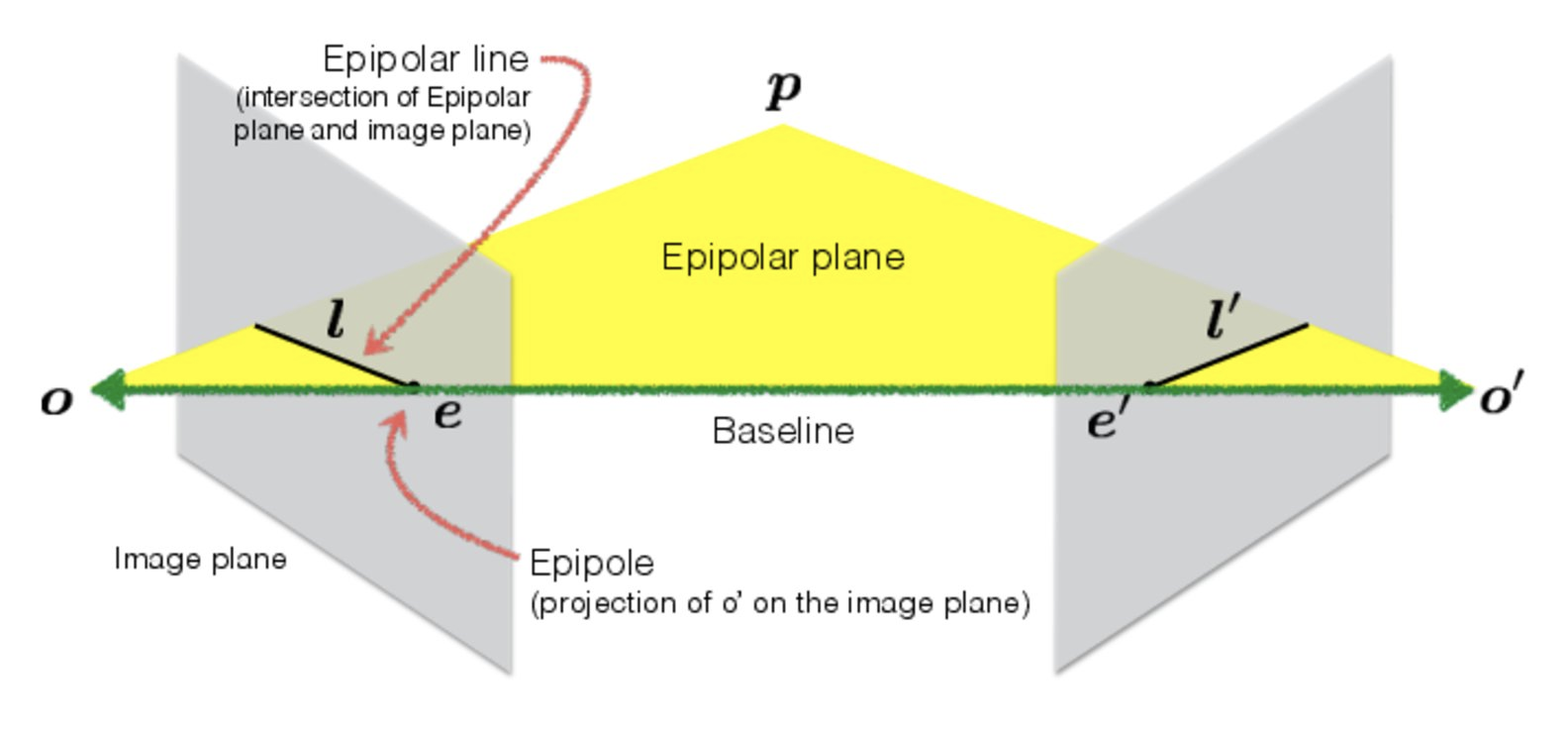
Epipolar geometry
- : 3D object point
- : 가 투영되는 2개의 image plane에서의 좌표
- : 두 카메라의 원점
- : 두 카메라의 원점을 이어주는 baseline이 image plane과 만나는 점으로 Epipole이라고 정의한다.
- : 평면 를 Epipolar plane이라고 부르며 이 평면이 image plane과 만나는 교선을 Epipolar line이라고 한다.
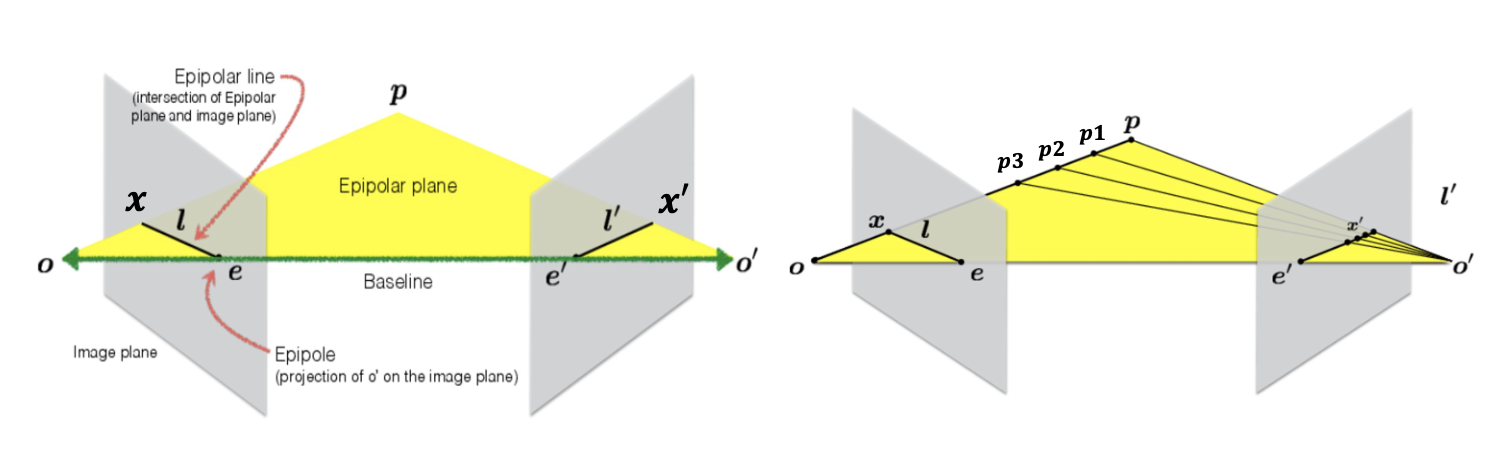
- 왼쪽 image plane에서의 좌표 를 지나는 ray는 오른쪽 image plane의 epipolar line으로 투영된다.
- 는 전부 같은 ray 상에 있어 왼쪽 image plane에는 동일한 좌표 로 투영되어 depth를 알 수 없지만 오른쪽 image plane에서는 각각 다른 위치에 투영되어 depth 정보를 가질 수 있다.
Essential matrix
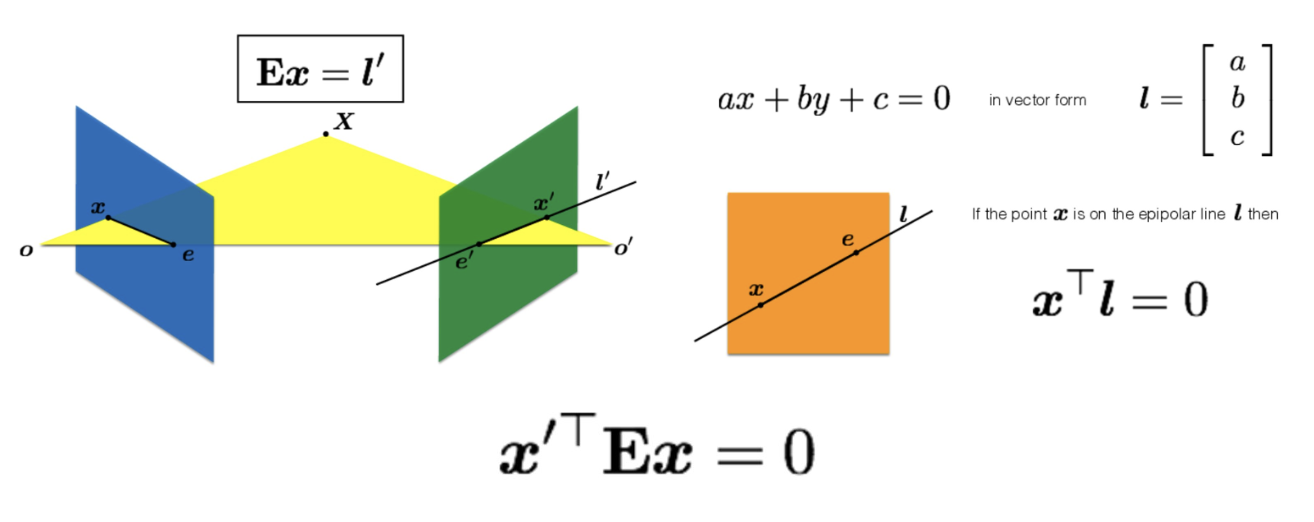
- 를 로 맵핑해주는 행렬을 (Essential matrix)라고 하자. 는 point를 line으로 맵핑해준다는 점에서 point를 point로 맵핑하는 (Homography)와 차이가 있다.
- 직선 은 선형방정식으로 표현할 수 있으며 라 할 때 직선 위의 점 에 대해서 로 나타낼 수 있다.
- 두 식을 통해 이라는 식을 도출할 수 있다.(epipolar constraint)
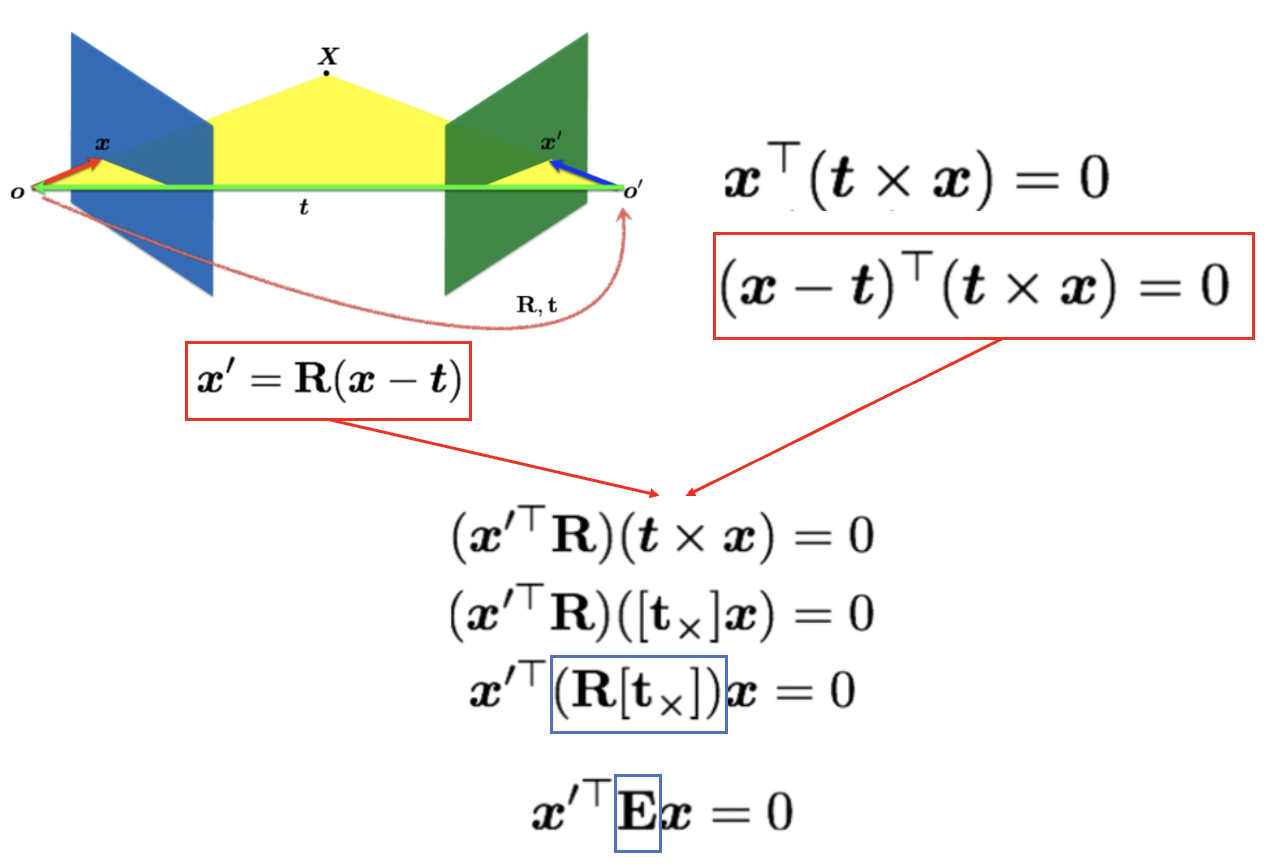
- 와 의 관계는 roation과 translation으로 표현할 수 있다.
- 는 동일한 평면(Epipolar plane) 상에 존재하므로 가 성립한다. 이러한 성질로부터 도 동일 평면 상에 있으므로 도 성립한다.(coplanar vectors)
는 평면에 수직인 벡터이므로 와 내적하면 0이 된다.
- Rigid motion과 coplanarity로부터 얻은 두 식으로부터 그림 아래의 식을 얻을 수 있으며 외적을 skew symmetric matrix로 나타내고 변환하면 가 곧 임을 알 수 있다.

Fundamental matrix
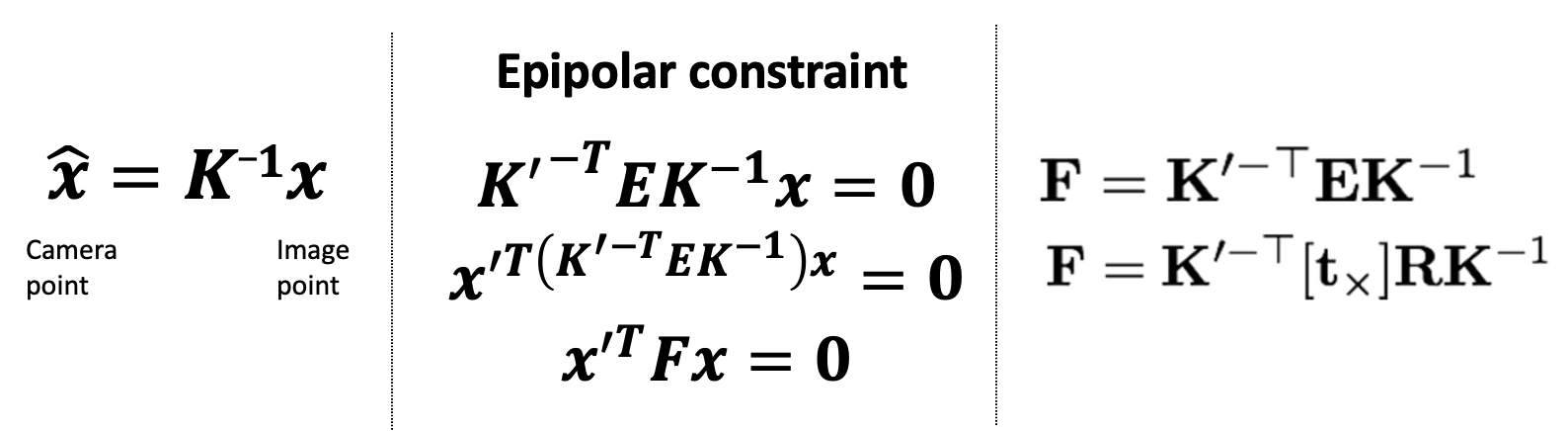
- 더 일반적인 상황으로 focal length가 1이 아닌(즉, intrinsic matrix가 가 아닌) matrix
- Intrinsic matrix 가 camera to image 변환이었으므로 역행렬을 활용하여 를 얻을 수 있다.
- 위 식을 Epipolar constraint에 적용하면 임을 알 수 있고 와 마찬가지로 과 로 표현할 수 있다.
