EECS 498-007 / 598-005 Deep Learning for Computer Vision (Lecture 6 : Backpropagation)
EECS 498-007 / 598-005
Backpropagation
- 이전까지 Linear classifier보다 더 강력한 Neural Network를 배움.
- Neural Network는 Linear classifier보다 강력한 성능을 가지고 있지만,
- Optimize 과정에서 Non-convex 문제 발생
Problem : How to compute gradients?
- 그렇다면 Neural Network의 gradient는 어떻게 계산?
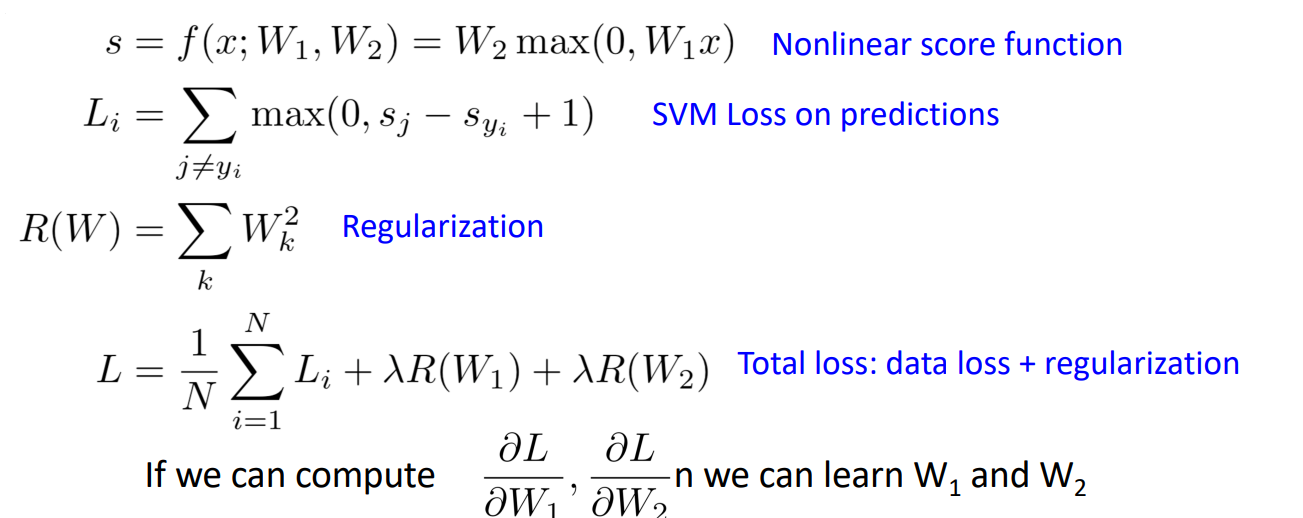
Idea : Derive △ on paper
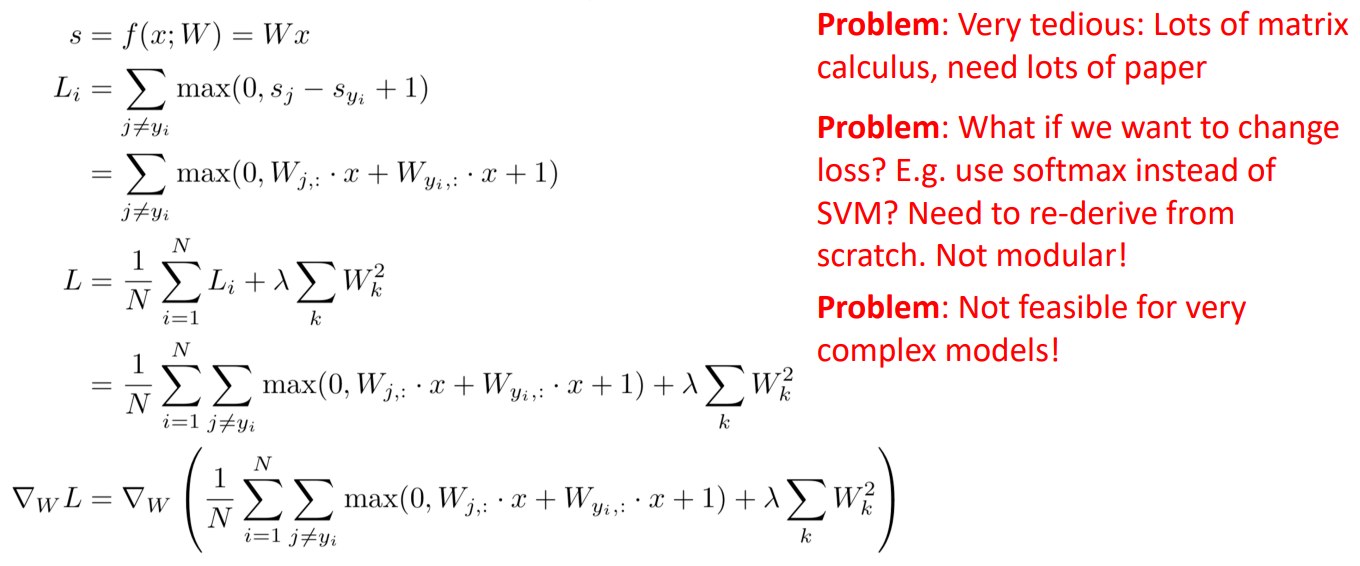
- 통째로 미분을 하면 중간에 값을 바꾸기도 어렵고, 많은 연산량을 필요로 하므로 bad
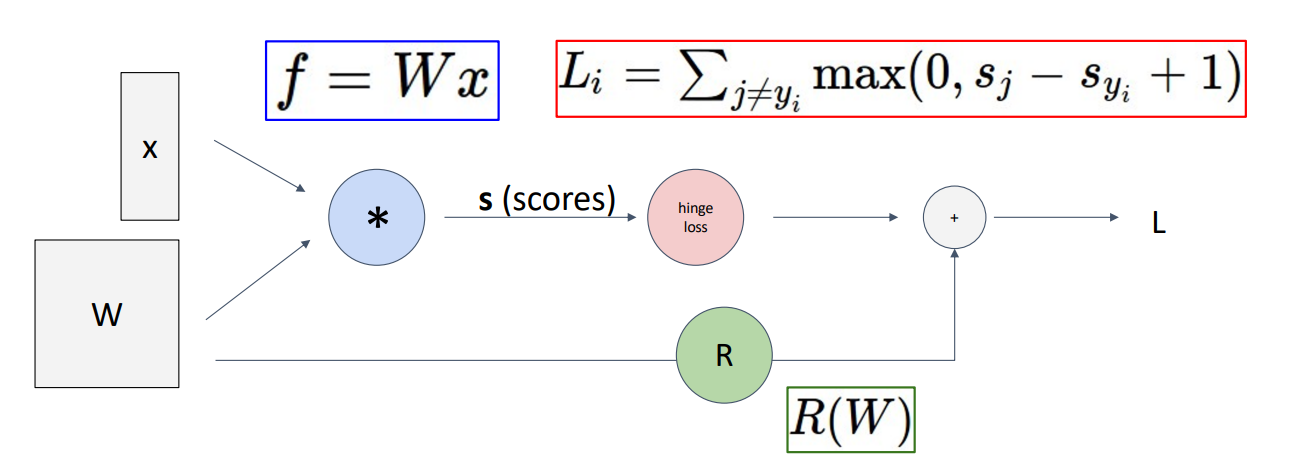
Idea : Computational Graphs
-
Computational Graph는 우리의 모델이 어떻게 작동하는지를 그래프로 나타낸 것.
-
왼쪽에는 모델의 input으로 X와 학습할 수 있는 W가 node에 들어가고
-
파란색 노드에서 X와 W의 곱이 계산.
-
빨간색 노드에서는 hinge loss(SVM loss)가 계산되고
-
초록색 노드에서는 regularization을 맡아 이를 더해주어 OUTPUT L을 얻음
-
이러한 Computational Graphs는 Linear model에서는 매우 사소하고 과해보이지만
-
훨씬 더 크고 복잡한 모델에서는 효과적
-
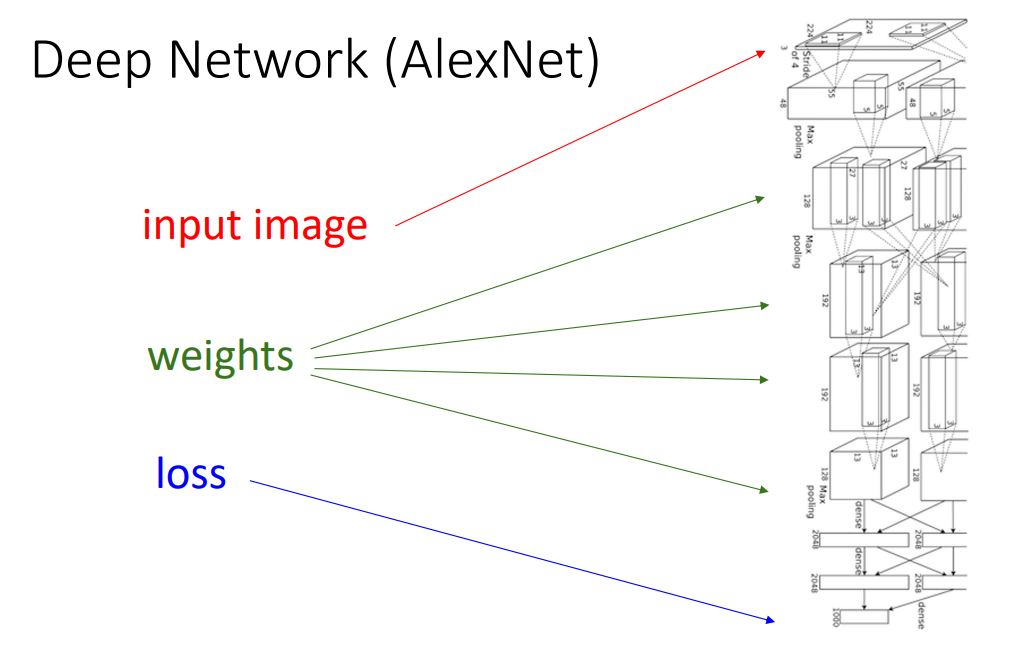
예를 들어서 AlexNet같은 경우에는 convolutional layer가 7개 있고, 비선형성을 가지며 모든 layer마다 regularizer와 loss function이 있음.
-
이러한 모델은 이론적으로 계산하고 싶이 않을 것이며 Computational Graph의 필요성이 커짐.
-
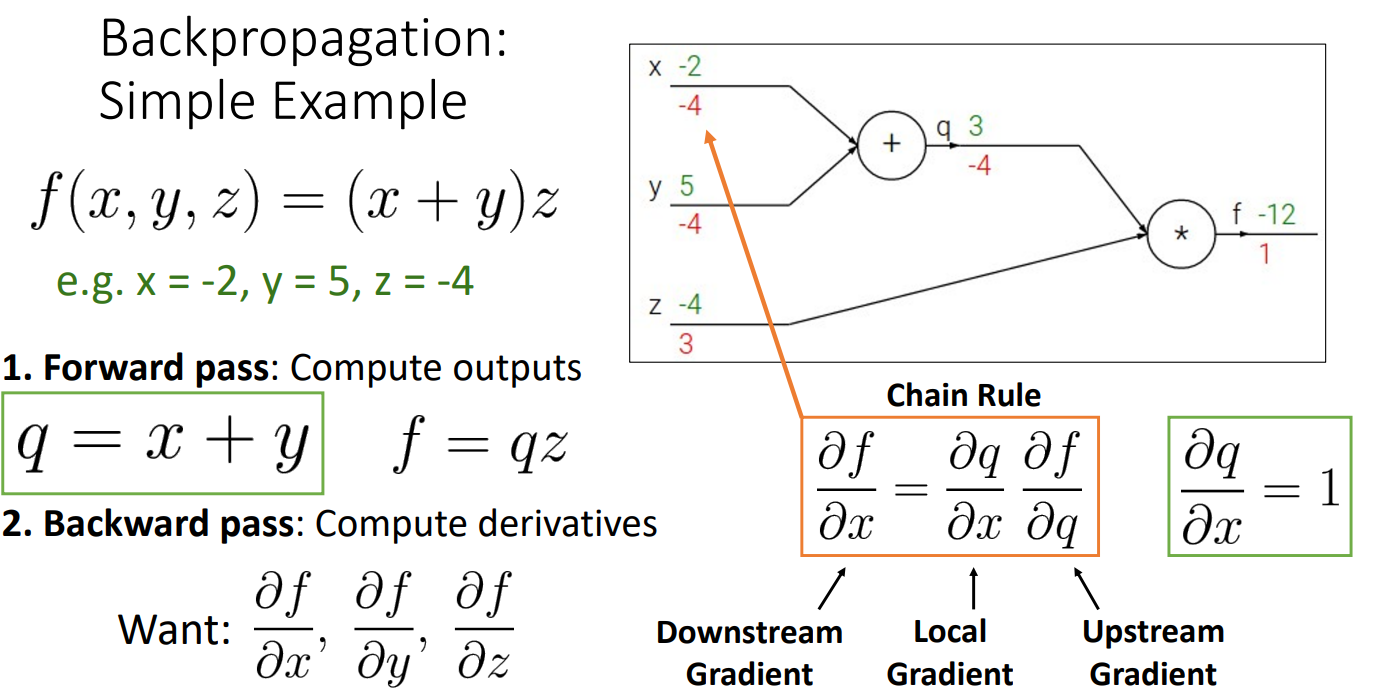
위와 같은 x=-2, y=5, z=-4로 이루어진 간단한 함수의 작동을 예로 들면
-
gradient를 계산하기 위해서 backpropagation이 사용됨.
-
먼저 Forward pass를 통해서 computational Graph의 Output을 계산.
-
Backpropagation을 통해서 우리가 얻고싶은 것은 , ,
-
=
-
를 구할때 이므로 = =
-
와 를 구하기 위해서는 식을 이용하여 = =
-
이때 Chain Rule을 이용하여 = = =
-
= = =
-
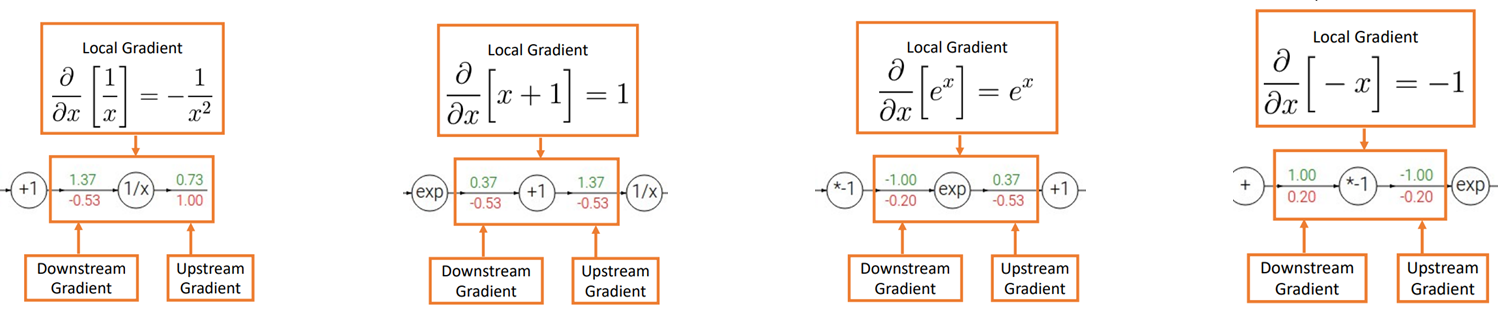
여기서 를 Downstream Gradient라고 하고
-
여기서 를 local Gradient라고 하고
-
여기서 를 Upstream Gradient라고 할때
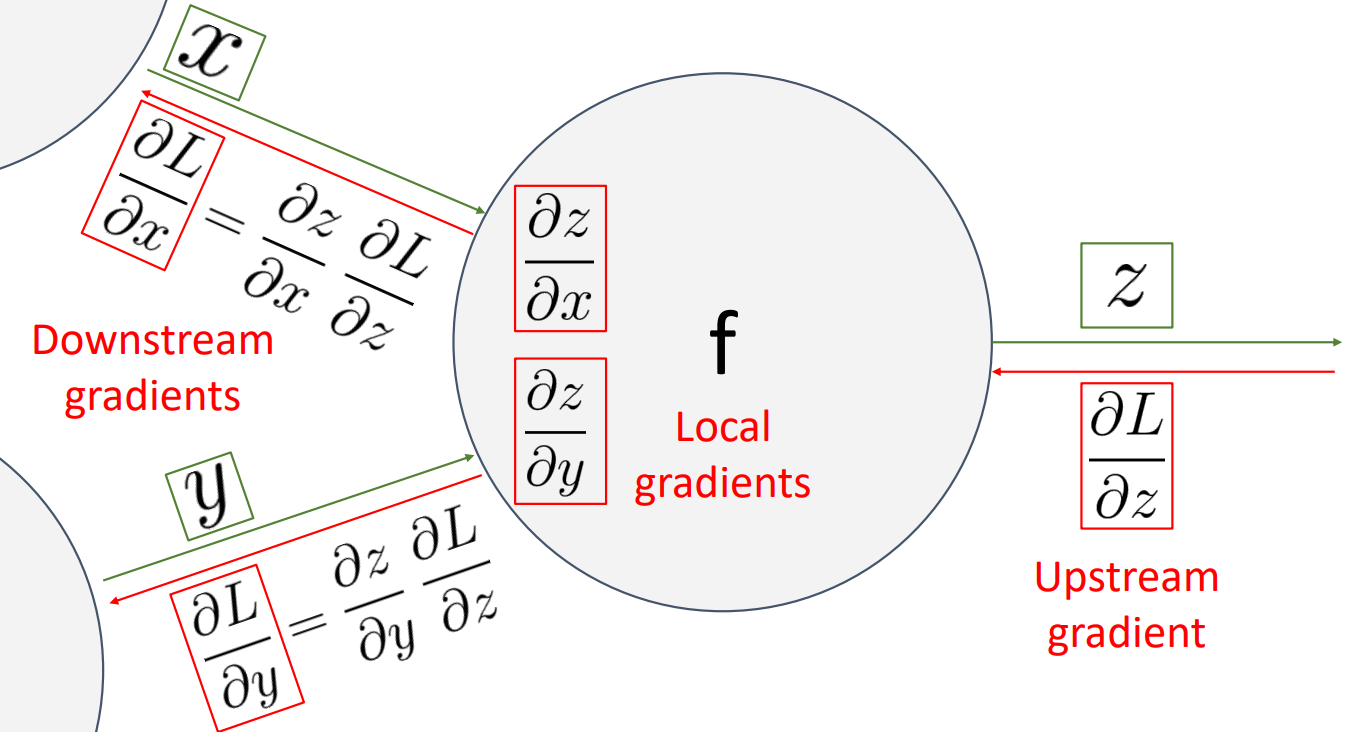
- 각 노드에서 Upstream Gradient와 Local Gradient의 곱을 통해서 Downstream을 구할 수 있음.
- 위의 그림을 예시로 들었을 때
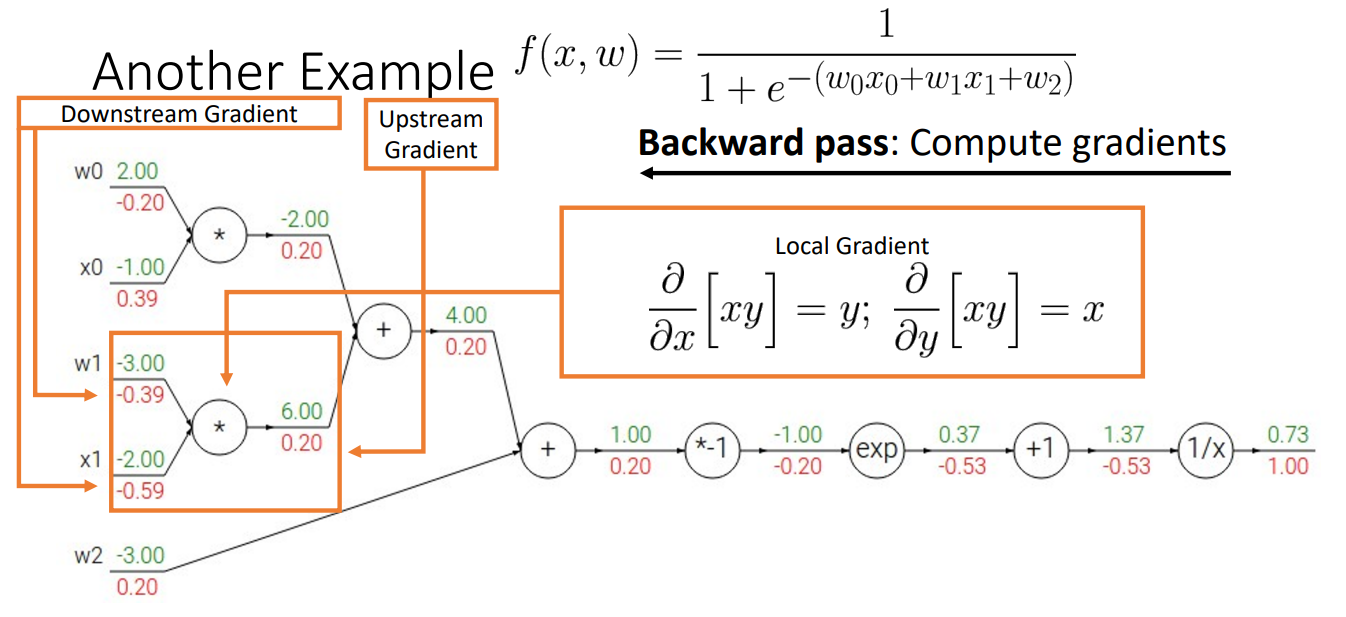
- 위와 같이 각 노드에서 Upstream Gradient와 Local Gradient를 이용하여 Downstream Gradient 계산 가능.
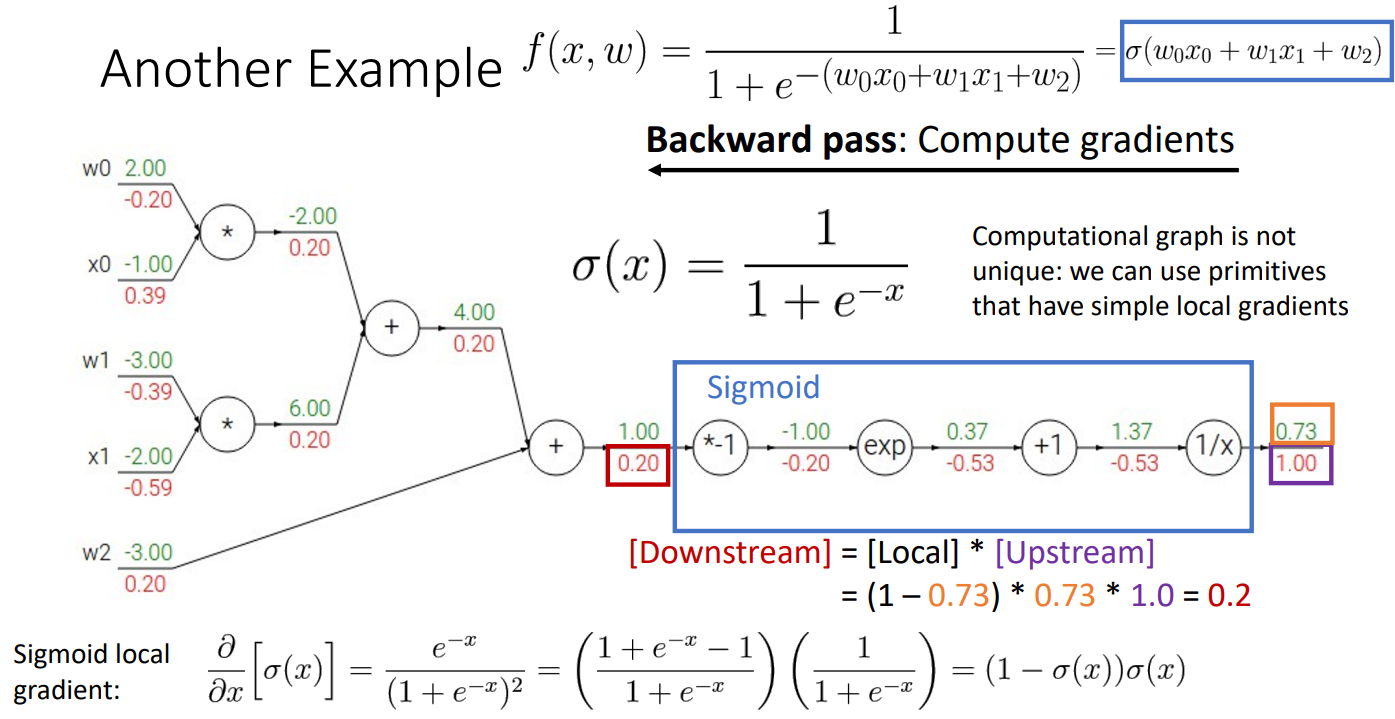
-
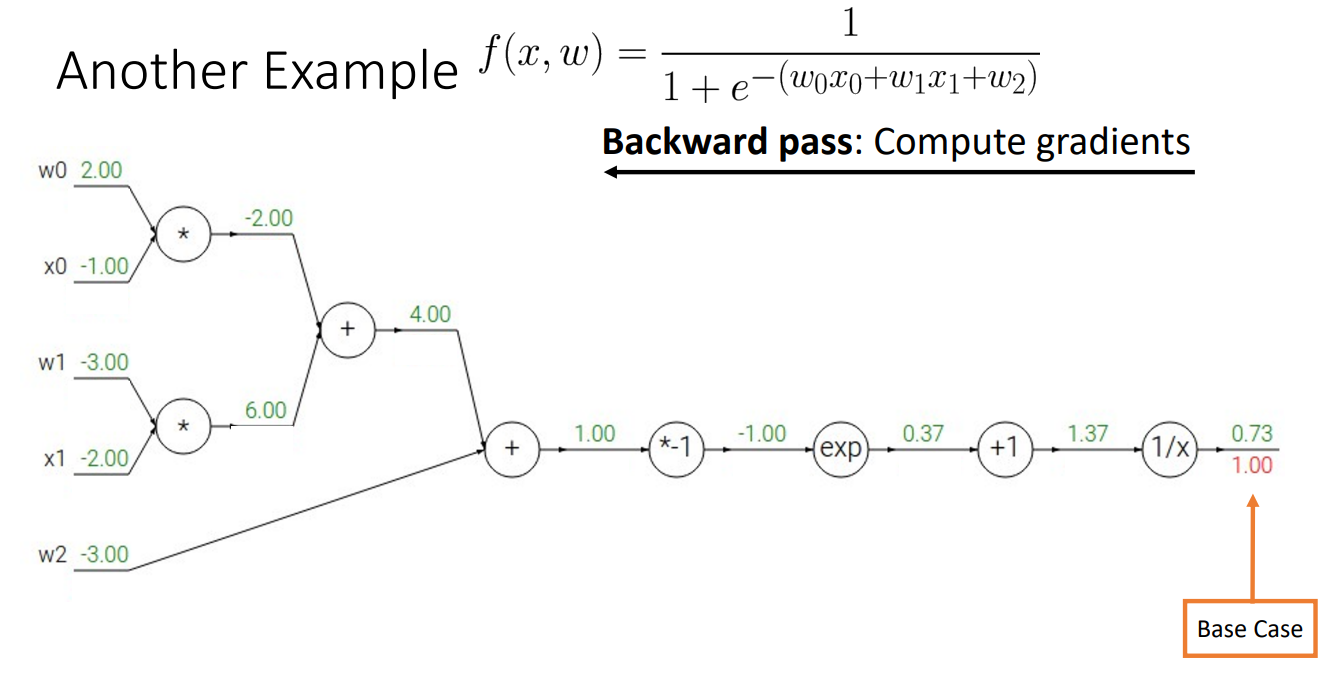
위의 파란색 네모박스 부분은 Sigmoid함수 부분이며 이 부분을 하나의 함수로 합쳐서 계산도 가능
-
이를 통해서 더욱 간단하게 계산이 가능
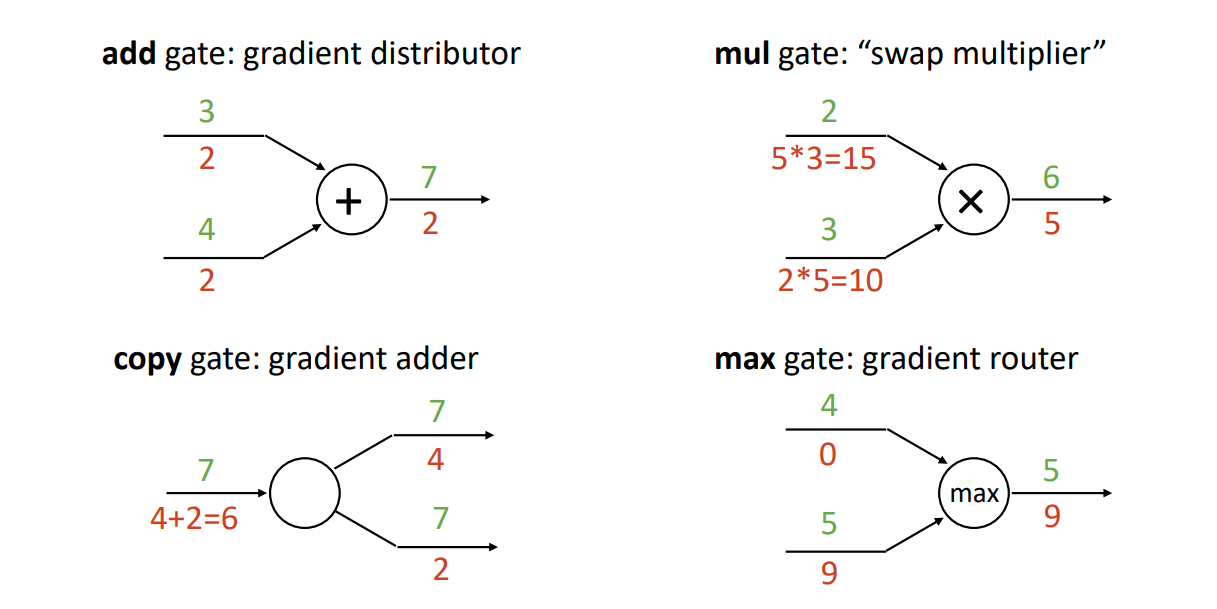
- 그리고 몇가지 패턴을 통해서 계산 없이 Downstream Gradient을 직관적으로 확인 가능

- 위의 그림에서는 곱하기, 더하기, 시그모이드 패턴을 이용하여 쉽게 gradient를 계산
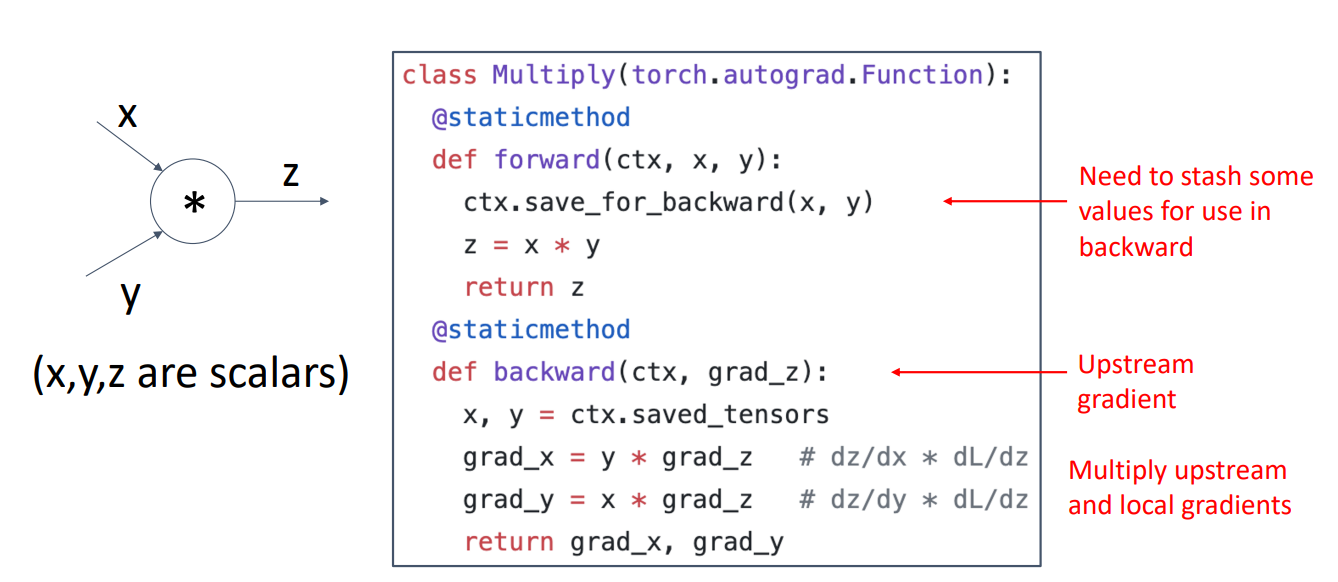
- 위와 같은 방법으로 실제 코드에서도 동작
What about vector-valued functions?
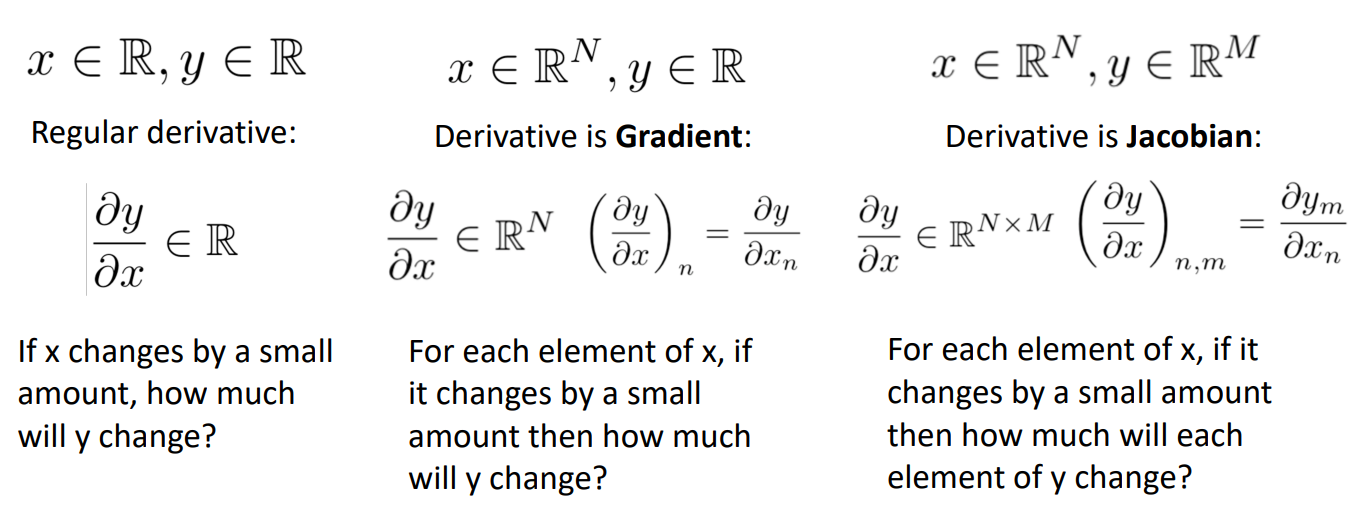
input이 scalar이고 Output이 scalar
--> 미분값: scalar 형태
input이 N차원이고 Output이 scalar
--> 미분값: N차원, Gradient로 미분
input이 N차원이고 Output이 M차원
--> 미분값 : N * M 차원, Jacobian으로 미분

- 최종 Loss는 항상 scalar 값이기 때문에 는 z의 차원에 해당하는 n차원을 가짐
- Local gradient는 x의 차원과 z차원의 곱인 m x n 차원을 가짐

-
ReLU 함수를 예시로 보면
-
Upstream gradient ( )와 local gradient ( )의 곱을 통해서 계산
-
이때 실제 계산에서는 input과 output의 데이터가 매우 커서 자코비안 행렬의 sparsity가 매우 크므로 아래와 같이 나타냄

- 2차원 이상의 다차원 Tensor에서는 어떻게 계산될까?

-
X,Y가 Matrices이며 Z도 Matrices일때 Loss는 마찬가지로 scalar 값을 가짐.
-
Upstream gradient는 Z의 size과 같은 로 나타남
-
Local Jacobian matrices는 input과 output의 곱으로 나타남
-
Downstream gradient는 input size와 같게 나타남.
-
이때 X,Y,Z는 X 형태이지만, 이를 vector로 flatten하여 계산을 해도 의미는 같음
-
1차원의 데이터를 가지고 자코비안 행렬을 해도 많은 연산량과 낮은 효율을 보였는데, 고차원의 데이터를 가지고 자코비안 행렬을 계산하면 더 많은 연산량과 비효율 발생
Example : Matrix Multiplication

-
위의 그림을 element-wise하게 계산해보면
-
forward과정에서 = ++이므로
-
= 이고 이 과정을 반복하여
-
=
-
=
-
=
-
=
-
=
-
=
-
위의 행렬을 이용하여 = * = 계산

-위와 같이 계산
Backpropagation: Another View

- Backpropagation을 할때 Chain rule에 의하면 는 들을 곱해준 것과 동일
- 이때, 들은 matrices이고, 만 vector이므로 먼저 계산하여 오른쪽부터 왼쪽으로 계산하면 이 곱들을 matrices multiplication만으로 해결 가능 --> 효율적