
좌표계 (Coordinate System)
직각 좌표계, 원통 좌표계, 구 좌표계
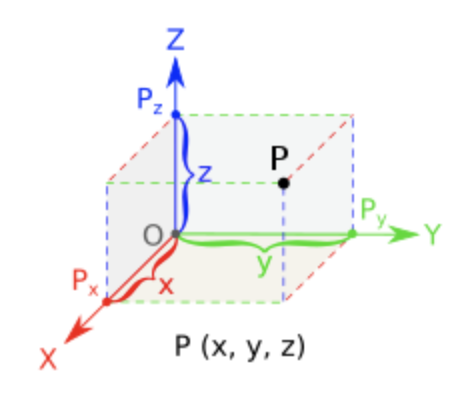
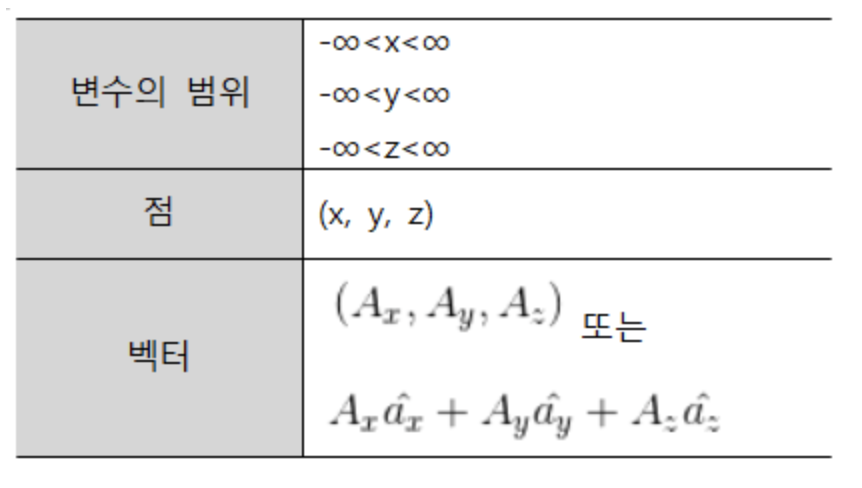
직각 좌표계 (cartesian coordinate system
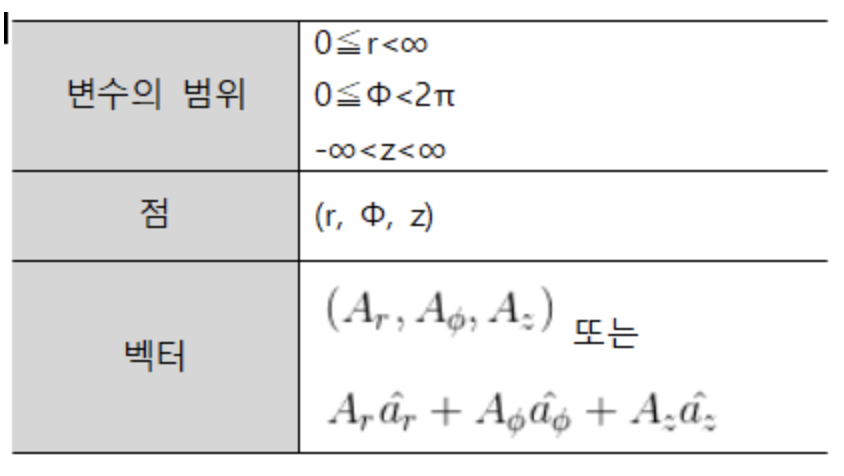
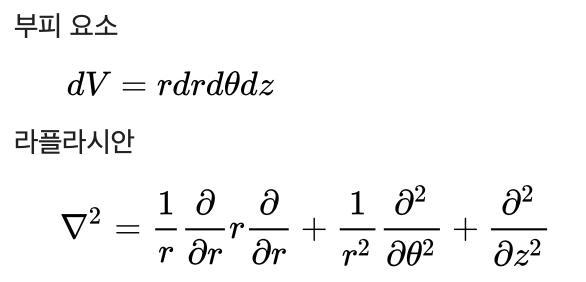
원통 좌표계 (circular cylindrical coordinate system)
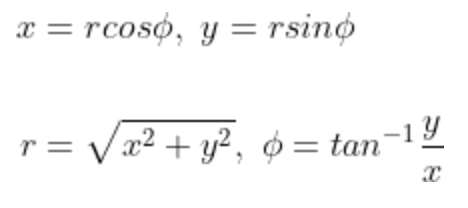
원통좌표계 (cylindrical coordinate system)는 3차원 공간을 나타내기 위한 좌표계이다.

원통좌표계는 반지름r(반경), 방위각Φ, 높이z 의 변수로 좌표를 표현한다.
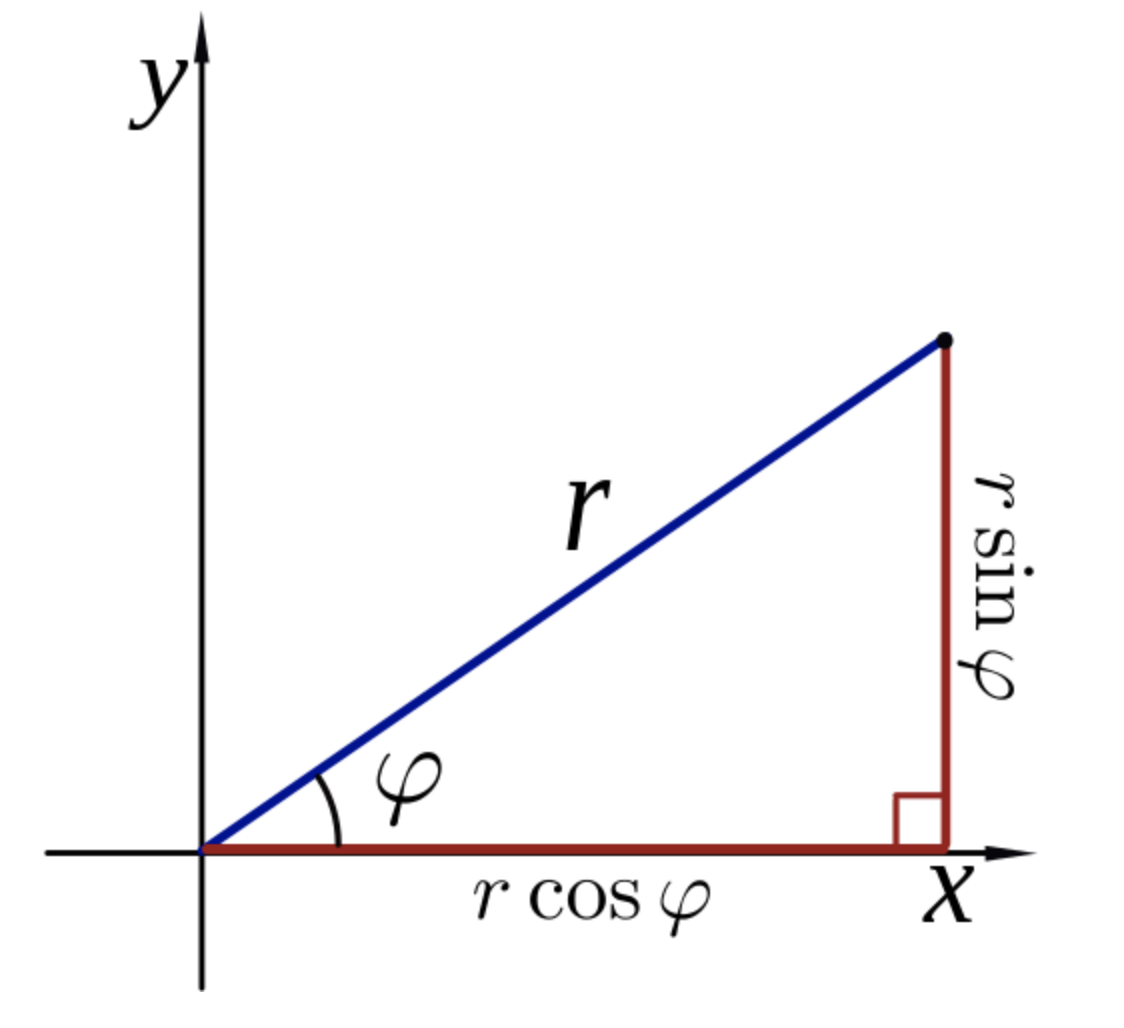
r은 원점 O에서 P의 xy평면으로의 사영 p까지의 거리를 나타낸다. 다시 말하면, r은 z축에서 P까지의 거리이다.
는 양의 x축 방향에서 반시계 방향으로 측정한 OP까지의 각이다.
z는 z와 같다.
좌표계가 직교좌표계이므로 세 단위벡터는 서로 수직이다.
직교좌표계에서 원통좌표계로의 변환
- 점 변환하기
z축은 동일하다.
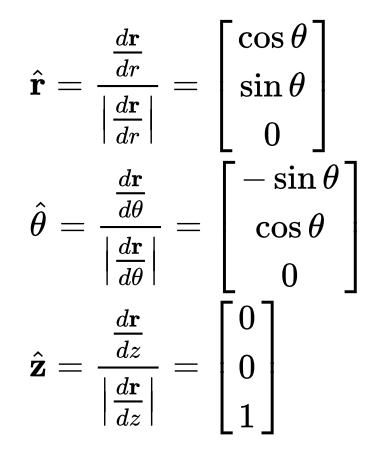
- 단위벡터 변환하기

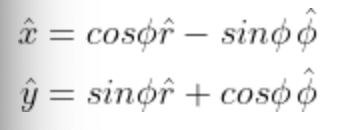
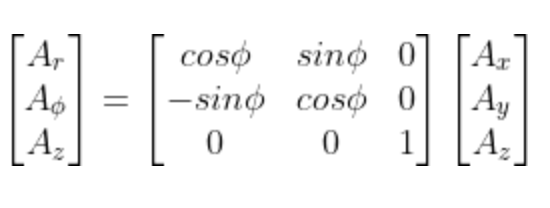
- 벡터 변환하기
단위벡터 변환한 것을 그대로 대입해서 정리하면 된다

추가 공식
영상 좌표계 (Coordinate System)
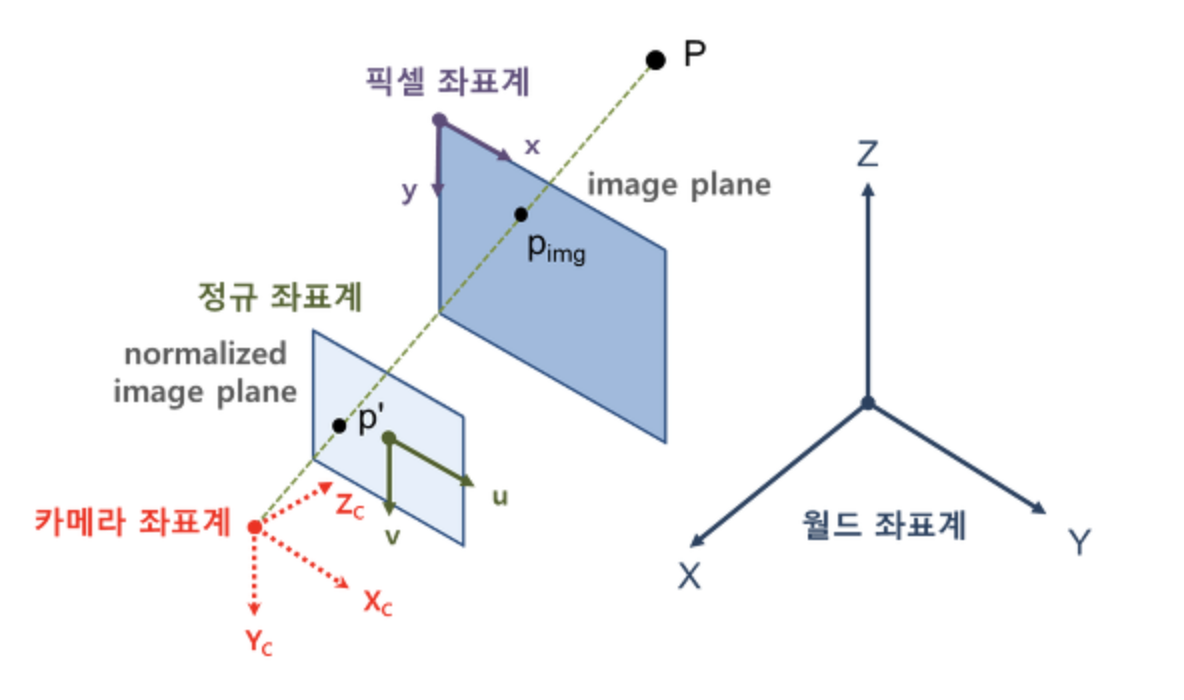
영상 Geometry에서는 크게 4가지 좌표계가 존재한다.
월드 좌표계, 카메라 좌표계, 정규 좌표계, 픽셀 좌표계
월드 좌표계와 카메라 좌표계는 3차원 좌표계이고, 정규좌표계와 픽셀좌표계는 2D 좌표계입니다
월드 좌표계 (World Coordinate System)
우리가 사물(물체)의 위치를 표현할 때 기준으로 삼는 좌표계입니다. 월드좌표계는 어디 하늘에서 주어져 있는 것이 아니라 문제에 따라서 우리가 임의로 잡아서 사용할 수 있는 좌표계입니다. 예를 들어, 자신의 안방 한쪽 모서리를 원점으로 잡고 한쪽 벽면 방향을 X축, 다른쪽 벽면 방향을 Y축, 하늘을 바라보는 방향을 Z축으로 잡을 수 있습니다. 좌표의 단위(unit)는 미터(meter)로 해도 되고 센티미터(centimeter)로 해도 됩니다. 중요한 점은 좌표계는 일종의 약속(protocol)이기 때문에 제시한 점이 어떤 위치인지 그 문제 내에서 만큼은 유일하게 결정될 수 있으면 되는 것입니다. 이 글에서는 월드좌표계 상의 점을 다음과 같이 대문자로 표기합니다.
카메라 좌표계 (Camera Coordinate System)
월드 좌표계가 우리가 살고 있는 공간의 한 지점을 기준으로 한 좌표계라면 카메라 좌표계는 카메라를 기준으로 한 좌표계입니다. 카메라 좌표계는 아래 그림과 같이 카메라의 초점(렌즈의 중심)을 원점, 카메라의 정면 광학축 방향을 Z축, 카메라 아래쪽 방향을 Y축, 오른쪽 방향을 X축으로 잡습니다. 기호는 월드좌표계와 구분하기 위해 아랫첨자 c를 사용하겠습니다.
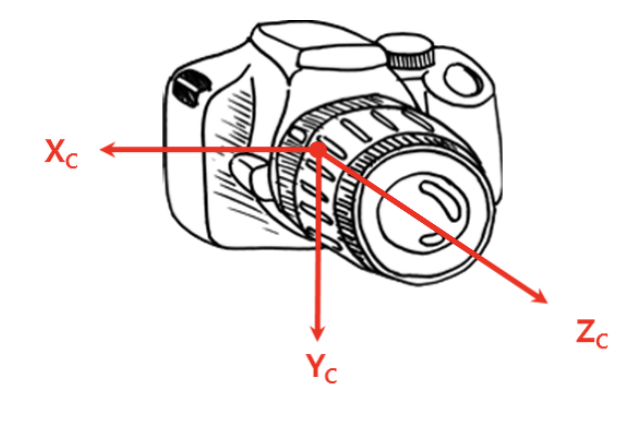
카메라 좌표계의 단위는 물론 월드좌표계와 동일해야 할 것입니다. 즉, 월드 좌표계에서 meter 단위를 사용한다면 카메라 좌표계도 meter 단위를 사용합니다. 이 글에서는 카메라 좌표계를 기준으로 한 점의 좌표는 다음과 같이 아랫첨자 c를 사용한 대문자로 표기합니다.

픽셀 좌표계 (Pixel Image Coordinate System)
보통은 영상좌표계(Image Coordinate System)라고 불립니다. 픽셀 좌표계는 우리가 실제 눈으로 보는 영상에 대한 좌표계로서 이미지의 왼쪽상단(left-top) 모서리를 원점, 오른쪽 방향을 x축 증가방향, 아래쪽 방향을 y축 증가방향으로 합니다. 그리고 픽셀 좌표계의 x축, y축에 의해 결정되는 평면을 이미지 평면 (image plane)이라 부릅니다.
기하학적으로 볼 때, 3D 공간상의 한 점 P = (X,Y,Z)는 카메라의 초점 (또는 렌즈의 초점)을 지나서 이미지 평면의 한 점 pimg = (x, y)에 투영(projection) 됩니다. 알다시피 점 P와 점 pimg를 잇는 선(ray) 상에 있는 모든 3D 점들은 모두 pimg로 투영됩니다. 따라서 3D 점 P로부터 pimg는 유일하게 결정할 수 있지만, 반대로 영상 픽셀 pimg로부터 P를 구하는 것은 부가적인 정보 없이는 불가능합니다.
어쨌든 픽셀 좌표계의 단위는 픽셀(pixel)이며, 픽셀 좌표는 다음과 같이 소문자로 표기합니다.
정규 좌표계 (Normalized Image Coordinate System)
마지막으로 가장 중요한 정규좌표계입니다. 원래는 정규 이미지 좌표계이지만 줄여서 정규 좌표계로 쓰겠습니다. 지금까지 나온 좌표계는 모두 매우 직관적인 좌표계이지만 정규 좌표계는 편의상 도입된 가상의 좌표계입니다.
정규 좌표계를 한마디로 설명하자면 카메라의 내부 파라미터(intrinsic parameter)의 영향을 제거한 이미지 좌표계로 볼 수 있습니다. 또한 정규 좌표계는 좌표계의 단위를 없앤(정규화된) 좌표계이며 카메라 초점과의 거리가 1인 가상의 이미지 평면을 정의하는 좌표계입니다.
좀더 쉽게 생각하자면, 원래의 이미지 평면을 평행이동시켜서 카메라 초점과의 거리가 1인 지점으로 옮겨놓은 이미지 평면을 생각하면 됩니다.
정규 좌표계의 원점은 정규 이미지 평면의 중점(광학축 Zc와의 교점)입니다 (그림 1 참조). 픽셀 좌표계와 원점의 위치가 다름에 주의하기 바랍니다. 그리고 좌표축은 픽셀 좌표계와 구분하기 위해 u, v를 사용하겠습니다.
카메라 내부 파라미터를 알면 다음과 같이 픽셀 좌표와 정규 좌표 사이의 변환이 가능합니다.
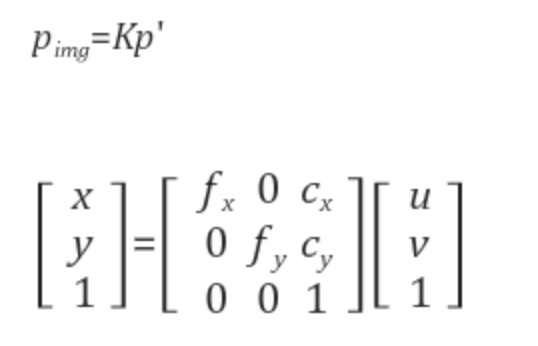
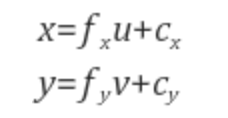
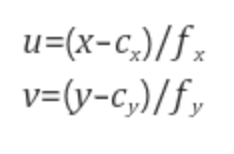
여기서 fx, fy는 초점거리, cx, cy는 주점(principal point, 광학축과 영상평면이 만나는 픽셀좌표)이며, 가운데 3 x 3 행렬을 camera matrix라 부릅니다. 위 식을 정리하면 다음과 같은 식이 됩니다.
역으로, 이미지 상의 픽셀 (x, y)에 대응하는 정규좌표는 다음과 같이 계산됩니다.
굳이 정규 이미지 평면과 정규 좌표계를 도입한 이유
우리가 동일한 장면을 동일한 위치와 동일한 각도에서 찍더라도 사용한 카메라에 따라서 또는 카메라 세팅에 따라서 서로 다른 영상을 얻게 됩니다. 그런데, 이러한 카메라 간의 차이는 어떤 일관된 기하학적인 해석을 하는데 있어서 불필요한 요소일 것입니다. 따라서, 이러한 요소를 제거한 정규화된 이미지 평면에서 공통된 기하학적 특성을 분석하고 이론을 수립하는 것이 보다 효과적이기 때문입니다.
