3D Geometry Study_Week3(The 8-point algorithm)
The 8-point algorithm
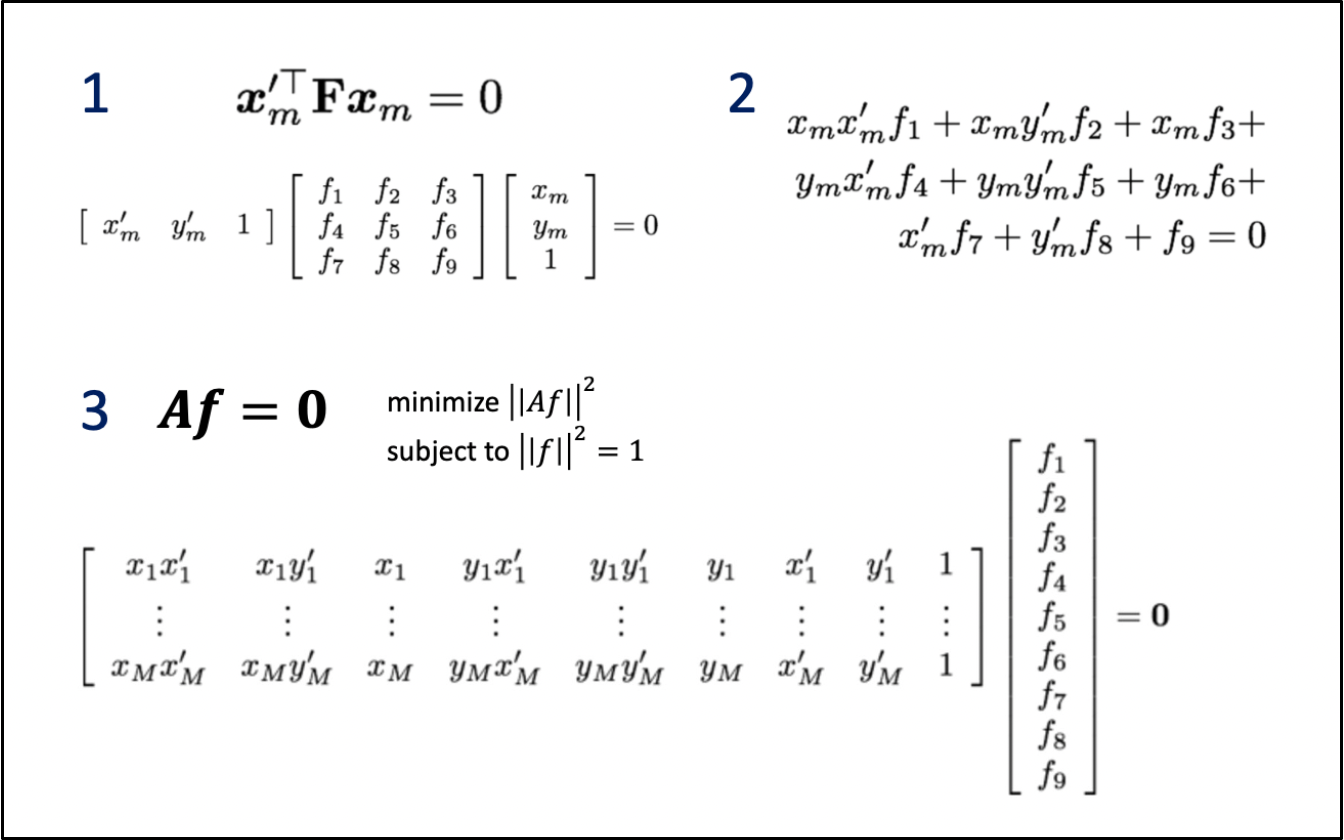
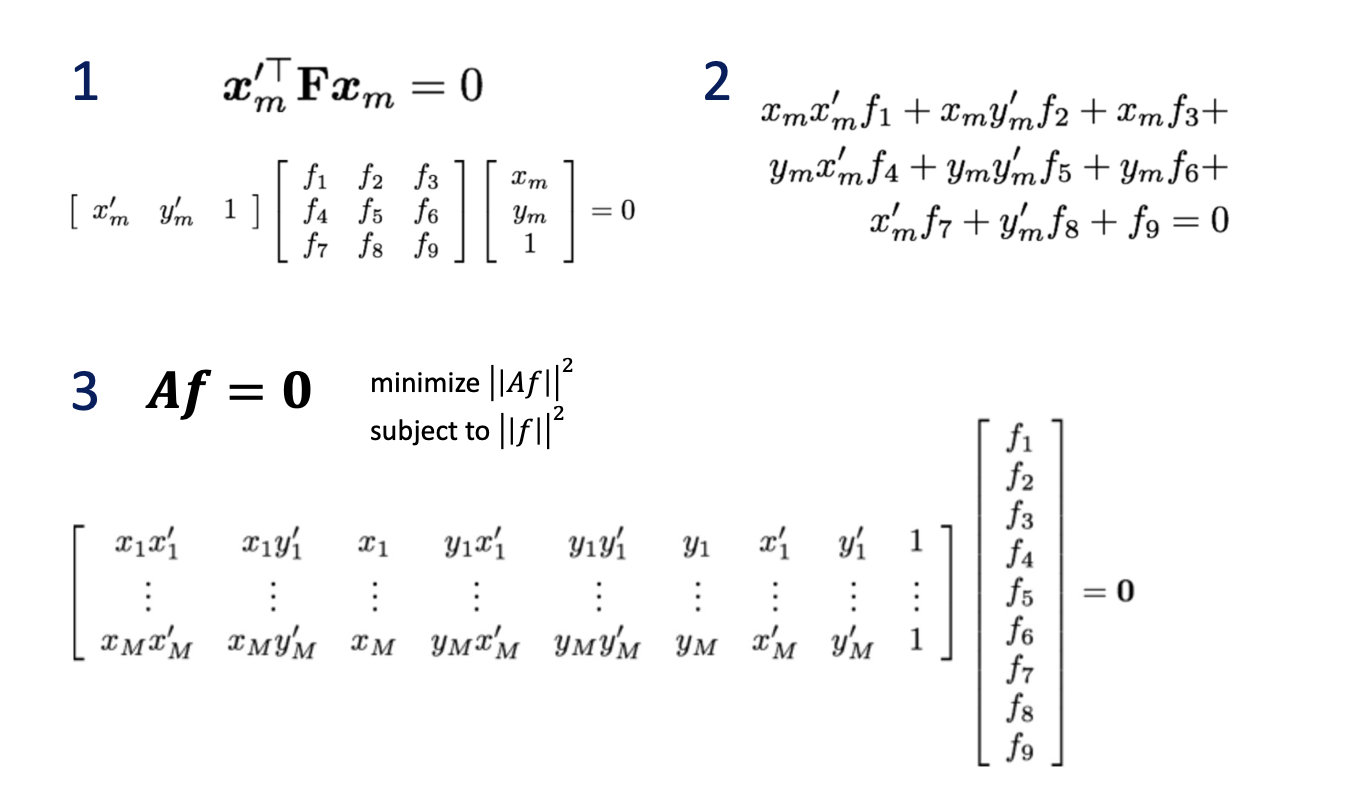
- Fundamental matrix F를 구하기 위해서는 8개의 매칭쌍이 필요하다.(homogenous coordinate를 사용하기 때문에 f9는 1이다)
- 식을 풀어쓰면 그림2와 같다.
- 매칭쌍이 M개일 때 그림3과 같이 Af=0으로 나타낼 수 있으며 ∣∣f∣∣2=1이라는 조건 하에 ∣∣Af∣∣2를 최소화하는 문제가 되어 SVD로 풀 수 있다.
Enforcing rank constraints
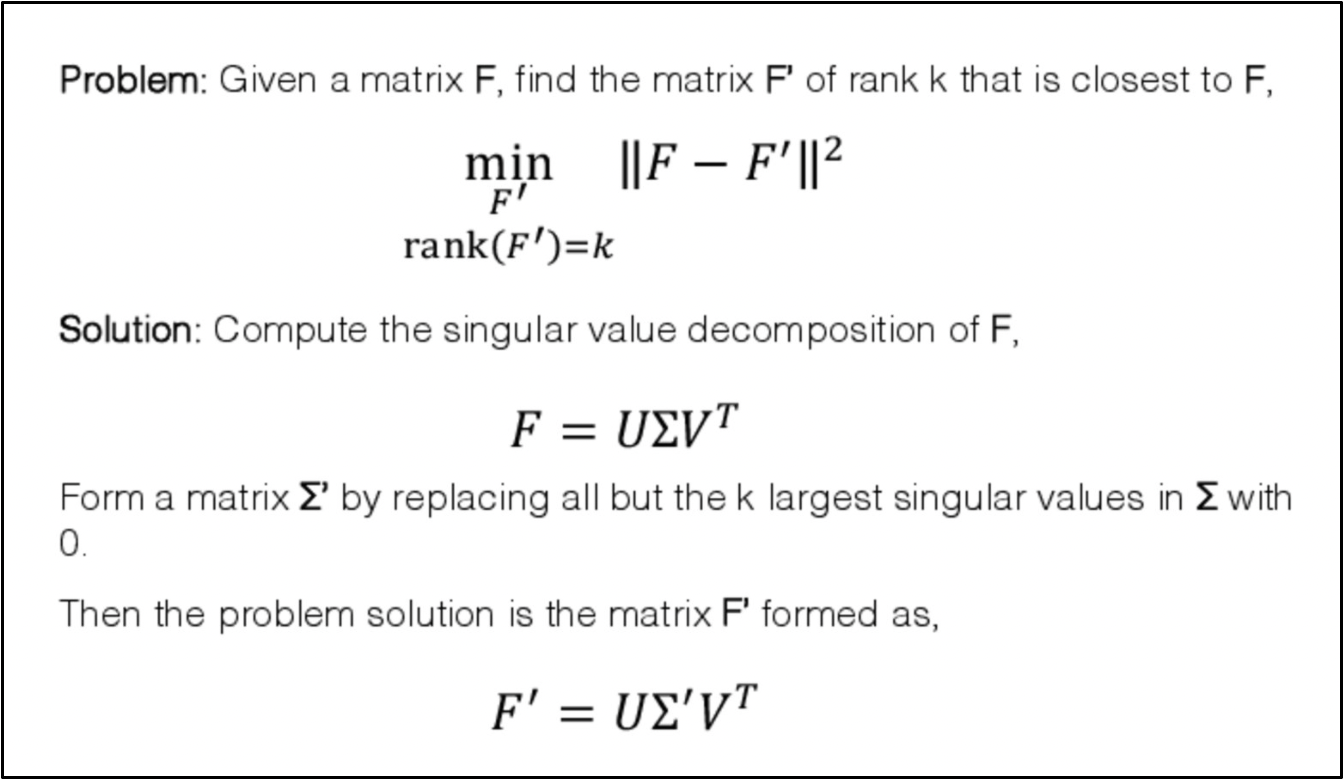
- F는 3x3 행렬이지만 point to line의 변환이므로 rank가 2가 되어야 한다.
- 따라서, rank가 3인 경우 SVD를 통해 F=UΣVT의 꼴로 분해를 한 뒤 마지막 singular value는 0으로 바꿔 강제로 rank를 2로 만들어준다.
강의

8 points algorithm 에서 Af 행렬식 오류가 있는것 같습니다 x'과 x가 바뀐 것같습니다