스펀지
1.데이터 세트의 종류엔 뭐가 있을까?

보통 머신러닝이나 딥러닝에서 데이터 세트는 크게 세 가지로 나뉩니다.학습데이터(Training Data): 모델이 학습하는 데 사용되는 데이터검증데이터(Validation Data): 학습 중 모델의 성능을 평가하는 데 사용되는 데이터. 이 데이터를 사용하여 하이퍼파라
2.모델의 성능을 평가하는 지표에는 무엇이 있을까?
머신러닝 및 딥러닝 모델의 성능을 평가하는 여러 가지 지표가 있습니다. 이러한 지표들은 문제의 유형(회귀, 분류, 클러스터링 등)에 따라 다르게 사용됩니다. 아래는 주요 평가 지표들의 목록입니다:분류 문제에 대한 평가 지표:정확도 (Accuracy): 전체 예측 중 올
3.Network와 Arichiture와 Model은 뭐가 다를까?
아키텍처, 네트워크, 모델은 인공지능 및 딥러닝 분야에서 중요한 용어입니다. 각 용어의 의미와 그들 간의 주요 차이점은 다음과 같습니다:아키텍처 (Architecture):아키텍처는 딥러닝 모델의 기본 설계나 구조를 나타냅니다.네트워크의 레이어 구성, 유형 (예: CN
4.Permutation invariance와 Rigid motion invariance
참고Permutation invariance란 주로 순서가 바뀌더라도 결과나 출력이 변경되지 않아야 함을 나타내는 특성입니다. 즉, 입력의 순서와 무관하게 결과가 동일하게 유지되어야 한다는 것을 말하죠.point cloud에서는 각 point들이 unordered 상태
5.Point cloud란?
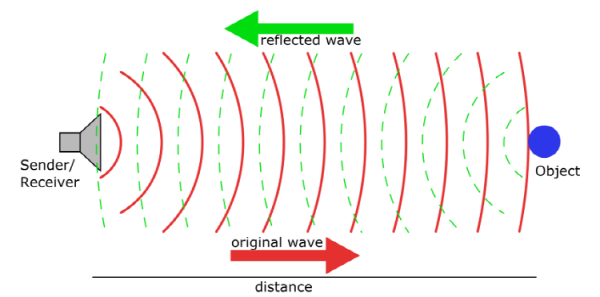
스테레오 깊이 추정(또는 스테레오 불일치 추정, Stereo Disparity Estimation)은 스테레오 카메라 시스템에서 사용되는 기술로, 두 카메라 간의 픽셀 또는 피처의 위치 차이(disparity)를 계산하여 장면의 깊이 정보를 추정합니다. 스테레오 카메
6.Monocular depth estimation & Stereo disparity estimation
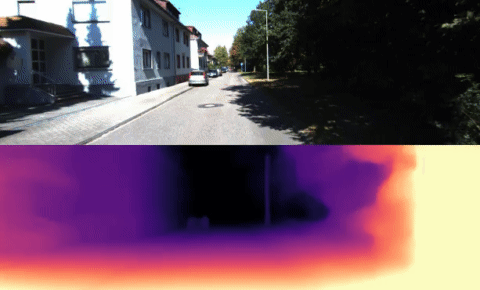
Monocular Depth Estimation Monocular depth estimation은 이미지 또는 비디오 소스에서 단일 카메라 (monocular)의 시점에서 장면의 깊이 정보를 예측하는 기술입니다. 즉, 2D 이미지에서 3D 정보를 추론하려는 노력입니다.
7.Monocular depth estimation & Stereo disparity estimation
Monocular Depth Estimation Monocular depth estimation은 이미지 또는 비디오 소스에서 단일 카메라 (monocular)의 시점에서 장면의 깊이 정보를 예측하는 기술입니다. 즉, 2D 이미지에서 3D 정보를 추론하려는 노력입니다.