Abstract
- Convolutional Network의 구조를 end-to-end, pixels-to-pixels 방식으로 학습시켜 semantic segmentation 분야에서 SOTA 달성
- 임의의 사이즈의 이미지를 인풋으로 넣었을 때, 동일한 사이즈의 아웃풋이 나오도록 fully convolutional network를 구성하여 사용한다.
- 기존 classification network인 AlexNet, VGGnet 등을 fine tuning하여 사용하며 coarse(전반적인) 정보와 fine(세밀한) 정보를 혼합시킨다.
Introduction
- Convnet의 유용성은 classification 뿐만 아니라 object detection, par and key point prediction, local correspondence로 점차 발전해왔다.
- 이처럼 점점 더 세부적인 정보를 예측하게 되면서 픽셀 단위의 예측까지 관심을 가지게 되었는데 이를 segmentation이라 한다.
- 본 논문은 픽셀 단위의 예측을 위한 최초의 end-to-end 방식이자 지도 사전 학습을 활용한다.
- 기존의 네트워크에서는 dense한 형태의 아웃풋이 나오나 본 논문에서는 동일한 사이즈의 아웃풋을 리턴하기 위해 upsampling 기법을 활용한다. 따라서, 이미지에 대한 전처리나 후처리가 필요하지 않다.
- skip 구조를 활용하여 이미지의 전반적인 정보와 세부 정보를 혼합시킨다.
Fully convolutional networks
Adapting classifier for dense prediction
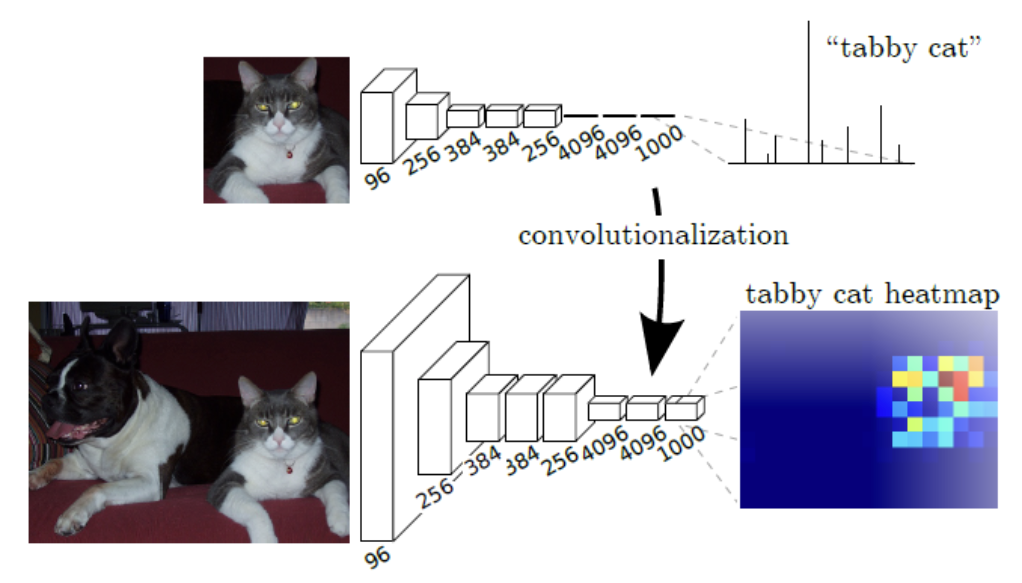
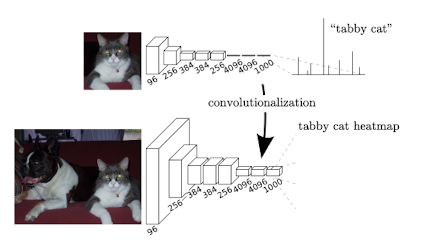
- 기존의 네트워크(LeNet, AlexNet 등)들은 아키텍쳐의 끝 부분에 FC layer가 있어 공간 정보를 담지 못한채 output이 나오게 된다.
- Segmentation의 경우 공간 정보를 유지하여 픽셀 단위로 예측해야 하므로 이러한 문제를 1x1 Conv를 활용하여 spatial dimension이 나오도록 만든다.
- 또한, 기존 CNN의 경우 input으로 패치를 받는 반면 FCN에서는 전체 이미지를 받아 효율적인 계산량을 가지게 된다.
Shift-and-stitch is filter rarefaction
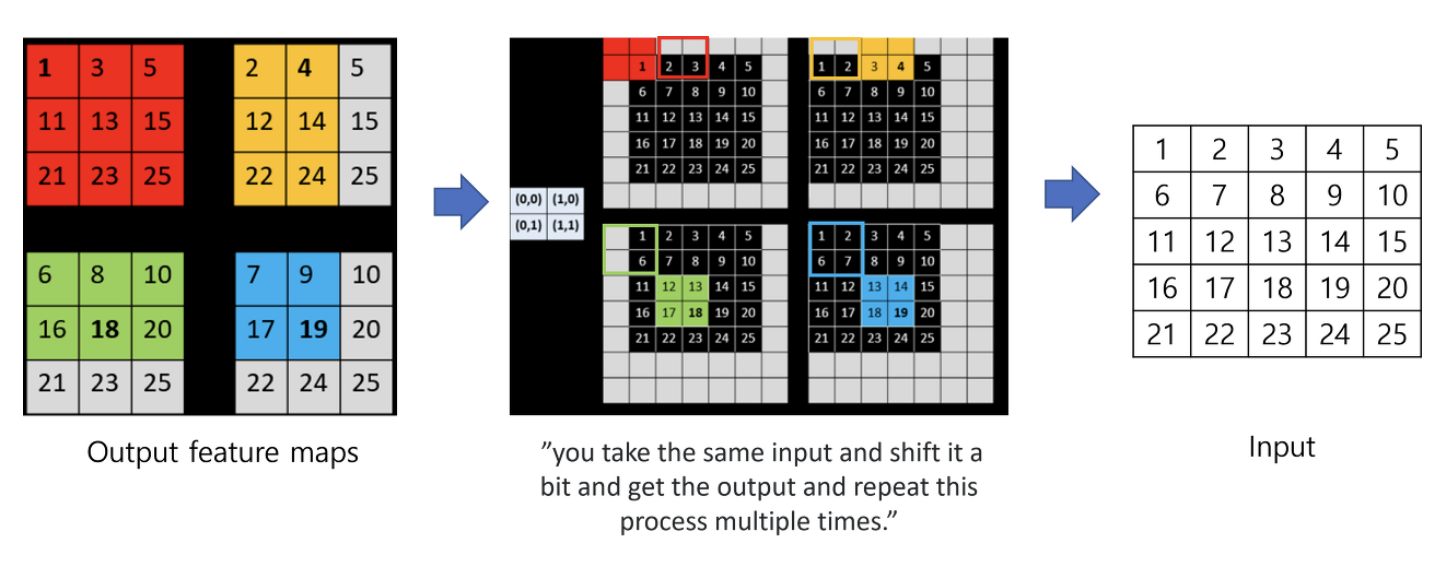
- coarse한 output으로부터 dense prediction을 얻는 방법으로 OverFeat 논문에서 쓰였던 Shift-and-stitch 방법 소개
- Pooling 커널의 사이즈나 stride에 변화를 주는 경우 trade-off가 존재한다. Downsampling을 작게 할 경우 receptive field가 작아 연산량은 많으나 finer한 정보를 얻게 된다.
- Shit-and-stitch trick을 쓰면 커널의 사이즈나 stride의 감소 없이도 패딩 방식을 다양하게 하여 dense prediction을 만들 수 있지만, receptive field가 작을수록 finer한 정보를 얻기에 제한적일 수 있다.
- 본 논문에서는 결과적으로 이 방식 대신 skip layer fusion을 사용한다.
Upsampling is backwards strided convolution
Upsampling을 하여 dense map을 얻는 방법으로 2가지 방법이 더 소개된다.
1)Interpolation
주어진 값들 사이의 값을 linear하게 추정한다.
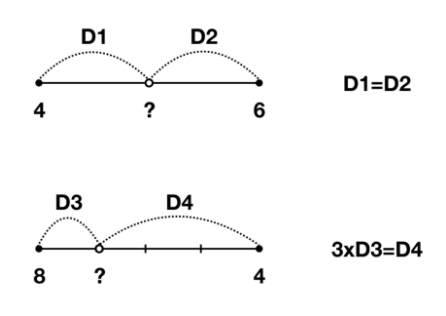
1D의 경우부터 살펴보면 위의 값은 5, 아래의 값은 7이라는 것을 쉽게 알 수 있다.
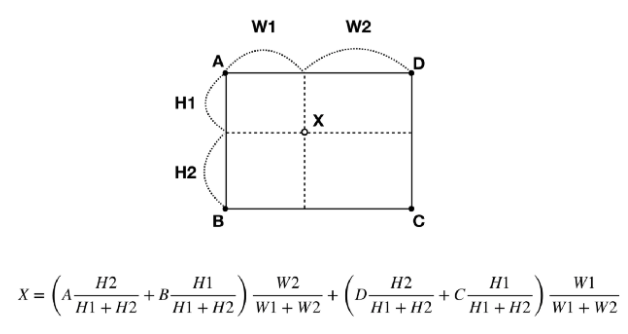
이를 2D로 확장하면 x,y 좌표를 각각 계산하면 된다. 이와 같은 방법으로 저해상도의 이미지를 고해상도의 이미지로 확장할 때 비어있는 중간값들을 유추하여 채워줄 수 있다.
2)Deconvolution
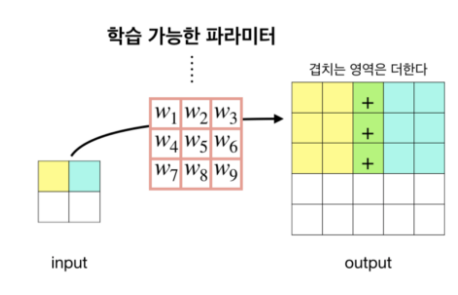
Deconvolution은 Convolution의 역연산이다. 위의 그림과 같이 겹치는 영역은 더해서 구해주면 Upsampling된 output을 얻을 수 있다.
하지만 2가지 방식 전부 이미 크게 줄어든 상태의 feature map으로부터 추정을 하는 형태기 때문에 여전히 정보손실은 클 수 밖에 없다. 따라서 본 논문에서는 skip architecture까지 적용해준다.
Patchwise training is loss sampling
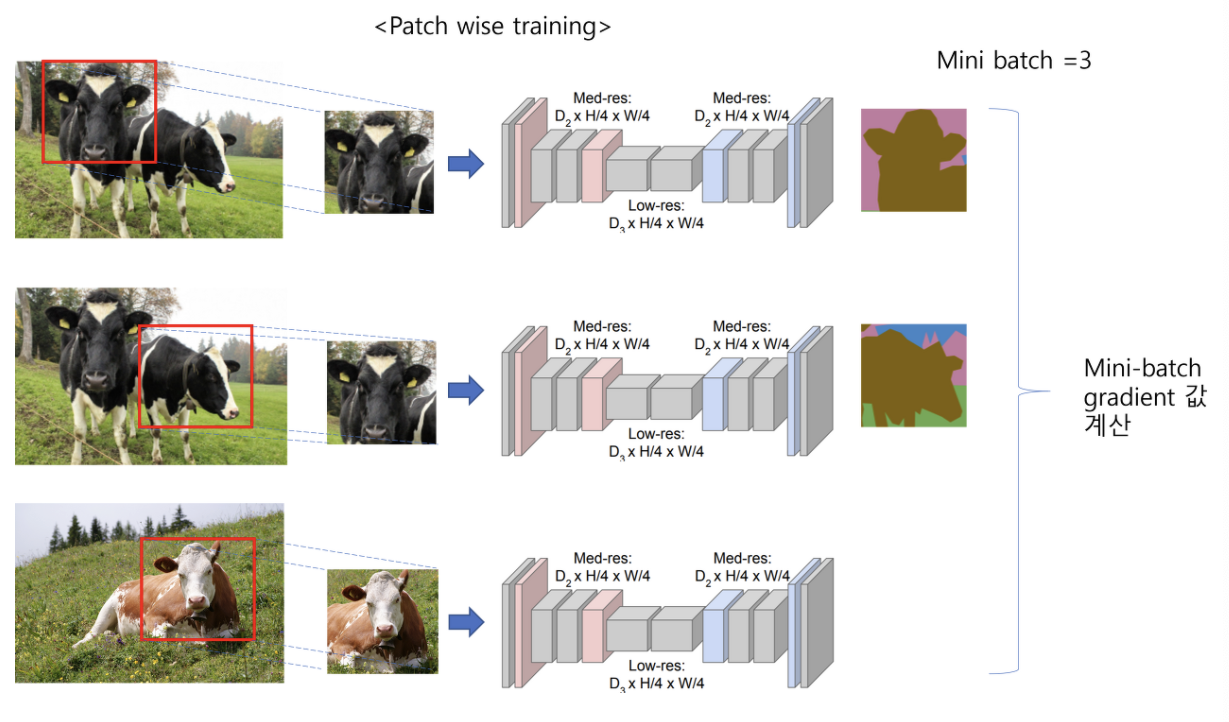
- patchwise 방식으로 학습할 경우 패치들 간에 겹치는 부분이 많아 불필요한 연산량이 많아질 수 있다. 반면, 전체 이미지를 사용할 경우 사이즈가 큰 경우 GPU 메모리를 많이 차지하여 충분한 미니배치를 잡기 어렵다.
- 패치 방식으로 학습을 시켜본 결과 더 빠르거나 loss가 잘 수렴하는 등의 장점은 없어 전체 이미지를 입력으로 받는 방식을 쓴다고 한다.
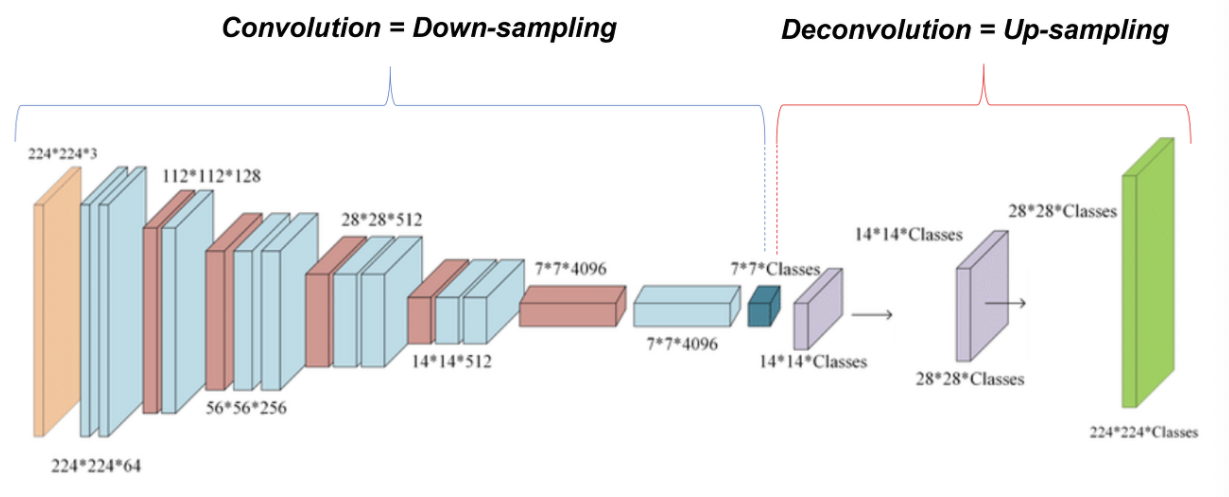
Segmentation Architecture
- FCN은 Downsampling을 하는 Encoder 부분과 Upsampling을 하는 Decoder 부분으로 구성되어 있다.
- Downsampling은 기존 CNN 구조와 동일하여 사전학습된 모델을 사용한다.
- loss function은 각 픽셀마다 multinomial logistic loss가 사용되었다.
From classifier to dense FCN
- 앞서 보았듯이 Classifier는 기존 모델들의 FC층을 Convolution으로 바꿔주어 사용한다.
- AlexNet, VGG, GoogLeNet을 사용한 결과 VGG가 가장 좋은 성능을 보였다.
- VGG와 GoogLeNet은 분류 task에서는 성능이 비슷함에도 불구하고 segmentation을 할 때는 GoogLeNet이 VGG를 따라오지 못했다.
Combining what and where
지금까지의 구조를 살펴보면 다음과 같고 해당 구조는 segmentation에서 충분한 성능을 보이지 못해 skip architecture를 제시한다.
- 논문에 나온 FCN-32는 32x32의 이미지를 input으로 하고 1x1으로 feature map을 뽑은 후 다시 32x32로 upsampling한 결과를 의미한다.
- 이와 같이 Pooling 과정을 많이 거치는 경우 정보손실이 크기 때문에 upsampling을 하여 이미지의 사이즈를 맞춰준다 하더라도 fine information이 부족하여 segmeatation에서 좋은 성능을 보이기 어렵다.
- 따라서 pooling을 덜 거친 중간 단계의 feature map들을 활용하자는 것이 skip architecture의 핵심이다.
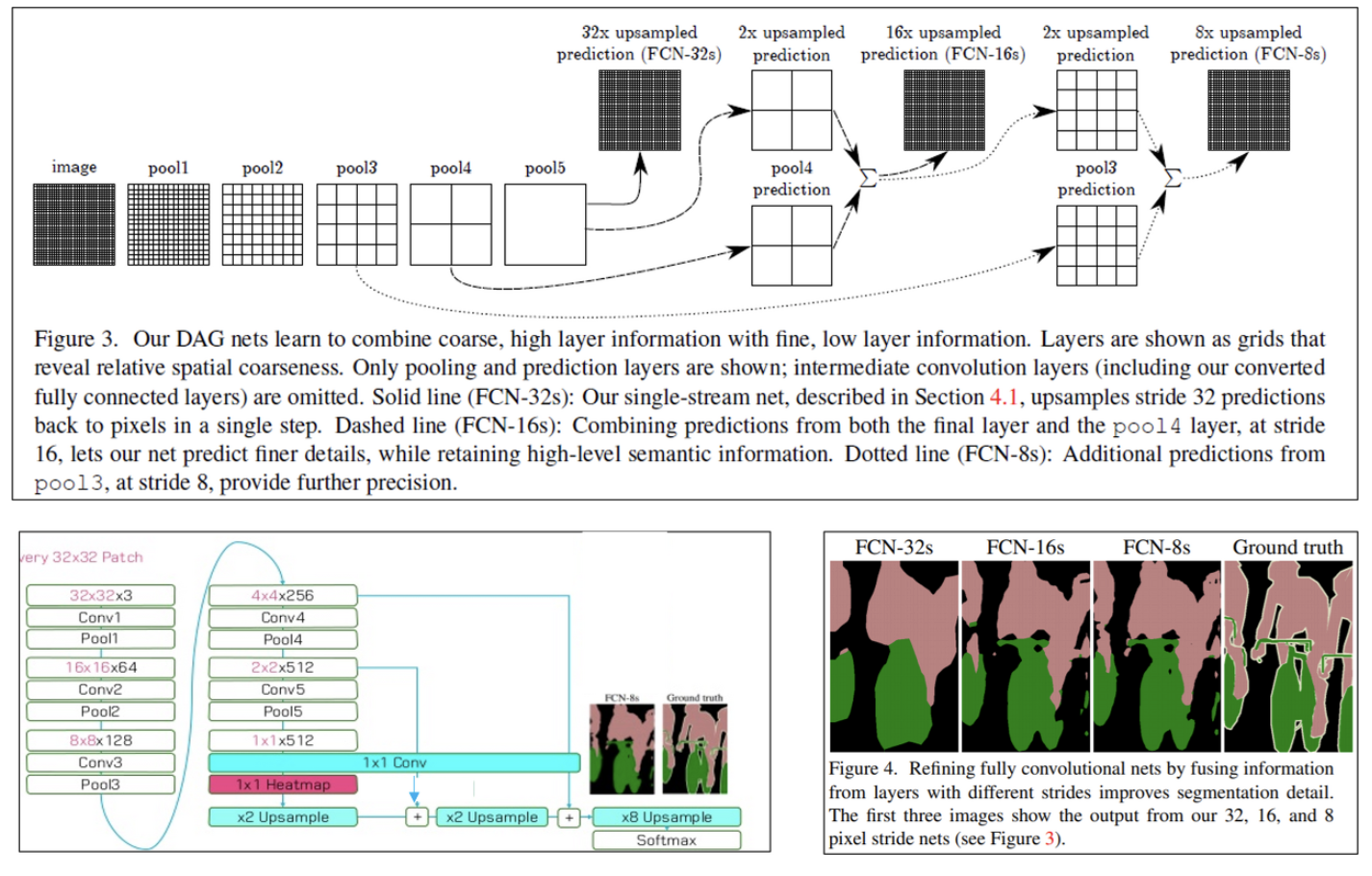
이미지의 좌측 하단 그림을 통해 FCN-16s를 설명하면 다음과 같다.
1. Pool5를 통해 생성된 1x1 feature map을 2배로 upsampling한다.
2. Pool4에서 생성된 2x2x512 feature map에서 1x1x512 필터를 적용한다.
3. 위의 두 과정에서 연산된 결과를 element-wise로 더해준 후, 16배로 upsampling하여 32x32로 만들어준다.
