rotation은 원래의 평면을 만큼 회전시키는 것을 origin은 고정된 점이다. 일반적으로 회전은 반시계 방향을 기준으로 한다.
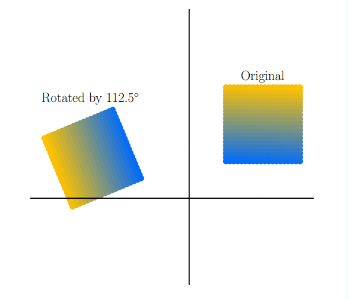
위 그림은 반시계방향으로 회전시키는 것으로 이때 transformation matrix는 다음과 같다.
Rotations in
에서의 standard basis가 다음과 같을 때, 이 basis는 에서의 표준 좌표계를 정의한다.
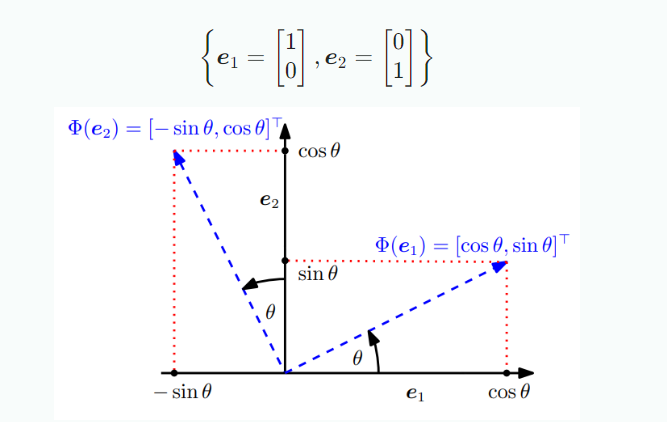
위 그림처럼 만큼 좌표계를 회전시킬 때 회전된 벡터는 여전히 선형 독립적이기 때문에 여전히 의 기저이다.
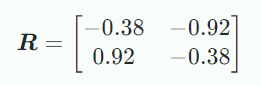
Rotation 는 linear mapping이므로 rotation matrix 로 표현할 수 있다. 위 그림의 rotation matrix 는 다음과 같다.

Rotations in
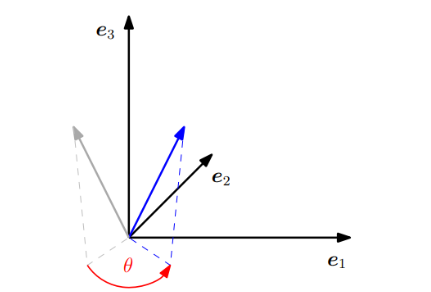
에서의 회전은 2차원 평면을 고정된 1차원 축에 대해서 회전시킨다. standard basis 가 회전된 는 서로 직교한다. 따라서 General rotation matrix 은 standard basis로부터 변환된 basis의 조합으로 얻을 수 있다. 2차원 이상의 차원에서 회전은 반시계방향이 어떤 방향인지 정의해야 하는데 이때, 아래 그림과 같이 한 basis vector를 중심 축으로 반시계 방향으로 회전시키면 된다.
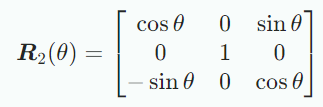
각각 3개의 기저벡터를 축으로 회전한 rotation matrix는 다음과 같다.
에대한 회전은 좌표는 고정되며 반시계 회전은 평면에서 수행된다.

와 에대한 회전도 위와 같은 식으로 수행하면 된다.
Rotations in
n차원에서의 회전은 n-2차원을 고정하고 n차원 상에서 2차원 평면이 회전하는 것으로 제한할 수 있다. 를 n-차원의 Euclidean vector space라고 하고 가 아래의 transformation matrix를 갖는다고 할 때, 를 Givens Rotation이라 한다.
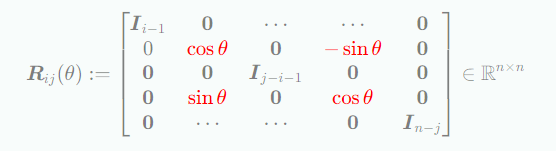
는 아래와 같은 element를 갖는 항등행렬 이다. 
Properties of Rotations
Rotation은 orthogonal matrix로부터 유도되는 몇 가지 유용한 성질들이 있다.
- rotation은 거리를 보존한다. 즉, 이다.
- rotation은 각도를 보존한다. 따라서 Rθ(x)와 Rθ(y)간의 각도는 x와 y간의 각도와 같다.
- 3차원 이상의 차원에서는 교환법칙이 성립되지 않으므로 회전이 적용되는 순서가 중요하다.
