
1. Motion Estimation (=Optical Flow)
- 화면 안에서 움직이는 피사체 / 움직이는 카메라 / 둘 다 움직인 경우에서의 분석(비디오)
- 이전 stiching은 서로 다른 두 이미지의 같은 부분을 찾고 관계를 찾아 붙이는 거고, optical flow는 프레임 별 이미지를 비교해서 찾아낸 움직임
- 연속적인 움직임을 갖는 이미지에서 움직임을 찾으려면 local로는 부족하므로 global도 봐야한다
Why estimate visual motion
- 화면 상에서의 움직임을 알아내서 역으로 적용하면 video stabilize할 수 있음 (손떨림 보정)
- 카메라가 움직일 때 생기는 motion parallax 현상(가까이 있는거 빠르게, 멀리 있는거 느리게)으로 물체와 카메라 사이 거리
z를 알아낼 수 있음
(Projective geometry의 한계 극복; ray상의 물체가 있는 것만 알았지 어디있는지 몰랐었는데 이제 알 수 있음)
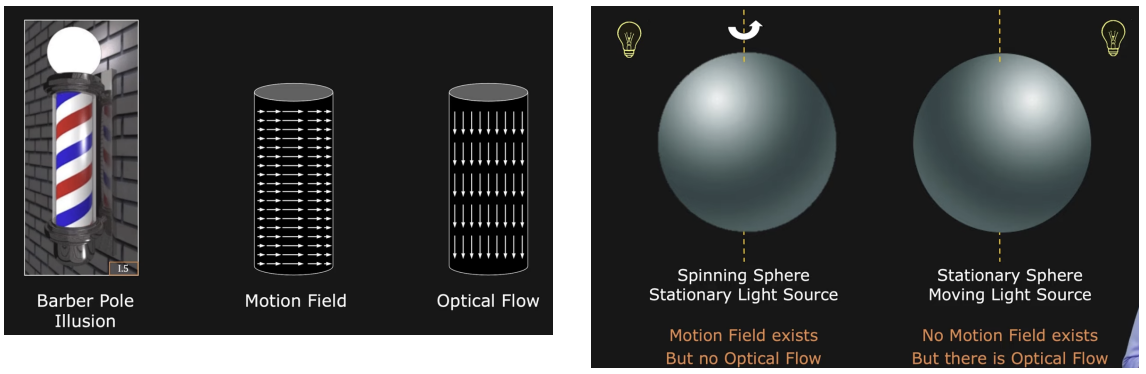
◾ Motion field and Optical flow
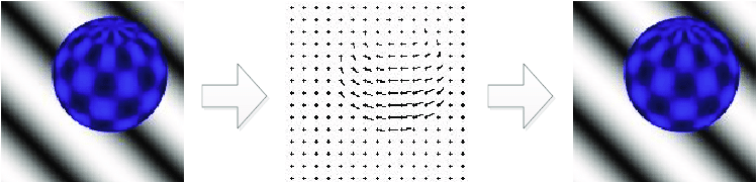
- Motion field: 3차원 world에서 점이 이동하면, image에 project될 때도 점이 이동하는데, 이때 이러한 점의 이동
- Optical flow: 하지만 실제 world의 상황은 모르고 projecet된 image만 고려하기 때문에 image에서 우리가 항상 motion field를 측정할 수 있다는 보장을 못해서, 항상 측정할 수 있는 밝기의 변화를 토대로 움직임을 측정하고자하고, 이때 이러한 밝기의 변화
- 각 픽셀마다 존재하는 optical flow로 motion field 구함
- sparse motion field: feature의 optical flow만 모음, feature 픽셀에 대해서만 방향과 거리가 나타남

- dense motion field: 모든 픽셀의 optical flow를 모음, 각 픽셀이 다음 프레임에서 어디로 이동하는지에 대한 방향과 거리가 나타남

- sparse motion field: feature의 optical flow만 모음, feature 픽셀에 대해서만 방향과 거리가 나타남
◾ Optical flow Constraint Equation
- Optical flow로 Motion field를 구할 때의 두 가지 조건 (필기 참고)
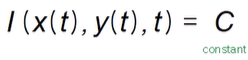
- 이미지의 밝기는 변하지 않는다
- 이미지의 특정 픽셀이 움직여도 그 픽셀은 밝기를 유지
- 이 조건 때문에 아주 짧은 시간이라면 거의 같은 이미지니까 밝기 차이가 거의 없음이라고 생각할 수도 있음
- motion(u, v)이 작다
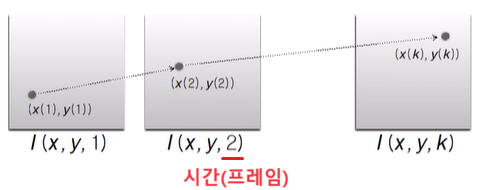
- 시간이 dt만큼 지났을 때, 점
x,y가x+udt, y+vdt로 이동
(u, v: 속도; x, y축으로 얼마나 움직였는지에 대한 정도(Offset, Optical flow))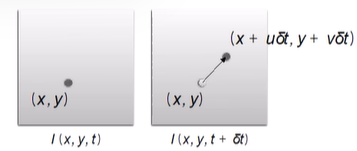
dt가 아주 짧은 시간이면 거의 그대로니까 아래 식 성립
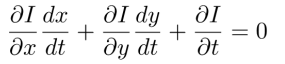
- 테일러 급수를 사용하여 좌변을 정리하면 Brightness Comstancy Equation 식이 나옴
(u, v가 작을 때는 locally linear하므로 미분값이 상수)


- 시간이 dt만큼 지났을 때, 점
Brightness Comstancy Equation
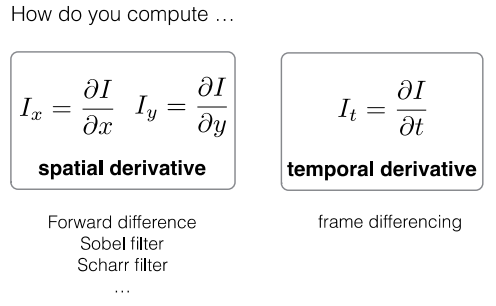
- Spatio Temporal Derivatives (Direct methods)
- Brightness Comstancy Equation으로 u, v를 구하면 이전 프레임의 점
x, y에서 현재 프레임의 점x+u, y+v로 이동했음을 알 수 있게됨
(Image gradient에 얼마나 scale을 해줘야 temporal gradient를 매꿔줄 수 있는가)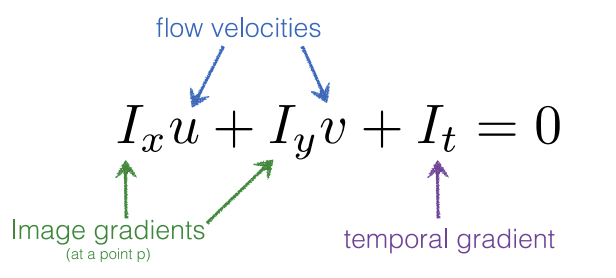
- Brightness Constraint에 따라 밝기는 변하지 않기로 했는데, 시간이 지났는데 변했다 -> 픽셀이 이동했다 -> gradient 방향으로 이미지의 이동 방향을 알 수 있다(u, v)
- 만약 시간이 지나서 내 자리가 밝아졌다면, 밝은 픽셀이 내 자리에 온 것
-> gradient의 방향의 픽셀이 내 자리로 온 것 - gradient방향과 픽셀의 이동방향이 반대이므로 spatial derivative는 음수 (반대방향 내적)
- Brightness Comstancy Equation를 만족하기 위해 temporlal derivative는 양수가 되야함
-> 시간이 지나면서 내 자리 픽셀이 밝아짐을 의미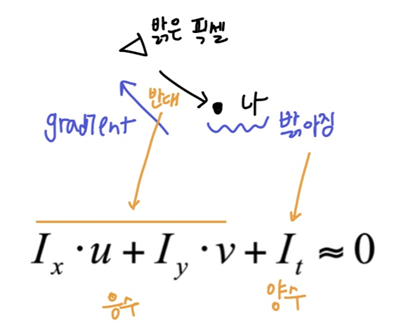
- 만약 이동 방향과 gradient가 수직이라면, 변화X (수직 내적 = 0)
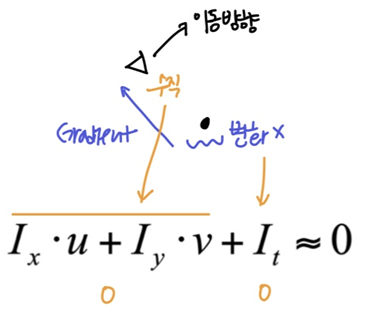
- 만약 시간이 지나서 내 자리가 밝아졌다면, 밝은 픽셀이 내 자리에 온 것
- 공간적인 변화율과 시간적인 변화율이 같아야한다 ✔️
- 필기

✔️ Optical Flow를 찾는 방법은 1. Feature-based method와 2. direct-method 두 개가 존재하며, 필요한 상황에 따라 구분해서 사용 (보통 u,v가 크면 전자로, 작으면 후자로 구한다)
1. Feature-based methods
- 현재 프레임의 feature가 이전 프레임에서 어디였는지 (앞서 배운 feature detection, feature matching 해당 내용)
- Sparse motion field: 몇 개의 feature로 파악하기 때문에 듬성듬성한 데이터가 나오지만, 눈에 띄는 feature 부분은 정교하게 나옴 (robust;튼튼)
- 이미지가 많이/빠르게/큰 움직인 경우(large u, v)에 잘 찾아짐 -> 수십개 pixel의 움직임에서 잘 찾아짐
1-1. Matching Methods
- feature based methods에서 움직임을 계산하는 방법
- Feature point를 찾아 matching한 뒤, 그것을 track (어디서 어디로 갔는지 파악)
- matching의 error minimization
- 이 방법은 아래 Lucas-Kanade와 다르게 움직임이 클 때 사용
- 움직임이 크다고 Aperture 크기를 키우면 Aperture에 배경과 움직이는 물체가 같이 있는 경우가 생겨 판단하기 어려워짐
- 그래서 이런 경우는 feature만 찾아서 그 점들만 tracking하는 것
1-2. Patch matching
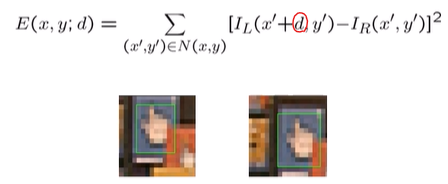
- templete window(초록박스)를 움직이며 block matching(SSD 최소화나 Correlation 극대화 사용)으로 d를 구하면 motion을 추정할 수 있다
- 왼쪽 이미지를 d만큼 이동시켰을 때 밝기 변화가 거의 없다 = 오른쪽 이미지와 같다 = SSD가 최소 = Correlation 최대
2. Direct-methods
- Dense motion field: feature가 아닌, 모든 픽셀에 대해 track
- 이미지가 미세하게 움직인 경우(small u, v)에 잘 찾아짐 -> 10pixel 이내 움직임 ex) CCTV
2-1. Differential Methods
- Direct-methods에서 움직임을 계산하는 방법
- Spatio
위치-Temporal시간Image brightness variations (Spatio-Temporal Derivatives) - 각 픽셀에 대한 시간과 위치에 따른 밝기 변화(=시공간 미분)로 motion 추정
2-2. Lucas-Kanade Method
- spatio-temporal derivatives을 이용한 motion estimation
- brightness consatancy equation을 주변 픽셀까지 계산하여 경향성 파악
Method compute motion example motion motion field how Feature-based Methods Matching methods Patch matching for large sparse(locally) min SSD or max Correlation Direct Methods Differential methods Lucas-Kanade for small dense(globally) Spatio-temporal derivative
◾ Lucas-Kanade Method
- 카메라 이동으로 동일한 피사체의 밝기가 변했다면, 주변 밝기도 동일하게 변할 것
-> 한 점만 볼 것이 아니라 x, y 주변의 점Ω들의 평균적인 움직임을 찾아야 한다 -> 시그마 들어감 - brightness consatancy equation을 한 점에 대해서만 하는게 아니라, image patch에 대해서도 성립하도록 u, v를 풀어 움직임 알아내기
- 가정: 임의의 작은 patch안에서는 모든 pixel이 같은 motion vector를 가진다
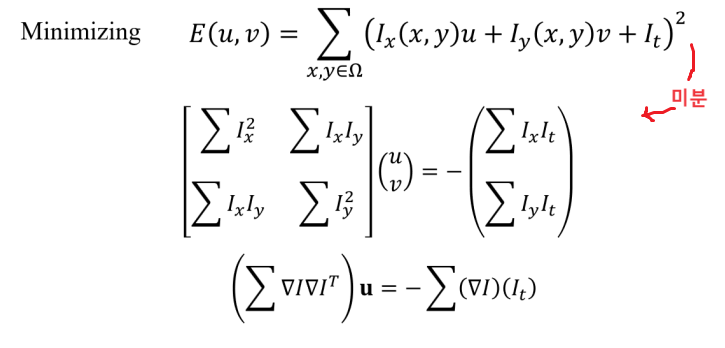
- 위 식의 왼쪽 2x2 행렬의 역행렬로
u, v를 구한다
✔️ Lucas-Kanade Method에는 3가지 문제가 있는데, 이 3가지를 다 보완해주는 방법은 Coarse-to-Fine Estimation이고, [Ⅱ. Large u, v]만을 보완해주는 것은 Iterative Refinement이다. (근데 결국 u, v를 보완해주면서.. 나머지도 해결?)
Ⅰ. Aperture problem
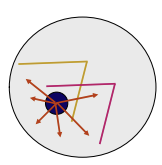
Local Patch Analysis
- feature detection의 Harris Mat과 똑같은 Lucas-Kanade의 Mat -> feature와 관련
- Aperture: 2x2행렬의 sumation 영역 (아래 그림의 검정 원 부분)
- 점이 이동했을 때, 이동 방향을 찾기 위해서는 모든 방향(
Ix,Iy)의 gradient가 0이 아니여야지 찾을 수 있다
- Textured area
- Aperture에 corner: 모든 방향으로 변화가 있어 점 주변의 gradient 분포를 알 수 있고 점이 이동했을 때 어디로 갔는지 분명히 찾을 수 있다
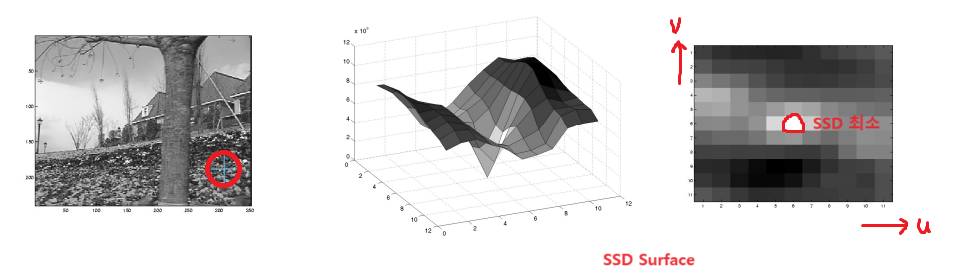
- u, v값에 따른 SSD를 계산했을 때, SSD(E)가 최소(하얀색)가 되는 유일한 점
u, v을 찾을 수 있다 (유일한 해)- Edge
- Aperture에 edge: 한쪽 방향으로 변화x, 한 축의 gradient=0 -> 행렬의 det=0으로 역행렬 존재x
- u, v값에 따른 SSD를 계산했을 때, SSD(E)가 최소가 되는 점
u, v들이 많다 (해가 무수히 많다)- Homogeneous area
- Aperture에 아무것도 없으면 모든 방향으로 변화x, gradient = 0 -> 0행렬
- u, v값에 따른 SSD를 계산했을 때, 의미가 없다 (해가 없다)!
-> patch 내에 gradient가 없어서 밝기 변화가 생겨도 어디서 온 점인지 알 수 없다
- Mu=b를 풀어서 각 픽셀마다
u, v를 계산
- M의 역행렬이 존재하지 않는 경우 (Singular)
- edge 근처의 점들 -> 한쪽 방향으로 변화x
- 전체적으로 feature가 없는 부분 -> 모든 방향으로 변화x
->u, v를 구할 수 없다
- sol: Aperture 크기를 키워서 Aperture안에 코너가 들어올 확률 높여주기
Ⅱ. Large u, v problem
- large motion이면 (u, v)가 크기 때문에 위에서 정했던 brighness constancy를 쓸 수 없다
- (u, v)가 작을 때는 locally linear하므로 미분값이 상수인데, (u, v)가 크면 그렇지 않게 됨
- 이미지가 많이 움직이면 멀리서 픽셀이 오는 것이고, brightness constancy equation을 주변 이웃들과 계산해봤자 의미가 없는 것임..
- sol: Iterative Refinement (아래)
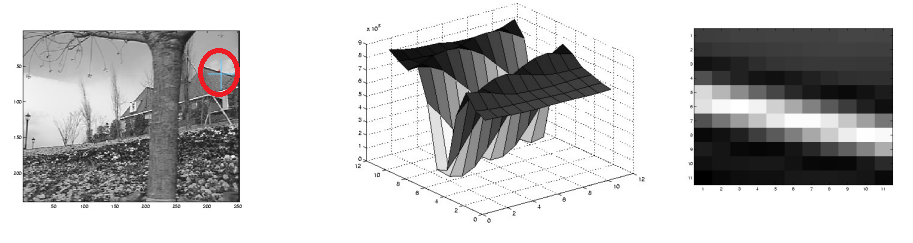
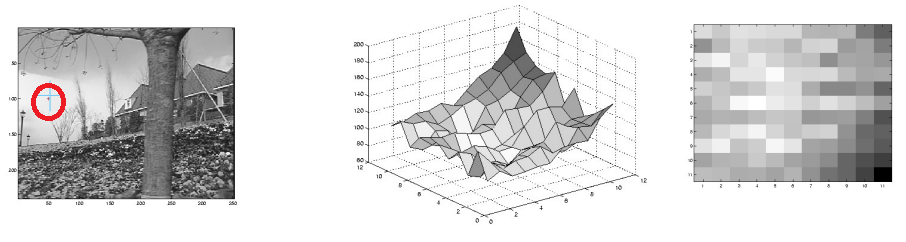
Ⅲ. Aliasing problem
- 정답이 아닌 다른 것을 찾은 경우 (u, v가 커서 생기는 문제)
ex) 시간이 지나서 점이 이동했는데, patch 내에 우연히 똑같은 패턴이 들어와서u, v=0이 아닌데 0으로 나옴 - 반복적인 패턴(울퉁불퉁한 그래프)에서는 제대로된 correspondence를 찾기 어려움 (ex-펜스)
Sol 1. Iterative Refinement
- 큰 u, v로 생기는 문제(Ⅱ, Ⅲ) 해결해줌 (근데 결국 u, v를 보완해주면서.. Ⅰ도 해결?)
- Lucas-kanade estimation으로
u, v계산 - 각 픽셀별로
u, v만큼 움직임 (픽셀마다 다른u, v를 가짐) -> 이미지를 Warping한다 - 반복
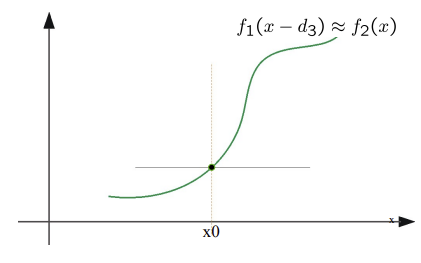
->u, v가 클 때는 iterative하게 풀면 답을 구할 수 있다
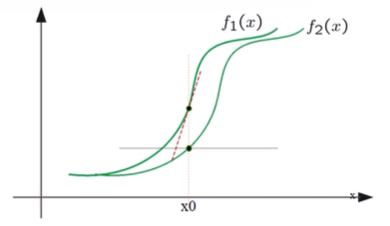
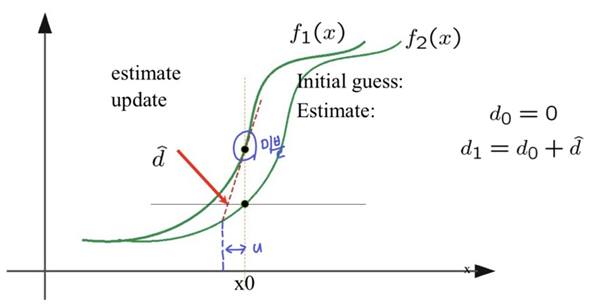
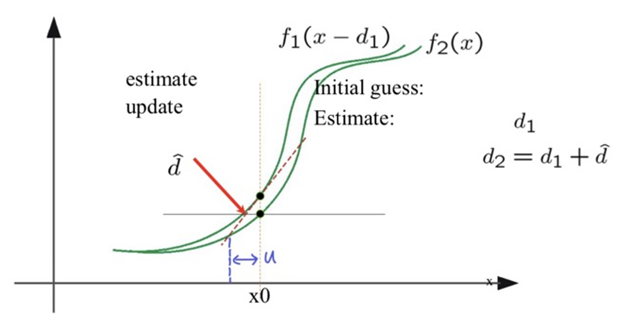
Iterative Estimation
- f1의 점이 어디로 가야 f2에 맞는가
- f1을
x0에서 미분하고, 미분한 것과 f2의 교점의 x좌표와x0좌표의 간격인u를 찾고,u만큼 f1을 이동- f함수가 직선이 아니여서(linearX) 알맞게 찾아지지 않음 (u, v가 매우 작으면 local하게 linear했음) -> 똑같은 과정 반복
Issuses
- 시간에 따라 움직이기 때문에 픽셀별로 다른 속도
u, v를 가지고, 각 픽셀별로 다른 속도로 이미지를 warping하기 어려움
(일관성있게 움직이던 이미지 transform으로 한 forward, inverse warping과 다름)- 각 Iterate마다 모든 픽셀의 gradient를 계산해야함
- low-pass filter를 하면 안정적으로 찾을 수 있음
Sol 2. Coarse-to-Fine Estimation
- ⅠⅡⅢ 세가지 문제를 해결해주는 method
Ⅰ. Aperture
- 특정 점 주변 범위
Ω를 넓혀서 Aperture안에 Corner가 들어오도록 하기 (=이미지 크기 줄이기)- feature detection 할 때처럼, multi scale을 사용해서 이미지를 줄여가며 같은 크기의 Aperture에 corner가 들어가도록 함
- 작은 크기의 이미지 입장에서는 Aperture가 커지는 효과 -> corner가 들어올 확률 커짐
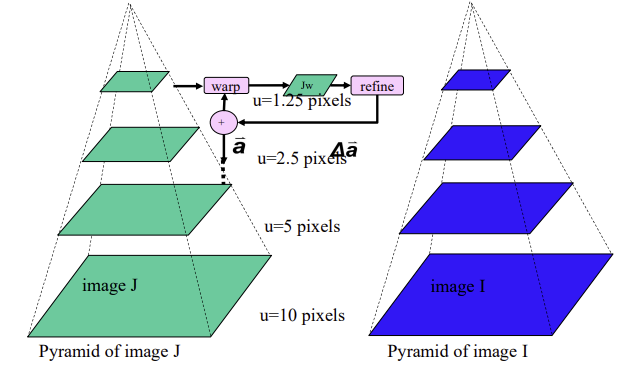
Ⅱ. Large u, v
- Pyramid로 이미지의 크기를 줄이면 u, v도 충분히 작아짐
Ⅲ. Aliasing
- 작은 크기의 이미지 입장에서 커진 Aperture로 반복되는 패턴이 하나의 Aperture에 들어가게 됨
- 전체적으로 관찰해 같은 패턴이 이동한 것임을 알아냄
- Iterative Refinement를 multiscale 기법에 적용한 것 뿐임!!!
- 가장 작은 크기로 줄여둔 이미지에서부터 Lucas-kanade로
u, v를 찾음 u, v(motion field)를 사용해 Optical flow에 맞게 warping -> 이상적으로 그 결과Jw가 다음 프레임 이미지I와 같아야한다 (같다면 다음 단계 이미지 갈 필요 없이 끝)- 같지 않으면 warping한 결과
Jw와I의 차이Δa를 구한다 (이 차이만큼 더 있으면 같아졌을 테니까) -> Refine(다듬다) - 같지 않으면 다음 단계의 이미지로 반복하는데, 이전 단계의
Δa를 더하여 warping한다
- 마지막으로 나온
a_out이 예측된 motion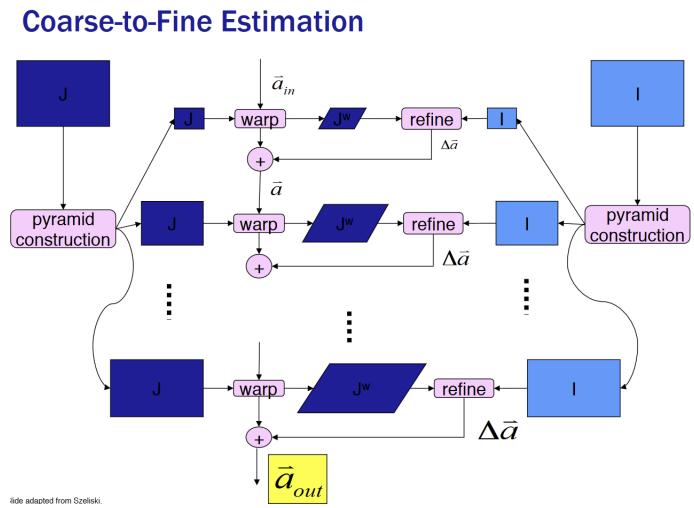
- 가장 작은 크기로 줄여둔 이미지에서부터 Lucas-kanade로
2. Parametric motion estimation
Global(parametric) motion models
- stiching의 나온 motion model은 local하게 본 것이고, optical flow에서는 global하게 어떻게 움직이는지 파악
- 2D Models (2D->2D)
- Affine
- Quadratic (위치에 따라 움직이는 속도 달라짐 표현)
- Planar projective transform(Homography)
- 3D Models
- Instantaneous camera motion models
- Homography+epipole (stereo때 나옴)
- Plane+Parallax (stereo때 나옴)
Motion models to Optical flow (2D models)
- 2D->2D Motion model들을 Optical flow에 적용하여 일반화
- 각 model마다 u, v를 어떻게 계산할까
-
Affine
- Affine transformation으로 구한 새로운 좌표를 u, v로 나타냄
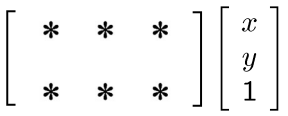
- Brighness constancy equation의 u, v에 위의 x, y에 대한 1차식 대입

- 모든 픽셀에 대해 Least square minimization (= Global optimization)하여 전체 변화
Err가 최소화되는 미지수 6개 구하기
- 두 개의 이미지를 가장 잘 맞추기 위한 Affine transform을 찾는 과정
+) 위의 식에서 a1, a4만 남기면 translation model
- Affine transformation으로 구한 새로운 좌표를 u, v로 나타냄
-
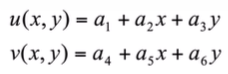
Quadratic(2차식)
- Brighness constancy equation의 u, v에 x, y에 대한 2차식 대입
- 미지수 8개
-
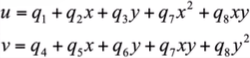
Projective
- Brighness constancy equation의 u, v에 x, y에 대한 식 대입
- 미지수 9개 (하지만 1개의 미지수는 1이 되도록 고정을 하는 등의 조건이 있어야 구할 수 있음, 그렇지 않으면 무수히 많은 해)
Patch matcing
- patch matching으로 large displacement를 찾는다 (이미지의 전반적인 움직임)
- 특정 feature 점들의 block으로 가장 좋은 점을 찾고, 그 점으로 global motion model을 찾음
x,y의 patch와x+u, y+v의 patch를 비교해서 SSD가 가장 작거나 Correlation이 가장 큰x, y점을 찾고, 그 때의u, vmotion vector로 glabal motion model 만듦
- 이제 이미지가 전체적으로 얼마나 움직였는지 파악해서 global motion model로 warping하고 ,
- 그 후에 detail한 것을 찾아 motion field로 warping
(근데 Patch matching은 두 과정에서 다 쓰일 수 있는듯 ?)
matching 방법에는 correlation과 ssd가 있다
◾ Correlation and SSD
SSD의 문제점 - 시험 ⭐
- Correlation: 두 변수간 연관된 상관 관계의 정도 (두 이미지의 sample pixel들의 경향성이 얼마나 비슷한지를 나타냄)
-> 밝기의 경향성이 같은 부분이 있으면 correlation이 높다find max - SSD: sum of squares difference
-> 밝기가 비슷하면 차이가 적다find min - SSD는 전체 밝기가 변하면(contrast
a변화) 값이 달라짐 - 하지만 Correlation은 경향성 파악하기 때문에 contrast
a가 변해도 값이 거의 변하지 않는다 (전체적인 밝기가 달라져도 linear하게 같은 경향성을 가짐)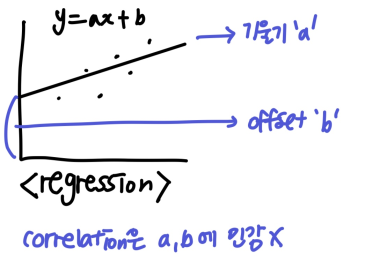
- 그래서 두 이미지가 Photometric하게 차이가있다면 correlation 사용하면 좋다 (a, b에 큰 영향을 받지 않기 때문)
- normalized correlation
- correlation은 밝은 곳에서 너무 큰 값이 나오고, 어두운 곳에서는 작은 값이 나온다.
- 밝기값에 영향을 받지 않도록 (어두운 곳에서도 비슷한 경향성이 있으면 큰 값이 나왔으면 좋겠다), 정규화를 한 correlation을 사용하기도 한다
- normalized correlation
correlation search window size
- window size 작으면
- more false matches (motion vector가 window size보다 크면 어려움)
- more detailed, less smooth
- high flow resolution
- window size 크면
- window 내 픽셀들이 따로 움직이면 motion model이 잘못나올 수 있음
-> neighboring flow vectors tend to be more correlated (window 안에는 비슷하게 움직이는 애들만 있음 좋을텐데.. 어려움) - 따로 움직이는 방향의 SSD를 최소화하다보니 그 중간을 찾게되고, motion vector가 블러되는 느낌 (lower flow resolution)
- high computing cost
- window 내 픽셀들이 따로 움직이면 motion model이 잘못나올 수 있음
- 부드럽고 전반적인 움직임은 window 크기를 키워서, 디테일하고 로컬한 움직임은 window 크기를 줄여서 구한다
◾ Discrete search method vs Gradient Based method
- matching 과정으로 찾은 motion vector가 정수?실수?
- Patch matching -> Discrete search method
- 비슷한 patch를 찾기 위해 pixel to pixel로 u, v를 찾으므로 motion vector가 정수 (실수값의 u, v를 구하지 못한다)
- Lucas-Kanade -> Gradient based method
- 2x2 Hessian 행렬을 찾아 u, v를 찾으므로 소수점 단위의 픽셀(sub-pixel) 이동 계산 가능
(intensity function의 derivative가 linear하다 생각하고 품) - ex) 10만큼 밝아진게 1픽셀 움직인 것 -> 5만큼 밝아지면 0.5픽셀 움직인 것이구 나
- 2x2 Hessian 행렬을 찾아 u, v를 찾으므로 소수점 단위의 픽셀(sub-pixel) 이동 계산 가능
◾ Shi-Tomasi feature tracker
- 내용 종합
- 2x2 Hessian의 min eigenvalue를 찾아 좋은 features 찾기
- Lucas-Kanade로 전체적인 translation 계산
- Affine motion을 찾아내서 .. 머 반복?
- 영상 tracking 결과

- 찾은 u, v로 translation만 계산

- 여러 점으로 motion model을 찾아 affine transform -> 더 깔끔하게 찾아짐

- 찾은 u, v로 translation만 계산
Robust Estimation
- Least square(평균)로 구하는 Match를 방해하는 Outliers
- noise
- highlignts
- jpeg artifacts
- interlacing (홀/짝 따로그림)
- motion blur
- multiple motions (반투명한 물체와 그것에 가려진 물체가 따로 움직이거나 가려지는 경우)
- sol: Robust Estimation (outlier에 덜 민감한 평균 찾기 방법)
- outlier가 될만한 요소들을 제거하고 계산
- 기존의 error^2을 최소화하던 방법
-> 미분하면 error의 영향을 직접적으로 받음을 알 수 있음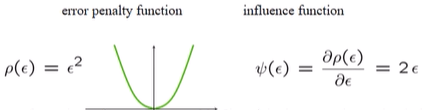
- 그래프에서 위쪽에 많이 분포할 outlier를 무시하기 위해
s(어디까지 inlier로 볼 것인가)가 추가된 식을 최소화
-> 미분하면 error가 커져도 분자에 의해 영향을 작게 만들 수 있음을 확인할 수 있다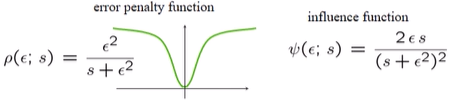

( •̀ .̫ •́ )✧