Review
Cramer-Rao Lower Bound(CRLB)
- The
CRLBgive a lower bound on the variance of anyunbiased estimatorDoes not guarantee bound can be obtained
- If find an unbiased estimator whose variance =
CRLBthen it'sMVUE - Otherwise can use
Ch.5tools(Rao-Blackwell-Lehmann-Scheffe Theorem and Neyman-Fisher Factorization Theorem) to construct a better estimator from any unbiased one - possibly theMVUEif conditions are met
CRLB -Scalar parameter
- Let satisfy the
regularitycondition, - Then, the
varianceof anyunbiased estimatormust satisfy - Where the derivative is evaluated at the true value of and the expectation is taken w.r.t. $p(x;\theta).
Furthermore, an
unbiased estimatormay be found that attains the bound for all iffFor some functions and . That
estimator, is theMVUEwithvarianceis
General CRLB for Signals in WGN
Vector Form of the CRLB
- Assuming satisfies the
regularitycondition - The
covariance matrixof anyunbiased estimatorsatisfies - Where means the matrix is
positive semidefiniteFurthermore, an
unbiased estimatormay be found that attains the bound
if and only if - In that case, is the
MVU estimatorwithvariance.
Linear Model 으악
- The determination of the
MVUEis difficult in general. Many estimation problems can be represented by thelinear modelfor which theMVUEis easily determined - Line fitting example
- In Matrix notation,
- In Matrix notation,
MVUE for the Linear Model
- Determine the
MVUEfrom the equality condition ofCRLBtheorem - will be the
MVUEif - For the
linear model, - Assume that is
invertible - For
linear model, anefficient MVUEcan be found if isinvertible. isinvertibleiff(if and only iff) the columns of are linearlyindependent.(seeProb. 4.2) - If the columns of are not
linearly independent, even in the absence of noise, the model parameters will not beidentificable(The number of equations is less than the number of variables.)
MVUE for the Linear Model - Theorem
- If the observed data can be modeled as , then the
MVUEis - And the
covariance matrixof is - Where is an vector of observations, is
knownobservation matrix(with ) with rank - is a vector of parameters to be estimated, and is an noise vector with PDF
- For the
linear modeltheMVUEisefficientin that it attains theCRLB. - Also, the statistical performance of is completely specified, because is a
linear transformationof a Gaussian vecot and hence
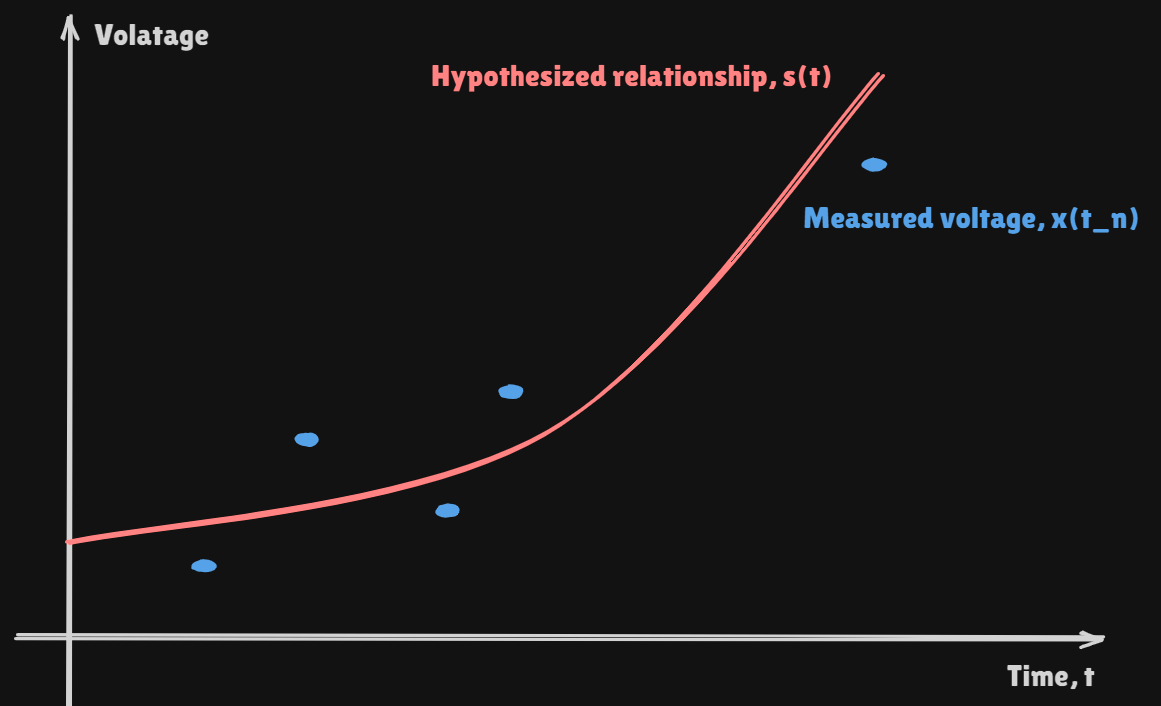
Example - Curve Fitting
The
LinearinLinear Modeldoes not come from fitting straight lines to data. It is more general than that!!
Example - Fourier Analysis
- Data model
- Parameters(Fourier coefficients)
- Observation matrix
- Apply
MVUETheorem forLinear Model,
Example - System Identification
-
Goal : Determine a model for the system
- Wireless Communications(idenfy & equalize multi-path)
- Geophysical Sensing(oil exploration)
- Speakerphone(echo cancellation)
-
In many applications : assume that the system is
FIR(FiniteImpulseResponse)(length p)(or TDL) -
where :
Pilot Signalisknown, for , :WGNIt's
Linearthan, We can applyMVUE -
MVU estimatorof the impulse responseWhat signal is best to use?
-
The that gives the
smallest estimated variances!! -
Choosing s.t. is
diagonalwill minimize variance -
Choose to be
pseudo-random noise(PRN)PRNhas approximatelyflat spectrum(From a frequency-domain view aPRNsignal equally probes at all frequencies)
-
Designing the
probing signal -
Equality holds when or
-
The conditions achieving the
minimum possible variancesare -
To minimize the variance of
MVUE, should be chosen to makediagonalFor large , we have
-
Under these conditions,
-
Then,
MVU estimatorwith yieldswiener filter : has been cross corelations and autocorelations function so far about WGN
Linear Model with Colored Noise
- General
Linear Modelwithcolored noiseWhitening approach
