PseudoInverse-guided diffusion models for Inverse Problems
Intro
Diffusion generative models을 활용해 inverse 문제를 해결하는 방식은 크게 두 가지로 나눌 수 있습니다. 하나는 각 task마다 별도의 학습이 필요한 problem-specific 방법론이고, 다른 하나는 posterior sampling을 활용한 problem-agnostic 접근법입니다. 이번에 소개해드릴 논문 "PseudoInverse-guided Diffusion Models for Inverse Problems"는 독창적인 방법으로 problem-agnostic한 접근을 택하면서도, problem-specific 방법론에 견줄 만큼 뛰어난 성능을 보여줍니다. 특히, problem-agnostic한 방법은 사전에 학습된 diffusion model을 plug-in 방식으로 활용할 수 있어, computational resource 비용이 절감된다는 장점이 있습니다.
Problem formulation
위와 같은 함수 와 노이즈 를 통해 가 로 변환됩니다. 이때 inverse problem에서는 만이 관찰 가능(measurable)하며, 와 는 관찰할 수 없습니다. 따라서 inverse problem의 목표는, 측정된 만을 활용하여 를 복원하는 것입니다.
Reverse Sampling for Diffusion models

한편, diffusion sampling은 위의 식을 따라 reverse sampling이 진행됩니다. 이 과정에서 대신 학습된 score network (pretrained diffusion model)가 활용됩니다. Diffusion model을 이용해 inverse 문제를 해결하기 위해서는, measurement 가 주어졌을 때 대신 를 사용하여, 의 정보를 더 많이 반영하고 원하는 데이터로 수렴할 수 있도록 컨트롤하는 것이 필요합니다.
Bayes' rule & Approximation
reverse sampling에서 중요한 역할을 하는 는 베이즈 법칙에 따라 다음과 같이 표현할 수 있습니다:
이때, 첫 번째 항인 는 학습된 score network 로 근사할 수 있습니다.
두 번째 항인 는 가이던스 텀(guidance term)으로, 아래의 수식과 같이 근사할 수 있습니다:
위 수식에서:
- Vector:
- Jacobian:
가 0인 noiseless assumption을 추가하면 아래와 같이 pseudo-inverse operator를 활용해서 나타낼 수도 있습니다.
여기서, 는 시간에 따라서 점점 증가하도록 heuristic 하게 설계되었습니다.
Approximation Details
아래의 식이 유도되는 과정을 좀더 자세하게 설명해보겠습니다.
DPS: Diffusion Posterior Sampling for General Noisy Inverse Problems
에서 probablistic graph를 설명하며 아래와 같은 관계를 이끌어 냈던 적이 있죠.
본 논문에서는 로 를 근사합니다.
가 주어졌을때 를 tweedi formula를 활용해 point estimation 할 수 있습니다. 이를 으로 표기합니다.
이때, multivariate Gaussian distribution의 수식 전개를 활용하여 아래의 관계를 도출할 수 있습니다. Gaussian distribution은 평균(mean)과 분산(variance)만으로 전체 분포를 설명할 수 있기 때문에, 이 두 가지를 구하는 데 집중하면 쉽게 이해할 수 있습니다.
이를 미분하면 원래 설명하고자 했던 approximation과 일치한다는 것을 확인할 수 있죠.
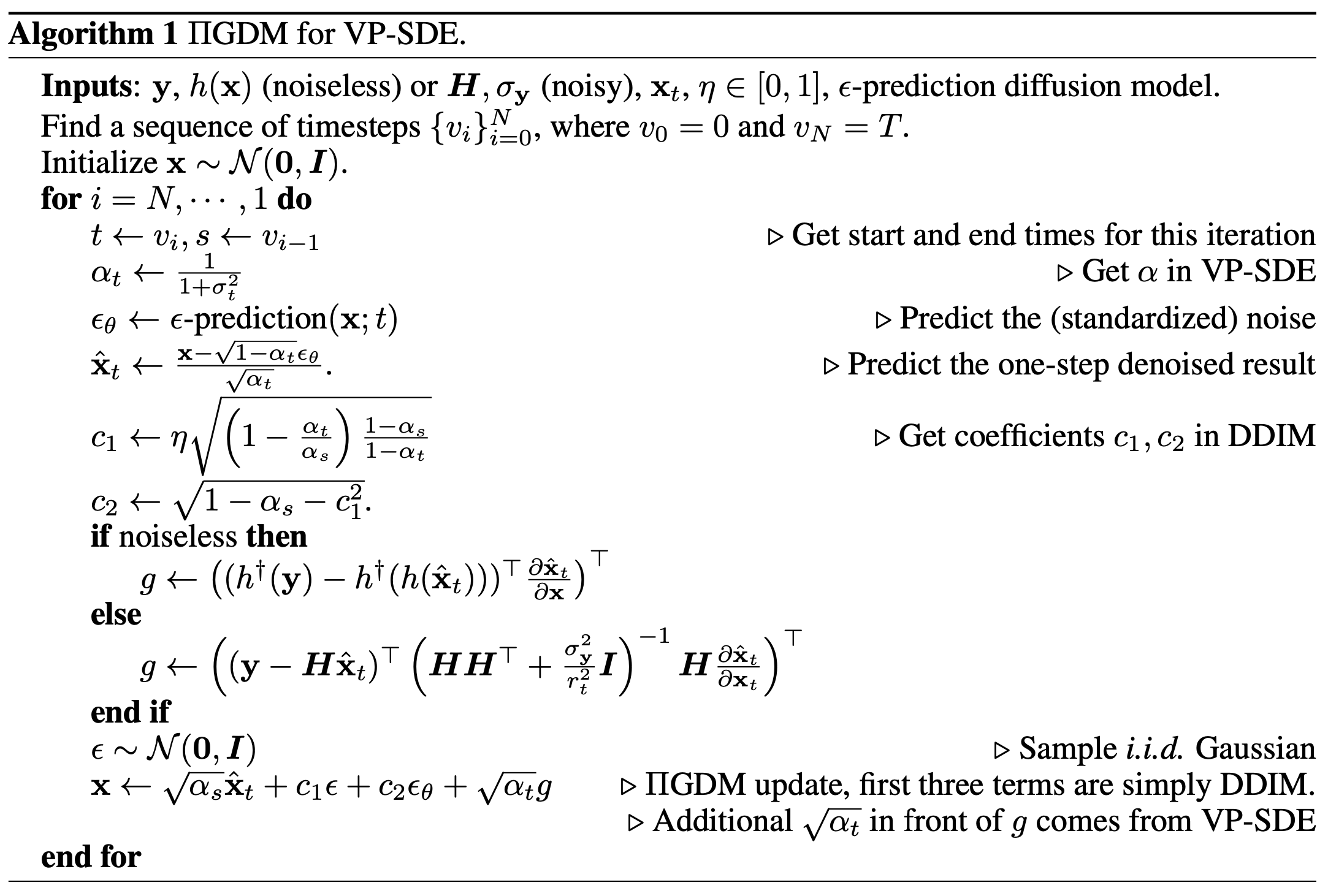
DDIM Reverse Sampling Process


한편, 본 논문에서는 one step (iterative reverse process의 for loop element step)을 DDIM의 sampling 방식을 활용했습니다. 따라서 DDIM의 sampling process를 확인해두는 것이 좋을 것 같아 첨부해봤습니다.
Reverse Sampling process

는 DDIM reverse sampling 과정과 완전히 일치하며, pseudo guidance term에 을 곱하여 를 denoise해 나갑니다. 이때 을 곱하는 것은 heuristic한 디자인이며, 직관적으로 이는 guidance term의 영향을 의 term에 independent 하도록 하려는 의도로 해석할 수 있습니다. (최종 알고리즘에선 단위 guidance에 적절한 weight을 곱해 더하도록 디자인 되어있음.)
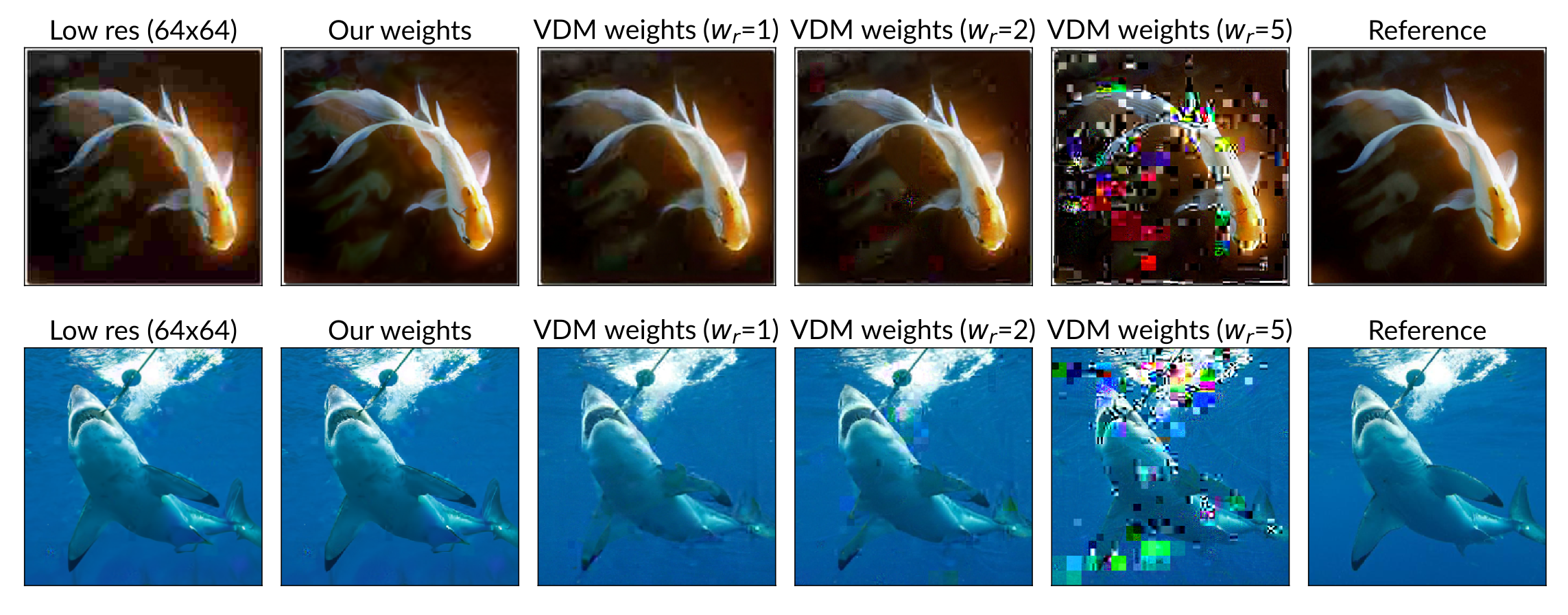
아래의 그림에서 heuristic design의 sample quality를 비교합니다. 본 논문에서 제안한 (heuristic) weight의 정당성을 어필합니다.
는 를 활용해 노이즈를 예측하고, 이를 바탕으로 의 추정치를 계산한 것입니다. DDIM에서 사용되는 , , 는 각 항의 가중치로, 이를 통해 이미지가 노이즈 예측을 통해 계산됩니다. 본 논문에서 제안하는 guidance term은 로 스케일링되는데, 이는 Variance Exploding (VE) SDE를 Variance Preserving (VP) SDE로 변환하는 과정에서 rescaling된 값입니다. 는 시그널의 가중치를 나타내며, reverse process에서 시간이 가 감소함에 따라 가 점점 커지므로, guidance의 영향력도 for loop을 반복하면서 점점 커집니다.
따라서, DDIM 기반의 sampling에서 measurement 에 대한 제어를 pseudo guidance를 통해 수행했다고 해석할 수 있습니다. 다만, 이 guidance term을 계산하는 과정이 computationally expensive하다는 점이 논문의 한계로 지적되고 있습니다.
다른 guidance model과의 비교

논문에서 첨부된 table에서 확인할 수 있듯이 Pseudoinverse guidance는 가 에 대해서 미분가능하지 않은 경우도 취급할 수 있다는 장점이 있습니다. 그 뿐만 아니라, Pseudoinverse operator가 reconstruction guidance에서 활용되었던 transpose operator 보다 훨씬 정교한 연산을 수행할 수 있다고 어필하고 있습니다. 더불어, 가 operator에 대해서 independent하여 consistent하다고 합니다.
실험 결과
super resolution과 inpainting task에서 problem-specific method (각 task dataset에 대해서) training 와 비교를 진행했습니다. 그 결과 본 논문에서 제시된 problem-agnostic method가 생산한 이미지의 퀄리티(FID)가 problem-specific method과 견줄만하다는 결론을 이끌어냈습니다. 게다거, ablation study를 통해서 pseudo guidance와 adaptive weight의 영향력을 입증했습니다.
제안된 방법은 별다른 training 없이도 problem에 대해서 training을 진행한 방법과 성능을 나란히 한다는 점과 non-differential function y에 대해서도 문제를 풀 수 있다는 점에서 의미가 깊습니다. 다만, pseudoinverse operator의 계산으로 인해 속도 측면에서 개선되어야할 점이 있다고 합니다.
끝~