[ROS 2로 시작하는 로봇 프로그래밍]에 기반한 정리글입니다.
1. ROS 2와 DDS
ROS에서 사용되는 메시지 통신은 토픽, 서비스, 액션, 파라미터가 있다. 각 메세지 통신의 목적과 사용 방법이 다르지만, 토픽의 Publish와 Subscribe의 개념을 응용한다. ROS 2는 산업용 시장 진입을 위한 표준 방식 사용을 중요하게 생각하였기에 DDS(Data Distrubution Service)의 RTPS(Real Time Publish Subscribe)을 사용한다.
1.1 DDS란?
DDS는 데이터 분산 시스템의 줄임말로, ROS 2에서는 데이터 통신을 위한 미들웨어이다. 이 미들웨어는 ISO 7계층 레이어에서 호스트 계층에 해당하는 4~ 7계층에 해당하는데, ROS 2에서는 운영체제와 사용자 애플리케이션 사이의 소프트웨어 계층에서 이를 통해 통신하면서 데이터를 공유할 수 있게 한다.
DDS의 도입으로 메시지 정의 및 직렬화를 쉽고 포괄적으로 다룰 수 있게 되었으며, ROS 2는 통신 프로토콜 DDSI-RTPS을 채용하여 실시간 데이터 전송을 보장하고 임베디드 시스템에도 사용할 수 있고, 여러 DDS 프로그램 간에 통신할 수 있게 되었다.
또한 노드 간의 데이터 통신을 세부적으로 조정하는 QoS(Quality of Service)를 설정할 수 있어 TCP처럼 데이터 손실을 방지하여 신뢰도를 높일수도, UDP처럼 통신 속도를 우선하여 사용할 수 있다.
ROS 2는 UDP 기반의 Reliable multicast가 구현되었는데, 멀티캐스트 도입으로 DDS Global Space에 등록된 토픽들에 대해 Publish, Subscribe를 할 수 있게 되었다. 및 UDP의 신뢰성 문제 또한 QoS를 통하여 보완, 해결되었다.
DDS는 동적 검색(Dynamic Discovery) 또한 제공하며, 이 덕분에 응용 프로그램은 어떤 토픽이 지정 도메인 영역에 있고, 어떤 노드가 이를 발신하고 수신하는지 알 수 있어 데이터를 주고받을 노드들의 IP 주소와 포트를 따로 구성할 필요가 없다.
1.2 ROS에서의 사용법
아래 그림은 Subscribe 역할의 listener과, Publish 역할을 하는 talker 노드를 각각 실행한 것이다. 이 두 노드가 실행되었다는 것은 이미 지정된 DDS, 즉 RMW(ROS Middleware)를 사용하고 있는 것이다.
$ ros2 run demo_nodes_cpp listener
$ ros2 run demo_nodes_cpp talker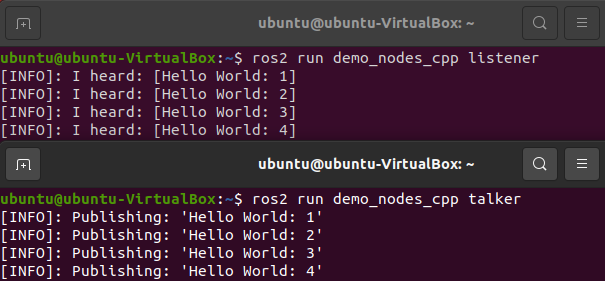
$ rqt_graph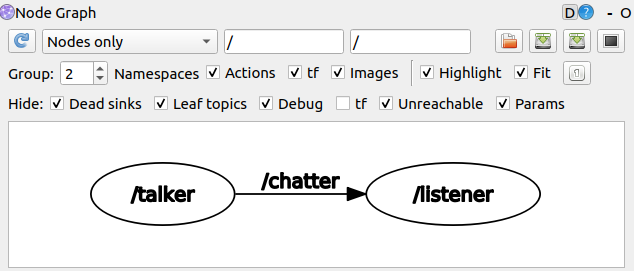
RMW 변경 방법
위에서는 RMW에 대해 아무 설정도 하지 않았기에 기본 RMW인 rmw_fastrtps_cpp가 사용되었다.
만약 RMW를 변경하려면 ROS 2를 지원하는 RMW 중 하나를 RMW_IMPLEMENTATION으로 변경한다.
- rmw_connext_cpp
- rmw_cyclonedds_cpp
- rmw_fastrtps_cpp
- rmw_gurumdds_cpp
아래 사진에서는 두 노드에 서로 다른 RMW를 사용해도 문제없이 통신이 가능함을 보여준다.
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
$ ros2 run demo_nodes_cpp listener
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
$ ros2 run demo_nodes_cpp talker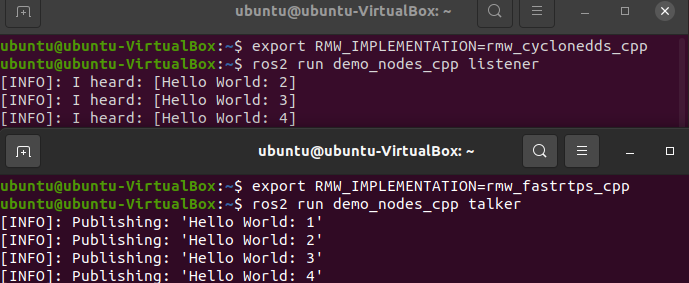
Domain 변경 방법
한편, ROS 2에서는 UDP 멀티캐스트로 통신이 이루어지기 때문에, 별도의 설정을 하지 않는다면 동일 네트워크의 모든 노드가 연결되게 된다. DDS의 Domain을 변경하여 이를 방지할 수 있다.
ROS의 RMW에서는 ROS_DOMAIN_ID라는 환경변수로 Domain을 변경할 수 있다.
노드간의 DOMAIN_ID가 같다면 통신 가능, 다르다면 불가능함을 보여준다.
$ export ROS_DOMAIN_ID=11
$ ros2 run demo_nodes_cpp listener
$ export ROS_DOMAIN_ID=12
$ ros2 run demo_nodes_cpp talker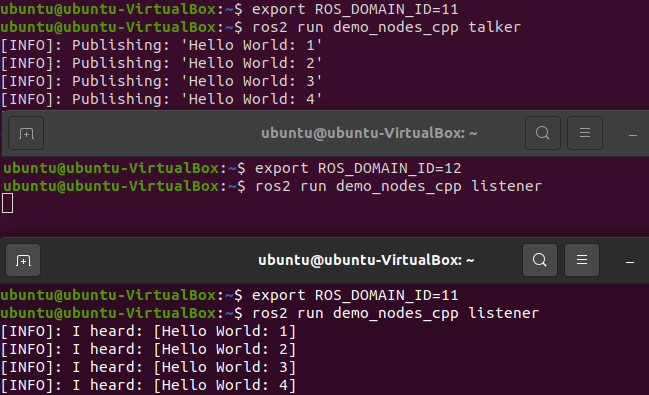
QoS 테스트
DDS의 QoS의 설정도 가능하다. Reliability 설정을 통하여 데이터 통신 옵션을 선택할 수 있다.
demo_nodes_cpp 패키지는 기본적으로 Realibility 설정이 RELIABLE로 되어있는데, 이는 TCP와 같이 ACK을 매번 확인하여 손실된 데이터가 있다면 재전송받게 되어 잃어버리는 데이터가 없다.
만약 해당 패키지의 Realibility 설정이 BEST_EFFORT로 되어있는 노드를 사용하고 싶다면 아래와 같은 명령어를 사용한다. 이는 손실되는 데이터가 있을 수 있지만, 손실된 데이터의 재전송으로 인한 끊김도 나타나지 않는다.
$ ros2 run demo_nodes_cpp listener_best_effort2. DDS의 QoS(Quality of Service)
QoS란 쉽게 말해 데이터 통신 옵션으로, ROS 2에서는 TCP와 UDP 통신 방식을 선택적으로 사용할 수 있다.이를 위해 DDS의 QoS를 도입하였고, 이 덕분에 데이터 전송의 실시간성, 대역폭, 지속성, 중복성과 관련된 옵션 등을 QoS를 통해 바꿀 수 있다.
2.1 ROS 2에서 사용되는 QoS 옵션
ROS 2에서는 DDS에서 제공하는 22개의 QoS 중에서 History, Reliability, Durability, Deadline, Lifespan, Liveliness를 지원한다. ROS 2에서는 이 중 대표적으로 Reliability가 사용된다.
History:데이터를 몇 개나 보관할지 결정하는 옵션Reliability: 데이터 전송에서 속도를 우선하는지 신뢰성을 우선하는지를 결정하는 옵션Durability: 데이터를 수신하는 Subscribe가 생성되기 전의 데이터를 사용할 것인지에 대한 옵션Deadline: 정해진 주기 안에 데이터가 발신, 수신되지 않을 경우 이벤트 함수를 실행하는 옵션Lifespan: 정해진 주기 안에서 수신되는 데이터만 유효 판정하고, 그렇지 않은 데이터는 삭제하는 옵션Liveliness: 정해진 주기 안에서 노드 혹은 토픽의 생사를 확인하는 옵션
2.2 RMW QoS Profile 사용
ROS 2의 RMW에서 QoS 설정을 쉽게 사용할 수 있도록 많이 사용하는 QoS 설정을 세트로 표현해둔 것을 RMW QoS Profile라고 한다.
목적에 따라 Default, Sensor Data, Service, Action Status, Parameters, Parameter Events의 6가지로 구분되며, Relibility, History, Depth, Durability를 설정한다.
https://github.com/ros2/rmw/blob/foxy/rmw/include/rmw/qos_profiles.h
https://github.com/ros2/rcl/blob/master/rcl_action/include/rcl_action/default_qos.h이를 실제 코드에서 사용하려면 파이썬 기준으로 다음과 같이 임포트한다.
from rclpy.qos import qos_profile_sensor_data
self.sensor_publisher = self.create_publisher(Int8MultiArray, 'sensor', qos_profile_sensor_data)사용자가 직접 설정하여 새로운 프로파일을 만들 수도 있다.
from rclpy.qos import QoSDurabilityPolicy
from rclpy.qos import QoSHistoryPolicy
from rclpy.qos import QiSOrifuke
from rclpy.qos import QoSReliabilityPolicy
QOS_RKL10V = QoSProfile(
reliability=QoSReliabilityPolicy.RELIABLE,
history=QoSHistoryPolicy.KEEP_LAST,
depth=10,
durability=QoSDurabilityPolicy.VOLATILE)
self.sensor_publisher = self.create_publisher(Int8MultiArray, 'sensor', QOS_RKL10V)3. 마무리
이번 포스팅에서는 ROS 2의 데이터 통신을 위한 미들웨어 DDS와, 데이터 통신 옵션인 QoS에 관하여 다뤘다. ROS 2가 채택한 노드간 통신 기법과 옵션들을 자세히 알 수 있었고 RMW 변경 방법과 QoS 프로파일 변경 방법 또한 알 수 있었다.
다음 포스팅에는 ROS 패키지 중 하나인 Turtlesim을 설치하고 노드를 실행해본다.
멋져요~