A* 알고리즘
그래프/트리의 탐색 알고리즘으로 길찾기 알고리즘이다. 게임에서 많이 사용되며 다익스트라의 확장판, BFS의 가지치기 알고리즘이라 생각하면 된다. 따라서 휴리스틱 알고리즘이기도 하다.
1. 휴리스틱 추정값
- f(x) = h(x) + g(x)
- f(x): 출발 노드에서 목적지 노드까지 경로의 총 가중치 합
- h(x): 현재 노드에서 목적지 노드까지의 추정 경로 가중치(휴리스틱)
- g(x): 현재 노드에서 출발 지점까지의 경로 가중치
- f(x)가 가장 최소가 되는 노드를 다음 탐색 노드로 선정
- 이를 위해 우선순위 큐를 사용h(x)가 휴리스틱 함수이기 때문에 해당 함수를 어떻게 설계하냐에 따라 알고리즘의 성능이 달라진다. 대표적으로 맨해튼 거리 함수와 유클리디안 거리 함수가 있다.
2. 실행 과정
-
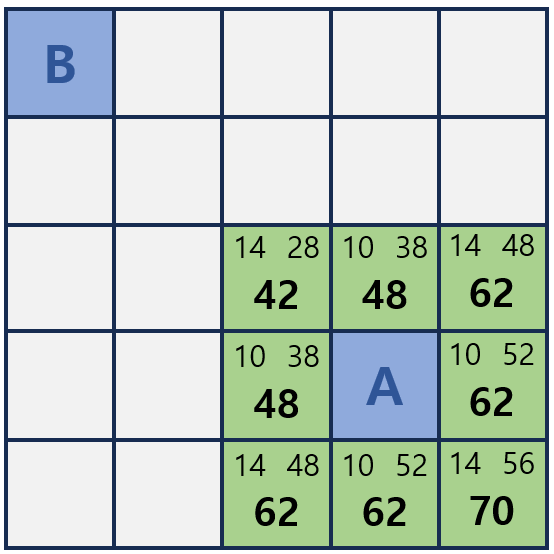
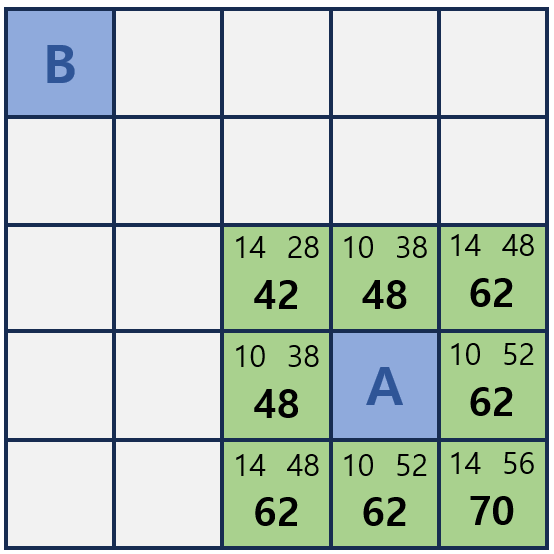
A에서 B로 이동
-
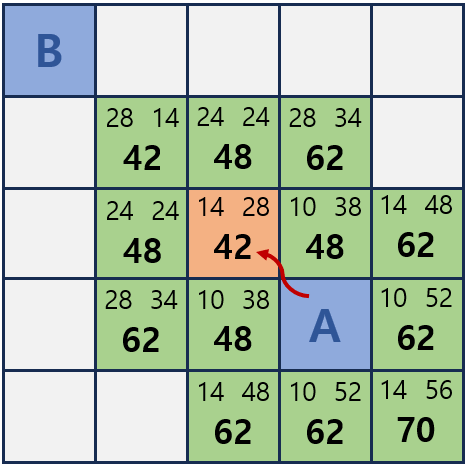
A주변 노드의 f(n)을 계산 후 가장 작은 노드를 다음 탐색 노드로 선정
-
B에 도달할 때까지 반복
-
B에 도달했다면, 최소 비용 경로를 역추적하여 결과를 얻음
3. 구현
- 시작 노드에서 검색된 인접사각형들을 열린 목록에 넣음
1-1. 만약 인접한 사각형이 갈 수 없는 곳이거나 닫힌 목록 상에 있다면 무시
1-2. 만약 인접한 사각형이 열린 목록에 없다면, 열린 목록에 추가하고, 이 사각형의 부모를 현재 사각형으로 지정및 해당 사각형의 F,G,H 비용을 기록
1-3. 이미 열린 목록에 있다면, G비용을 이용해 해당 사각형이 더 나은지 확인 후 부모 사각형을 바꿈, G, F비용을 다시 계산 - 아래 과정을 반복
1) 열린 목록에서 가장 낮은 F비용을 찾아 현재 사각형으로 선택
2) 이것을 열린 목록에서 꺼내 닫힌 목록으로 넣음 - 중단 조건
3-1. 목표지점을 열린 목록에 추가한 경우
3-2. 열린 목록이 비어있을 경우(실패 경우)
- 소스코드(해당 코드는 UE상에서 구현되는 코드이며 알고리즘이 동작하는 코드 부분입니다.)
while (OpenNodes.Num() != 0) {
OpenNodes.StableSort([](const AGridNode& node1, const AGridNode& node2) {return node2 > node1;}); //기존 순서를 유지하며 정렬
CurrentNode = OpenNodes.Pop();
if (CurrentNode == GoalNode) break; //목적지를 찾아 종료
TArray<AGridNode*> ChildNodes = Grid->GetValidNeighbors(CurrentNode); //주변 노드들을 자식노드로 들고옴
for (auto& ChildNode : ChildNodes) {
int currentcost = CurrentNode->cost + CostNodes(CurrentNode, ChildNode); //비용 계산
if (OpenNodes.Contains(ChildNode)) { //해당 노드가 열린 목록에 있다면
if (ChildNode->cost <= currentcost) continue; //이전에 계산한 비용이 방금 계산한 비용보다 작다면 아래 내용을 수행할 필요가 없음
}
else if (ClosedNodes.Contains(ChildNode)) { //해당 노드가 닫힌 목록에 있다면 무시
continue;
}
else {
OpenNodes.Add(ChildNode);
SetOpenNode(ChildNode);
TotalOpenNodes++;
ChildNode->heuristic = Heuristic(ChildNode); //휴리스틱값을 계산
}
ChildNode->cost = currentcost;
ChildNode->parent = CurrentNode;
}
ClosedNodes.Add(CurrentNode);//현재노드는 탐색이 종료된 노드로 간주
ExploredNodes++;
SetClosedNode(CurrentNode);
}4. 다른 길찾기 알고리즘과 다른점
A*알고리즘은 대표적으로 다익스트라와 많이 비교되곤 한다. 다익스트라와 A*의 차이점은 휴리스틱 함수의 사용 유무이다.
- 휴리스틱 함수 사용: 휴리스틱 함수를 사용함으로서 현재 노드부터 목적지까지의 거리를 추정한다.
- 성능: 휴리스틱 함수를 사용하여 불필요한 경로의 탐색을 피할 수 있어 더 빠른 솔루션을 찾게 한다.
결론적으로 A*에서 휴리스틱의 가중치를 0으로 설정한다면 다익스트라가 되는것이다.
5. 결과
그냥 하자