
quint16 senderPort; // 송신자의 SW PORT
Buffer.resize(socket->pendingDatagramSize());
// 3. socket으로부터 data를 read
socket->readDatagram(Buffer.data(), Buffer.size(), &sender, &senderPort);
Buffer.chop(1); // [Tmp] 25\n가 왔을 때 \n을 제거 (마지막 byte를 제거)
ui->textEditRxData->append(Buffer); // 창의 맨 끝에 붙여 넣기
ui->textEditRxData->show(); // 창에 display
// LCD 창에 출력
// Buffer = Buffer.right(2); // right(2) : [Tmp]25 맨 오른쪽부터 2자리를 자른다.
// Buffer에는 25가 들어 있다. 25는 utf8 모드
// temp_digit = Buffer.toDouble(); // Buffer에 있는 내용을 double로 변환
temp_digit = Buffer.mid(5, 2).toDouble();
ui->lcdNumber->display(temp_digit); // LCD 창에 출력
hydr_digit = Buffer.right(2).toDouble();
ui->lcdNumber_2->display(hydr_digit);
qDebug() <<"Message From :: " << sender.toString();
qDebug() <<"Port From :: "<< senderPort;
qDebug() <<"Buffer :: " << Buffer;
add_point(time_, temp_digit);
time_+=3;
ui->plot->xAxis->setRange(0, time_+3);
plot();
}
void MainWindow::add_point(double x, double y){
qv_x.append(x);
qv_y.append(y);
}
void MainWindow::clear_data(){
qv_x.clear();
qv_y.clear();
}
void MainWindow::plot(){
ui->plot->graph(0)->setData(qv_x, qv_y);
ui->plot->replot();
ui->plot->update();
}
MainWindow::~MainWindow()
{
delete ui;
}
// 생성 경로 : send --> 마우스우클릭 --> go to slot --> click
void MainWindow::on_pushButtonSend_clicked()
{
QByteArray Data;
Data = ui->lineEditSendData->text().toUtf8();
socket->writeDatagram(Data, QHostAddress("10.10.15.91"), 9999);
// 10.10.15.91 : STM32 IP
}
void MainWindow::on_checkBoxLED1_stateChanged(int arg1)
{
QString buffer;
QByteArray SendData;
buffer.sprintf("LED001\n");
SendData = buffer.toUtf8(); // ascii는 utf8과 값이 동일하여 변환을 굳이 할 필요 없다 (한글은 꼭 해야 함)
socket->writeDatagram(SendData, QHostAddress("10.10.15.91"), 9999);
}
void MainWindow::on_checkBoxLED2_stateChanged(int arg1)
{
QString buffer;
QByteArray SendData;
buffer.sprintf("LED002\n");
SendData = buffer.toUtf8(); // ascii는 utf8과 값이 동일하여 변환을 굳이 할 필요 없다 (한글은 꼭 해야 함)
socket->writeDatagram(SendData, QHostAddress("10.10.15.91"), 9999);
}
void MainWindow::on_checkBoxLED3_stateChanged(int arg1)
{
QString buffer;
QByteArray SendData;
buffer.sprintf("LED003\n");
SendData = buffer.toUtf8(); // ascii는 utf8과 값이 동일하여 변환을 굳이 할 필요 없다 (한글은 꼭 해야 함)
socket->writeDatagram(SendData, QHostAddress("10.10.15.91"), 9999);
}
// SERVO: 999
void MainWindow::on_dial_servo_valueChanged(int value)
{
QByteArray servo_data = "SERVO:";
servo_data.append(QString::number(ui->dial_servo->value()));
ui->lcdNumber_servo->display(ui->dial_servo->value());
socket->writeDatagram(servo_data, QHostAddress("10.10.15.91"), 9999);
qDebug() << "servo data: " << servo_data << endl;
}
void MainWindow::on_dial_led_valueChanged(int value)
{
QByteArray led_data = "LED:";
led_data.append(QString::number(ui->dial_led->value()));
ui->lcdNumber_led->display(ui->dial_led->value());
socket->writeDatagram(led_data, QHostAddress("10.10.15.91"), 9999);
qDebug() << "led data: " << led_data << endl;
}
void MainWindow::on_horizontalSlider_DHT11_Interval_valueChanged(int value)
{
QByteArray interval_data = "DHT11:";
interval_data.append(QString::number(ui->horizontalSlider_DHT11_Interval->value()));
ui->lcdNumber_slider->display(ui->horizontalSlider_DHT11_Interval->value());
socket->writeDatagram(interval_data, QHostAddress("10.10.15.91"), 9999);
qDebug() << "interval data: " << interval_data << endl;
}
void MainWindow::on_pushButton_Clear_clicked()
{
clear_data();
time_ = 0;
}Linux BSP
리눅스 가상환경 세팅
Virtual Box 다운로드 Extension Pack 다운로드
Extension Pack 다운로드 가상환경 링크
가상환경 링크
Desktop image 다운받기 다운로드 링크
다운로드 링크
순서
- 가상머신 새로 만들기
- 이름 : ubuntu20.04
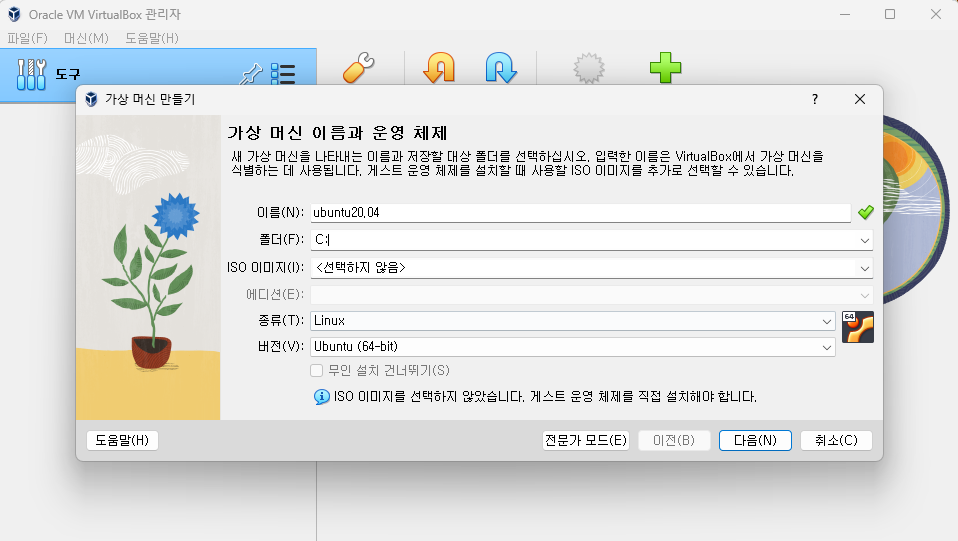
- 메모리 : 8192MB (우분투 실행 시에만 메모리를 잡음)
- 프로세서: 4개
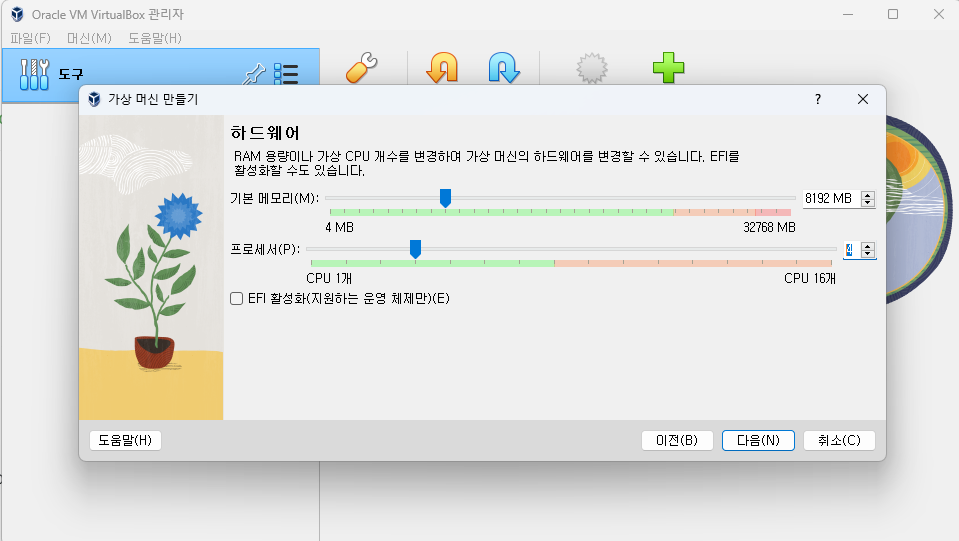
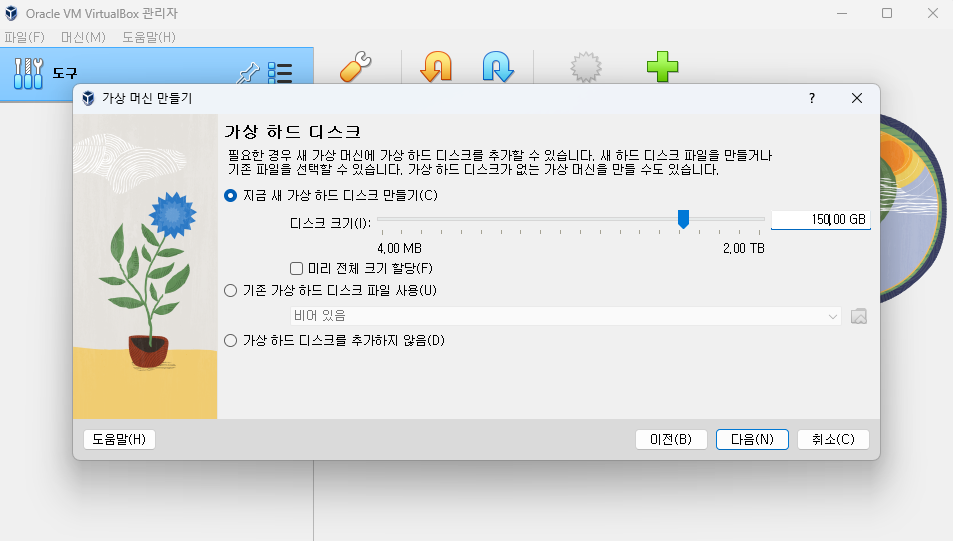
- 하드디스크 : 150Gb (최소 50gb 정도 잡으면 됨)
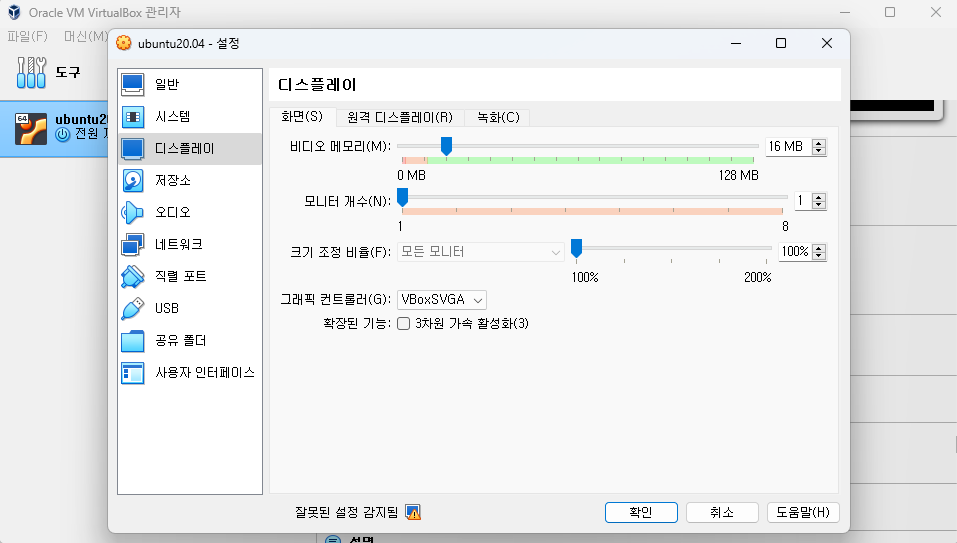
- 설정 -> 디스플레이 -> 그래픽컨트롤러 : VBoxSVGA
저장소 -> 광학 드라이버 -> ubuntu20.04.6.~.iso 선택

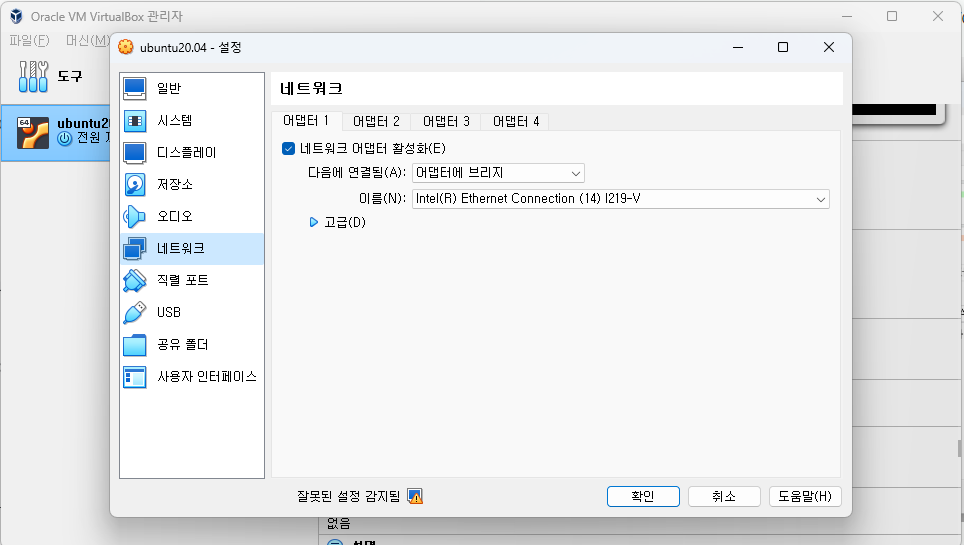
네트워크 -> 어댑터에 브리지 선택
7.시작 , 한국어 선택 , 우분투 설치 , 일반설치 , 설치중 업데이트 안함 체크 해제
이름 : ubuntu, 컴퓨터 이름 : ubuntuXX (01~23 : 윈도우 IP 끝번호) , 암호 설정 -> 설치 완료
8.재부팅 후 설정 -> 네트워크 -> ipv4 -> ip :10.10.141.xx (윈도우IP+30), 넷마스크 : 255.255.255.0 게이트웨이 : 10.10.141.254, DNS : 8.8.8.8
- $ sudo apt update ; sudo apt upgrade
- $ sudo apt install net-tools
- $ ifconfig ==> 설정 IP확인 및 인터넷 접속 확인
- ssh , samba 설치(첨부파일 참고)
ROS 수업용 패키지 먼저 설치(리눅스 BSP 수업 이후 진행할 패키지 의존성때문에 먼저 설치)
13. ROS 메뉴얼 https://emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/#pc-setup
설치 버전 Noetic
14.이메뉴얼 참고하여 설치
3.1.2 (Install ROS on Remote PC) 부터 설치 후 종료
15.VirtualBox -> 파일 -> 가상머신 내보내기

I mean