앞서 PLL을 설명할 때는 상수 phase offset을 설정하고 PLL이 상수 phase로 수렴하는 것을 확인했다.
그러나 실제 carrier phase offset의 경우 매 심볼 주기 마다 다른 phase soffset이 존재한다.
따라서 수신부에서 매치드 필터링된 이후 심볼 주기에서 샘플을 뽑았을 때 phase offset는 계속해서 달라진다. 이를 아래 식으로 나타낸다.
∠z(mTM)=∠a[m]+θ△
따라서 carrier phase 동기화 부분은 매 심볼 간격으로 변화하는 phase인 θ△을 추적해야 한다.
회전변환 공식에 따르면 시계방향 회전은 Icosθ+Qsinθ 와 Qcosθ−Isinθ 를 각가 I와 Q에 곱해주면 된다.
따라서 매 심볼 간격으로 추정된 phase offset만큼 회전변환 시켜주면서 carrier phase synchornization을 수행하게 된다 식은 아래와 같다.
zI(mTM)sync=zI(mTM)cosθ△^+ZQ(mTM)sinθ△^
zQ(mTM)sync=zQ(mTM)cosθ△^−ZI(mTM)sinθ△^
이제 앞선 feedforward carrier phase synchronization에서 phase offset을 유도했던 식을 살펴보면 아래와 같다.
θ△^=∠m=0∑NP−1a∗[m]z(mTM)
이제 이전 PLL의 phase error detector의 함수를 위 식으로 바꿔주기만 하면 feedback 기반 carrier phase synchronization이 완성된다.
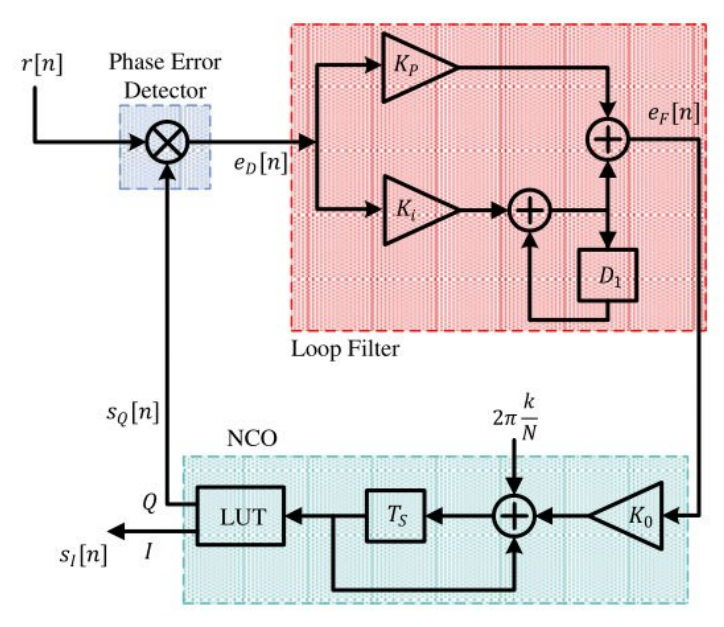
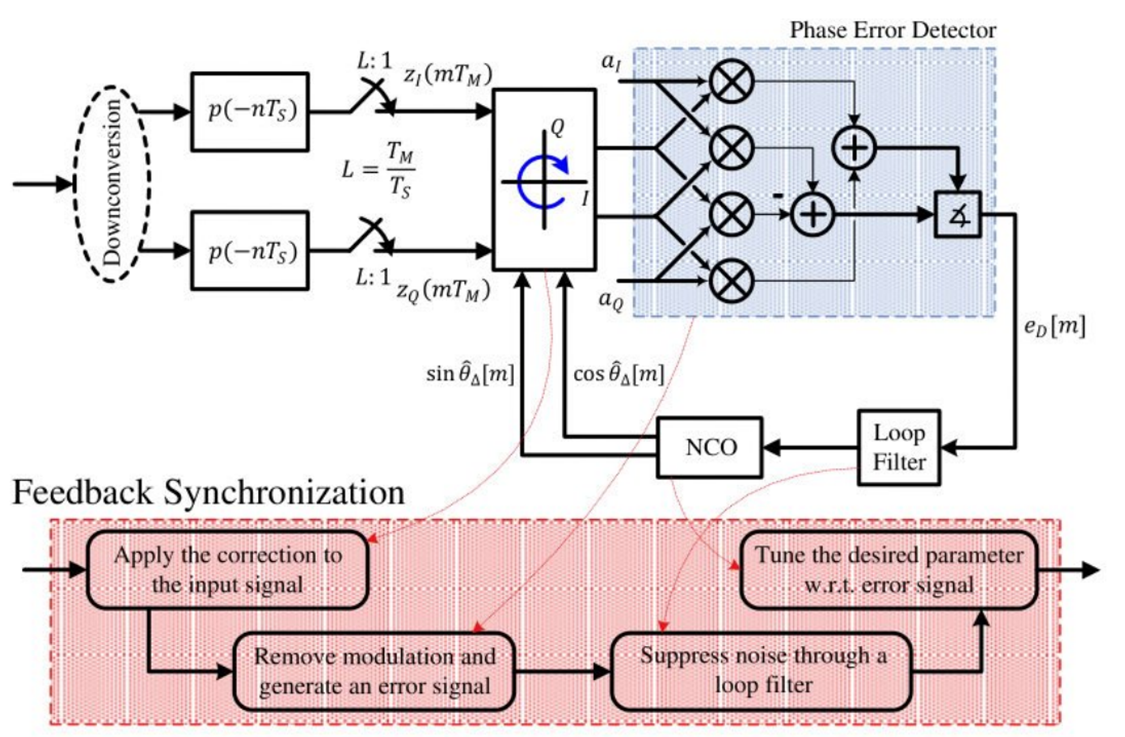
따라서 위 그림에서 Phase Error Detector의 출력인 eD[n]은 아래 식과 같다.
eD[m]=∠[amz(mTM)sync]
따라서 위 식을 풀면
[a∗[m]z(mTM)sync]I=aI[m]zI(mTM)+aQ[m]zQ(mTM)
[a∗[m]z(mTM)sync]Q=aI[m]zQ(mTM)−aQ[m]zI(mTM)
따라서 phase error detector의 출력은 아래와 같다.
eD[m]=tan−1[a∗[m]z(mTM)sync]I[a∗[m]z(mTM)sync]Q=tan−1aI[m]zI(mTM)sync+aQ[m]zQ(mTM)syncaI[m]zQ(mTM)sync−aQ[m]zI(mTM)sync
이제 feedback 기반 carrier phase synchornization의 구조를 아래 그림에 나타낼 수 있다.
feedforward 기반 carrier phase synchronization은 carrier phase offset을 찾아 한 번에 보상하는 방식으로 이루어졌다.
반면 feedback 기반 carrier phase synchronization은 carrier phase offset을 찾은뒤 loop filter를 통해 점진적으로 수렴하는 방식이다.
loop filter는 대역 외에 존재하는 노이즈와 신호 외 다른 주파수 성분을 억제한다.
NCO 또는 DDS라고 불리는 하드웨어는 다음 심볼 주기에 추정된 심볼 위상만큼 회전 시키는 정현파를 생성한다.
즉 PLL과 차이점은 phase error detector 가 다르고 또 매 심볼 주기마다 위상을 보정해준다는 차이가 존재한다.
이제 feedback 기반 carrier phase synchronizer의 phase error detector를 분석해보자.
PLL과 비슷하게 S-curve 또는 mean curve라고 불리는 것을 활용할 수 있다.
실제 phase offset인 θ△ 이랑 추정 phase offset인 θ△^의 오차를 θ△:e라고 하자.
θ△:e=θ△−θ△^
이 때 feedback 기반 carrier phase synchronizer의 phase error detector의 평균 출력 eDˉ는 아래와 같다.
eDˉ=θ△:e
따라서 phase error detector의 gain은 kD=1 이다.
이제 phase error detector의 s-curve를 보면 아래와 같다.
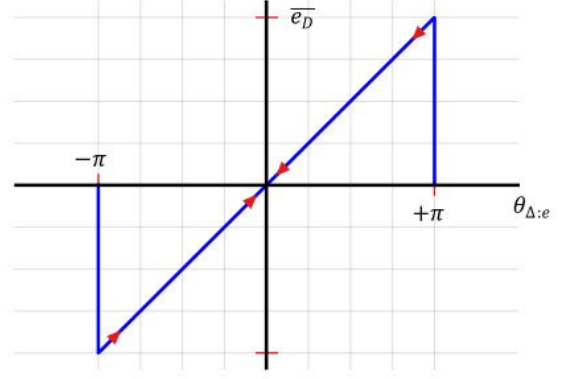
S-curve는 −π<=θ△:e<=π 에서 선형 특성을 갖는다. 그리고 양수 기울기가 θ△:e=0 근처에서만 나타난다. 따라서 최종 lock 된 추정 phase의 모호성이 없다.
참고하자면 S-curve가 양수일 때 phase가 lock 특성을 보인다.
