voxblox
1.[voxblox] ICP

파일 icp.h에 정의됨Struct ICP::Config기존 TSDF(Truncated Signed Distance Function) 정보와 포인트 클라우드를 정렬하여 정합하는 ICP(Iterative Closest Point) 방식으로 포인트 매칭을 수행하는 클래스이
2.[voxblox] 논문리뷰
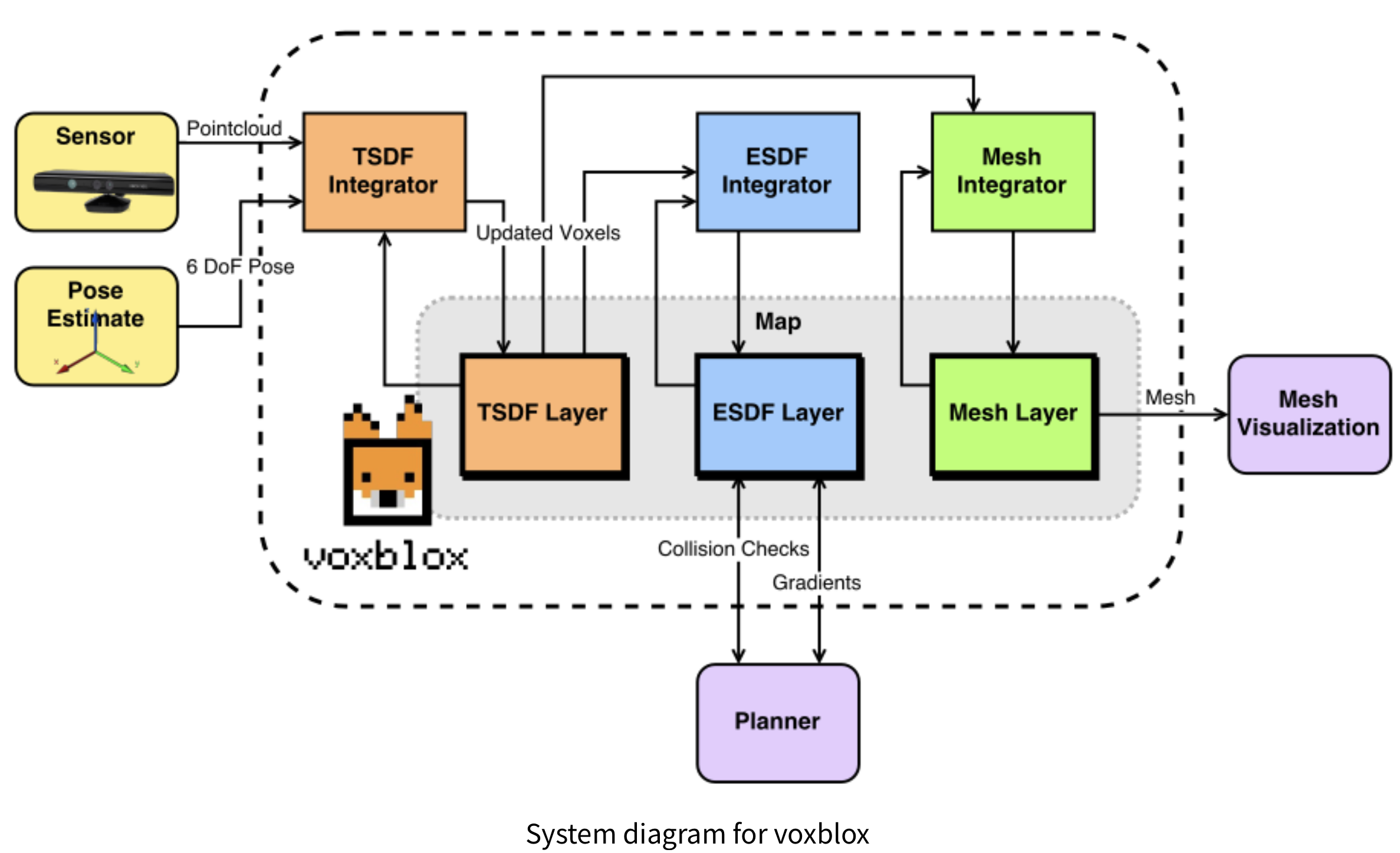
TSDF와 ESDFhttps://velog.io/@jk01019/Signed-Distance-FieldMap을 3차원으로 표현할 때에 일반적으로 사용되는 것이 occupancy grid map, octomap 으로occupancy probabilty를 저장하기
3.Signed Distance Field (SDF)
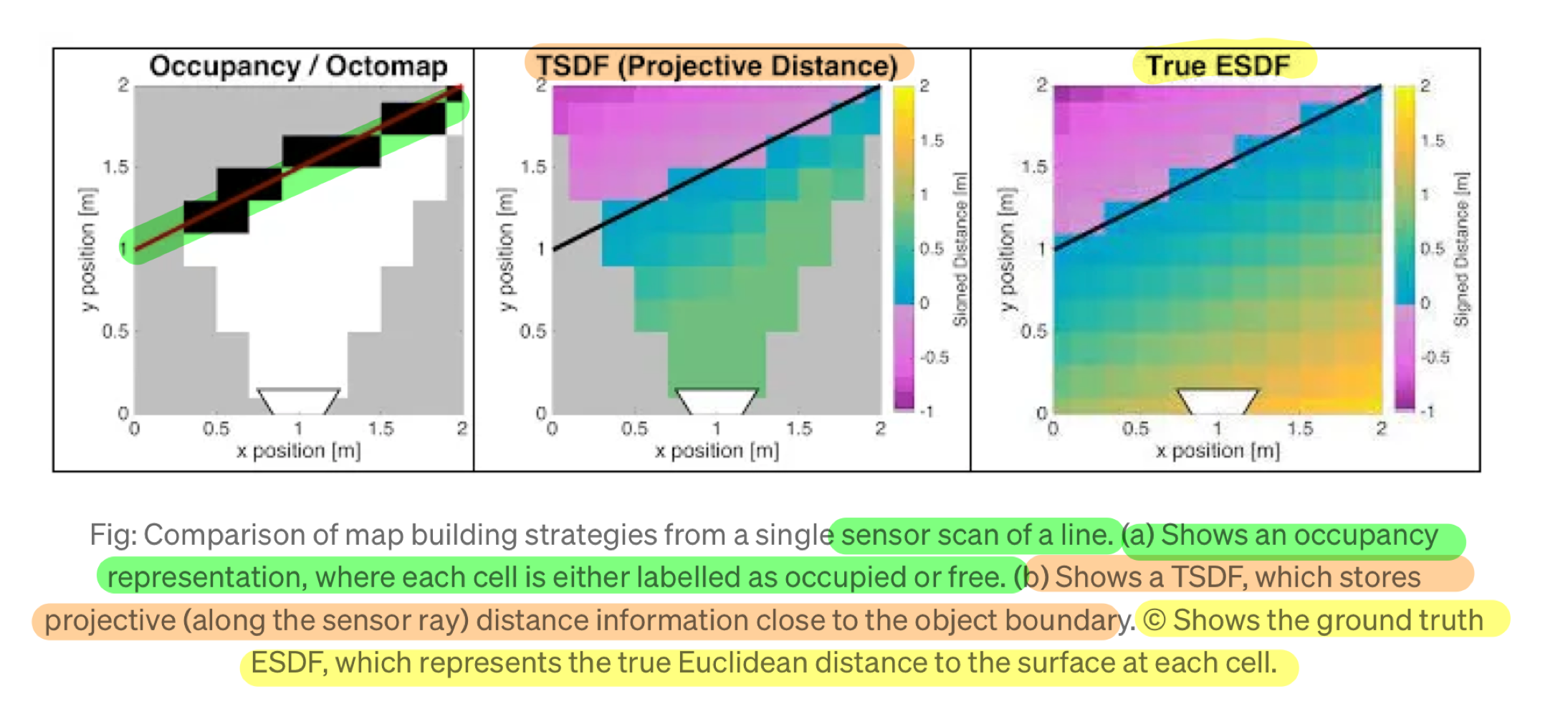
Signed Distance Field (SDF)충돌 검지와 충돌 cost를 계산하는데 쓰임octomap은 laser 측정을 위해 design 되었는데, laser은 센서와의 거리에 따라 정확도가 떨어지지 않음하지만, vision-based depth sensing은
4.[voxblox] code run

Voxblox를 테스트해보는 가장 쉬운 방법은 데이터셋을 사용해보는 것우리는 자체 데이터셋, Euroc Vicon Room 데이터셋, 그리고 kitti_to_rosbag을 통해 처리된 KITTI 원본 데이터셋에 대한 launch 파일을 제공이 데이터셋 각각에 대해, v
5.[voxblox] voxblox_ros/launch/rgbd_dataset.launch
0. 사용법 이 launch 파일은 먼저 ROSBAG 파일을 재생하여 기록된 데이터를 불러옵니다. 그런 다음, voxblox_ros의 TSDF 서버 노드를 실행하여 포인트 클라우드 데이터를 처리하고, TSDF 기반의 3D 지도를 생성 이 과정에서 특정 파라미
6.[voxblox] voxblox_ros/src/tsdf_server.cc
0. 참고자료 0.1. 역링크 https://velog.io/@jk01019/voxblox-rgbddataset.launch 0.2. 링크 tsdf_map: https://velog.io/@jk01019/voxblox-tsdfmap.h tsdf_integrator: https://velog.io/@jk01019/voxblox-voxbloxsrcintegr...
7.[voxblox] voxblox/src/core/tsdf_map.cc
test
8.[voxblox] voxblox/src/integrator/tsdf_integrator.cc
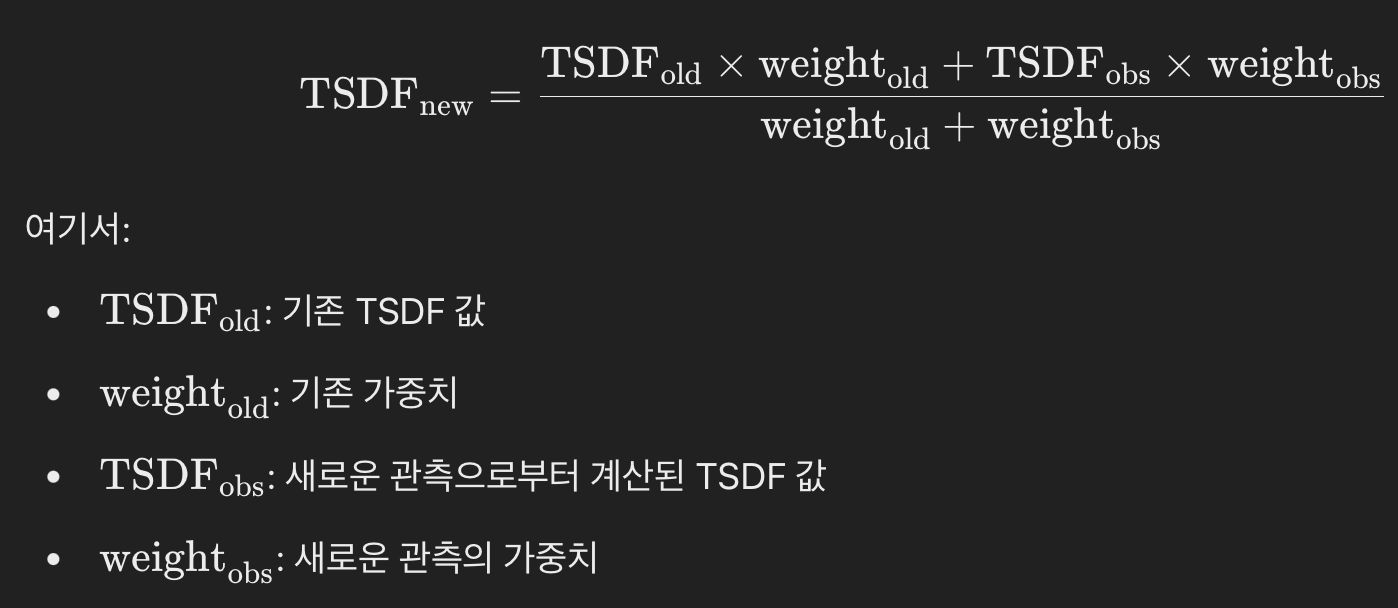
2\. .cc
9.[voxblox] voxblox/src/alignment/icp.cc
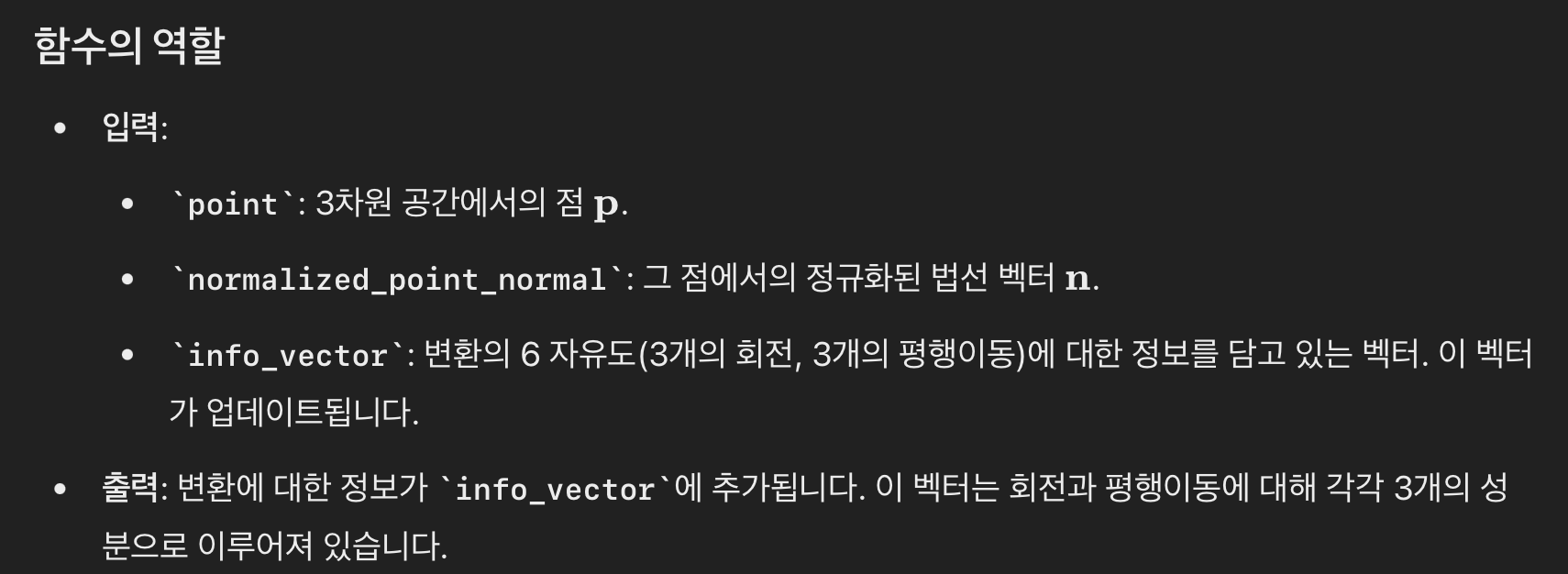
이 .h 파일은 ICP (Iterative Closest Point) 알고리즘을 통해 포인트 클라우드와 TSDF 맵을 정렬(또는 맞추는)하는 클래스를 정의합니다. ICP는 두 점군을 정렬하여 변환(회전 및 이동)을 추정하는 알고리즘으로, 로봇 및 드론에서 사용되는 3D
10.[voxblox] installation
Voxblox를 설치하려면 ROS Indigo(14.04), ROS Kinetic(16.04) 또는 ROS Melodic (18.04)을 설치해야 함이 지침은 Ubuntu를 위한 것이며, Voxblox는 OS X에서도 실행할 수 있지만, 그 경우에는 스스로 설정해야 합