📚 AI가 어떻게 움직이고 행동을 결정하는지
🧠 AI의 상태 흐름 예시
- 일반 상태 (Idle/Patrol)
- 주변을 수색하거나 지정된 경로를 순찰
- 추적 모드 (Chase)
- 적이 일정 반경 내에 들어오면 상태 전환
- 적을 따라감
- 공격 모드 (Attack)
- 적과의 거리가 가까워지면 공격 상태로 변경
- 공격 애니메이션이나 데미지 처리 수행
➡ 각 상황에 맞게 행동이 전환되는 기준(조건) 을 설정하고, 그에 따라 적절한 행동을 수행
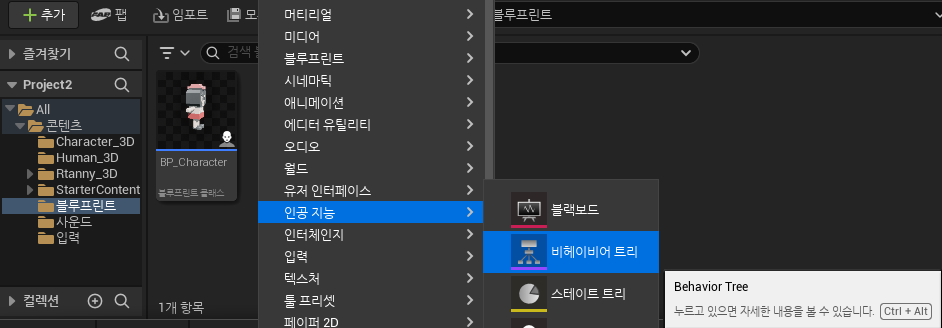
Behavior Tree
- AI의 행동을 시각적으로 구성할 수 있는 트리 구조 시스템
- Behavior Tree를 에셋으로 만들 수 있고 AI 컨트롤러에서 사용할 수 있다
🌀 Behavior Tree 구성 요소
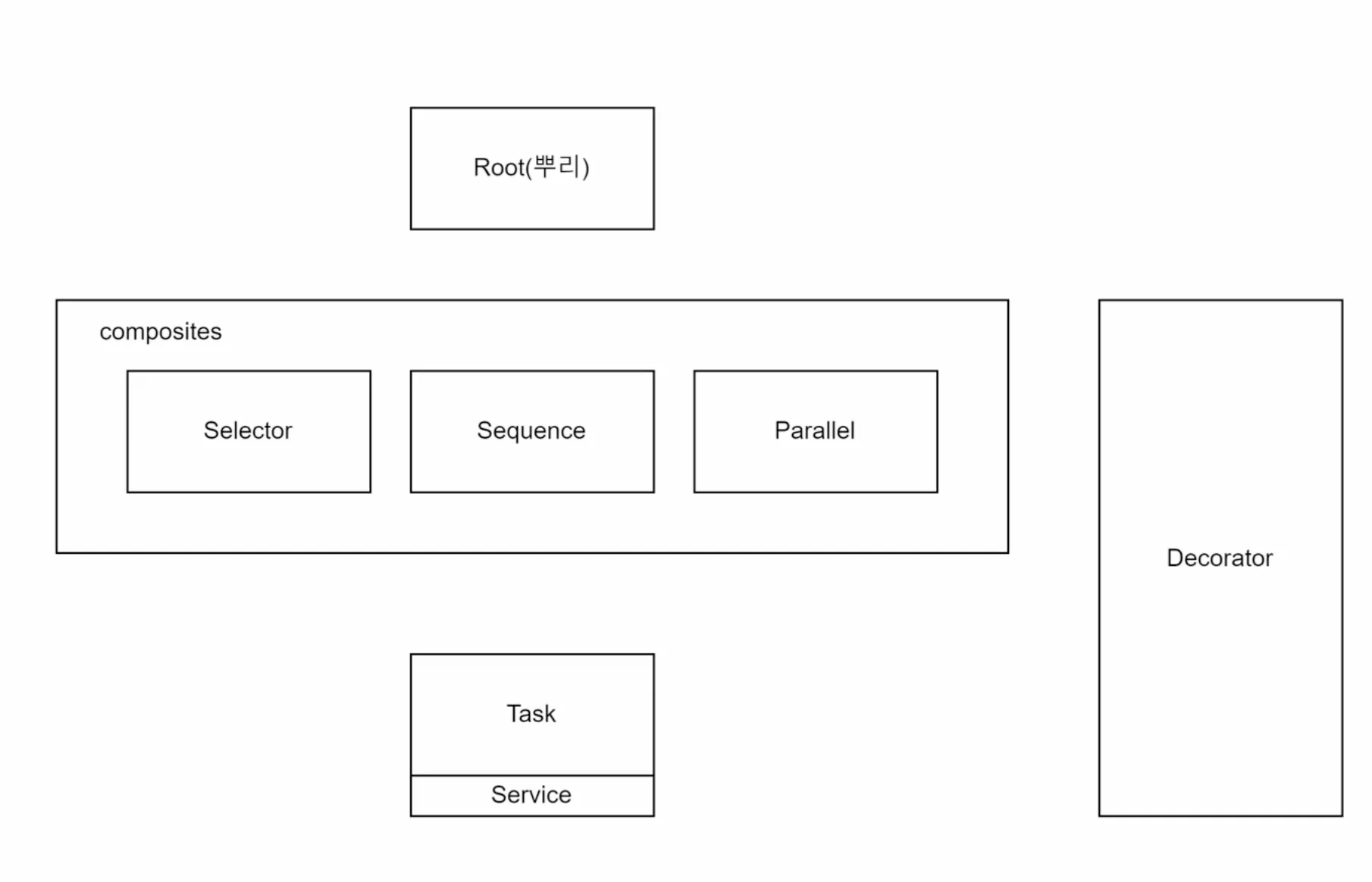
1️⃣ Root (루트)
- 트리의 시작점
- 아래 노드들을 실행하게 만드는 진입 지점
2️⃣ Selector (셀렉터)
- 선택 노드
- 조건을 검사하여 상황에 맞는 / 맞지 않는 태스크를 구분해 실행
- 왼쪽부터 순서대로 자식 노드를 실행
- 성공하는 노드를 찾을 때까지 시도함
- 하나라도 성공하면 나머지는 실행하지 않고 중단
3️⃣ Sequence (시퀀스)
- 순차 실행 노드
- 자식 노드를 왼쪽부터 순서대로 연달아 실행
- 모든 자식이 성공해야 전체가 성공
- 하나라도 실패하면 중단
4️⃣ Parallel (페럴럴)
- 동시 실행 노드 (여러 태스크를 묶어 한 번에 실행)
- 자식 노드를 같이 실행
- 어떤 조건에서 멈출지는 설정에 따라 다름
(예) 하나만 성공해도 전체 성공 or 모두 성공해야 전체 성공
5️⃣ Task (테스크)
- 실제 행동이 일어나는 곳
(예) 이동하기, 공격하기, 대기하기 등
6️⃣ Decorator (데코레이터)
- 조건을 추가하거나 특정 기능을 추가하는 노드
- 실행 가능 / 실행 불가능
- 해당 노드 또는 서브트리의 실행 여부를 결정
(예) 플레이어가 보일 때만 실행, 체력이 50% 이상일 때만 실행
7️⃣ Service (서비스)
- 백그라운드에서 지속적으로 실행되는 기능
(예) 일정 주기마다 플레이어 위치 갱신, 타겟 확인 등
- 특정 노드가 활성화된 동안 계속 돌아감| 구성 요소 | 설명 |
|---|---|
| Root | 트리의 시작점 |
| Selector | 자식 중 하나라도 성공하면 OK |
| Sequence | 자식 전부 성공해야 OK |
| Parallel | 자식들을 동시에 실행 |
| Task | 실제 행동 수행 |
| Decorator | 실행 조건 부여 |
| Service | 주기적 정보 업데이트 등 지속 실행 |
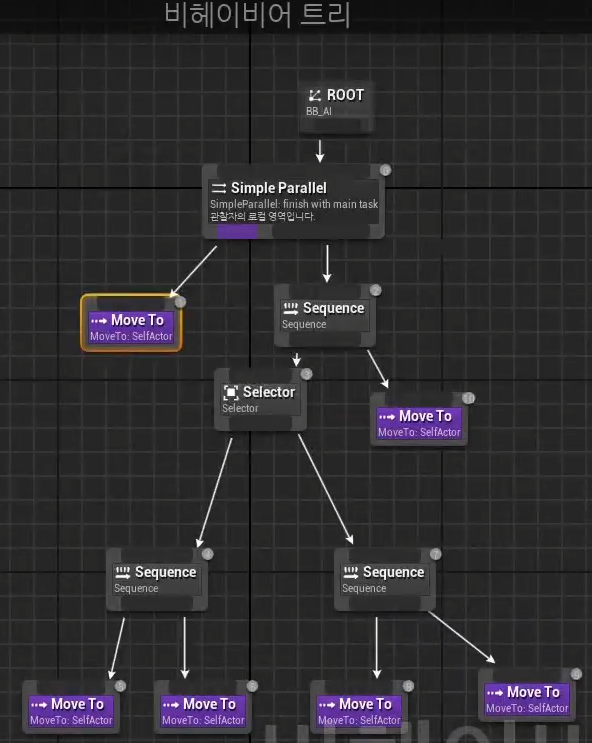
Simple Parallel
전체 분기와 또 하나의 노드를 동시에 실행
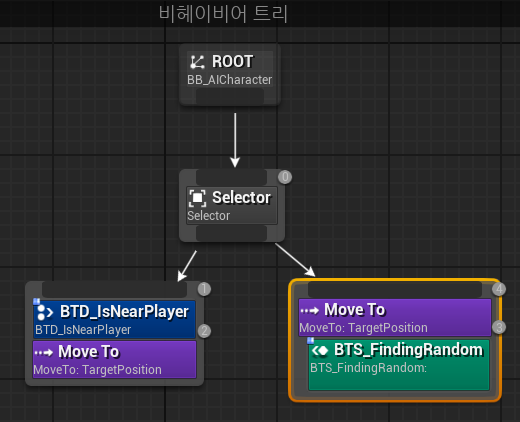
📍BT_AICharacter
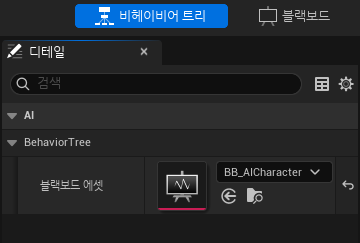
- Behavior Tree 생성
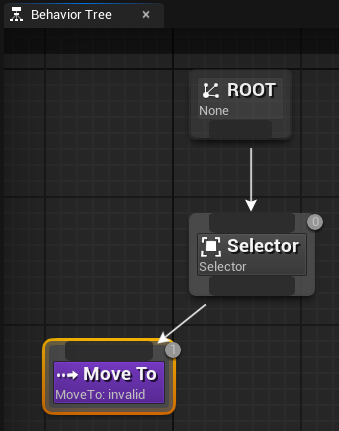
- Move To (Task)
- 블루프린트에 캐릭터를 특정 위치까지 움직이게 하는 태스크
- 📍 Move To: invalid ➡ 블랙보드(데이터를 저장하고 내보내는 에셋)을 만들어야 함
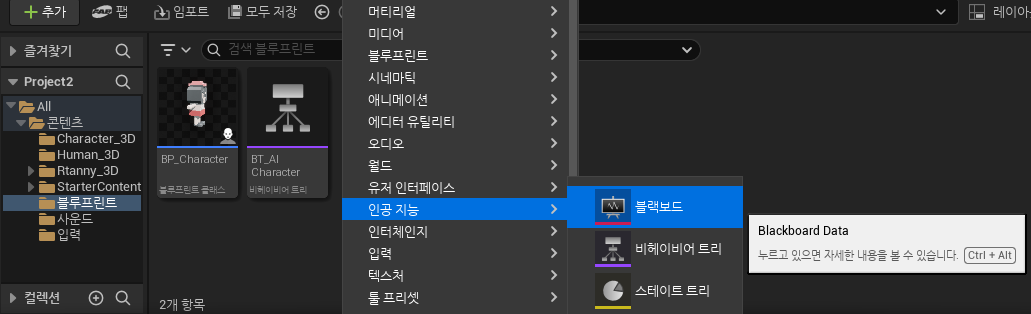
🔻BlackBoard
📍BB_AICharacter
- BlackBoard 생성
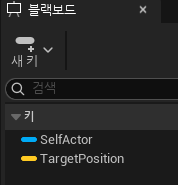
- 블랙보드 키 생성
- SelfActor (오브젝트) : 특정 액터나 컴포넌트를 기억하고 추적하는 용도
- TargetPosition (벡터) : AI가 “어디로 이동할지” 또는 “어디를 바라볼지”를 결정할 때 사용하는 위치 데이터

🔻Decorator
📍BTD_IsNearPlayer
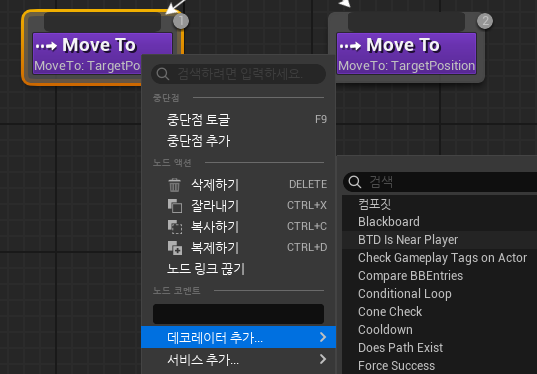
- 데코레이터 추가
- Move To 태스크 2개
➡ 조건에 따라 설정을 해주는게 달라야함
➡ 데코레이터 추가하기 - 조건 확인 후 그 안에서 실행도 가능
- 새 데코레이터에서 만들고 노드 추가하기
- Move To 태스크 2개
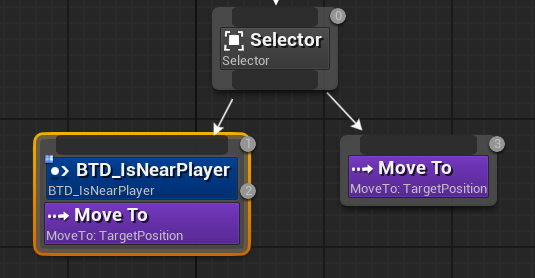 ▶ BTD_IsNearPlayer 일 때는 2번 태스크 실행
▶ BTD_IsNearPlayer 일 때는 2번 태스크 실행
▶ 아닌 경우에는 3번 태스크 실행됨 ➡ TargetPosition을 어떻게 설정하냐에 따라 다름
✔ TargetPosition 다르게 설정 ➡ 데코레이터(BTD_IsNearPlayer) 에서 설정하기
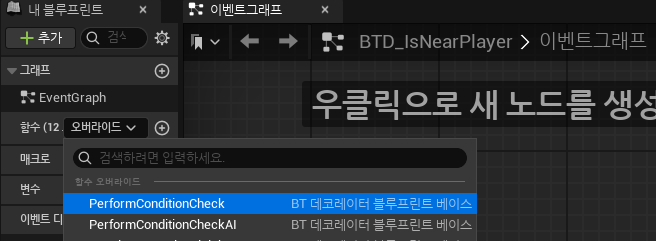
- 함수 오버라이드에서 PerformConditionCheck
- 이 값이 True면 실행 / False면 실행안함 주장
- 뒤에 AI가 붙은 항목들은 AI 컨트롤러가 조정할때 우선 실행되는 버전
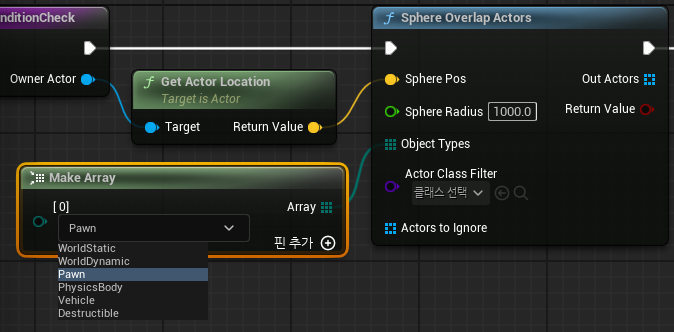
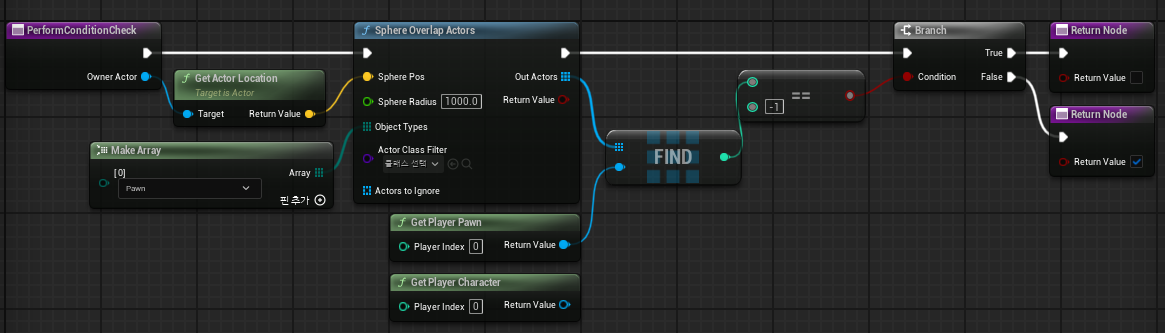
- 플레이어가 가까이 있는지 검사하기
Sphere Overlap Actors- 구 형체를 오버랩(겹침)을 판정해서 어떤 actor들이 들어있는지 확인하는 장치
- 구 형태의 중심좌표는 이 블루프린트들이 가지고 있는 Owner Actor의 위치
- 자신의 위치에서 구 형체를 검출
Sphere Radius (반경)- 1000 이내(10m)의 반경에 들어오면
Object Types- 배열로 받음 (Make Array)
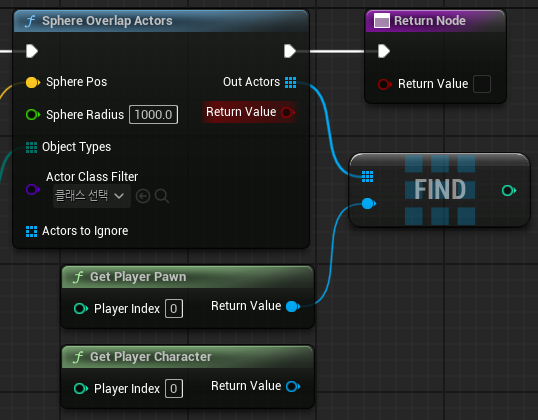
어떤 항목을 받을지?
- 주인공만 필요한 상황이므로, 폰(Pawn) 타입만 검색
- 검출된 액터들이 배열(Out Actors)로 반환
- 그중에서 주인공만 찾으면 되므로 Find 노드를 사용
✔ 이때 대상이 캐릭터든 폰이든 상관없음
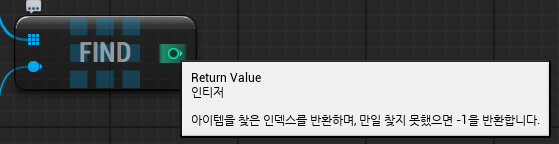
- Find 노드를 사용하여 Out Actors 배열 내에서 플레이어 폰이 존재하는지 확인
- 해당 액터가 배열에 존재할 경우 ➡ 해당 인덱스(0 이상)를 반환 ➡ 후속 작업 수행
- 존재하지 않을 경우 ➡ -1을 반환 ➡ 로직 중단 또는 예외 처리
✔ 반환된 인덱스가 -1인지 먼저 확인해야 하며 이를 위해 Branch 노드를 사용
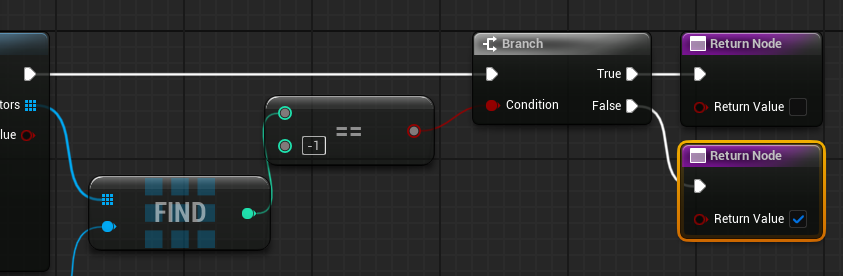
- 1인지 비교 (== -1)
- True면 = 주변에 플레이어 없음 → 실패 처리
- False면 = 플레이어 있음 → 성공 처리
- Branch 노드로 분기:
- 조건이 True →
Return Value: false (실행 실패) - 조건이 False →
Return Value: true (실행 성공)
- 조건이 True →
| Find 결과 | 의미 | 행동 실행 여부 |
|---|---|---|
-1 | 액터 없음 | ❌ 실행 안 함 (false) |
0 이상 | 액터 있음 (인덱스) | ✅ 실행함 (true) |
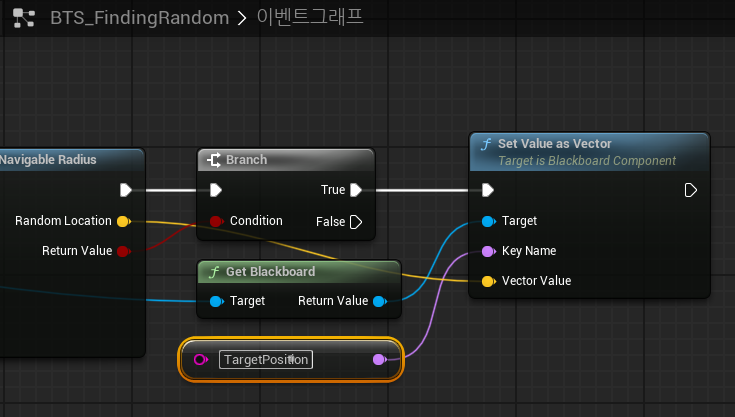
- TargetPosition을 블랙보드에 저장하기
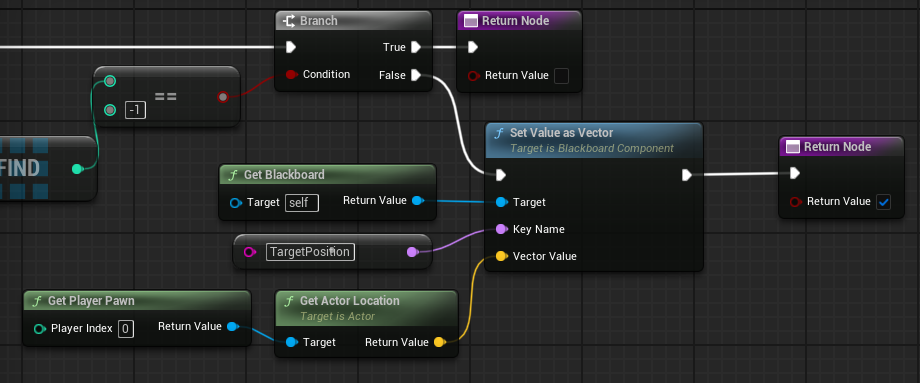
Get Blackboard(데이터를 저장하고 내보냄)Set Value as Vector- 블랙보드 안에 있는 값을 벡터로 저장
Key Name- StringToName : 블랙보드에 있는 스트링 값Name으로 변환해서 벡터를 저장 가능
Vector Value: 플레이어 폰의 위치 넣기
💥 오류
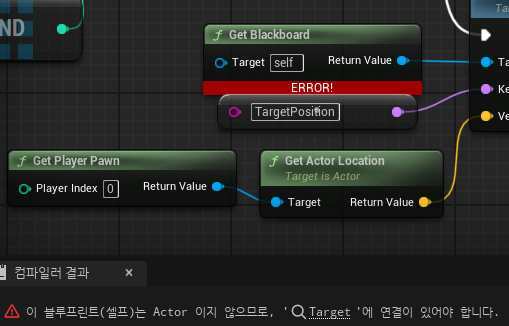
▶ BTD(Behavior Tree Decorator)는 자체적으로 블랙보드에 대한 직접적인 정보가 없음
➡ 어떤 액터가 해당 블랙보드를 사용하는지 먼저 알아야 함
➡ Get Blackboard 노드의 Target을 자기 자신(Self) 이 아니라, BTD의 Owner Actor로 연결

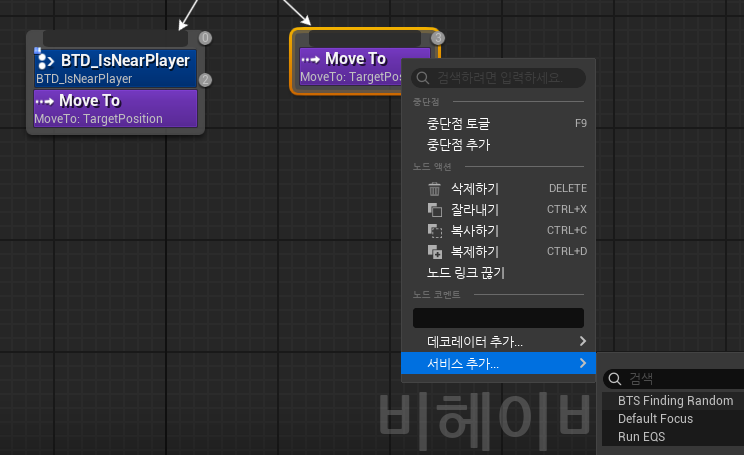
🔻Service
📍BTS_FindingRandom
- 3번 태스크의 Target Position 설정하기
- Service
- 새 서비스 만들기
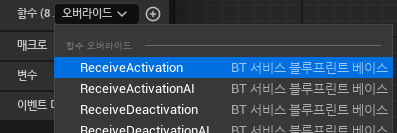 ▶ 서비스가 처음 활성화될 때 호출
▶ 서비스가 처음 활성화될 때 호출
- 새 서비스 만들기
활성화 됐을 때 Target Position을 랜덤하게 생성해야함 ➡ 내비게이션 활용
Nav Mesh Bounds Volume
내비게이션 시스템
- 넓은 땅에서 어느 위치로 가야 최적의 경로인지 찾아주고 장애물이 있으면 피해가기도 함
| 용어 | 의미 | 설명 |
|---|---|---|
| 내비게이션 (Navigation) | AI가 경로를 찾는 전체 시스템 | 경로 탐색, 장애물 회피 등 전체 로직 |
| 내비메시 (NavMesh) | 내비게이션에 사용되는 길 정보 데이터 | AI가 걸을 수 있는 영역을 격자처럼 표시한 맵 |
| 내비메시 바운드 볼륨 (Nav Mesh Bounds Volume) | 내비메시가 생성될 영역을 지정하는 3D 박스 | 이걸 배치하지 않으면 AI가 경로를 모름 |
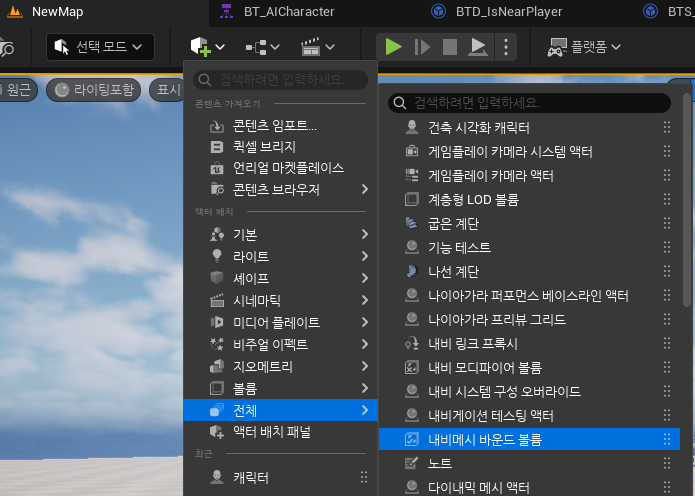
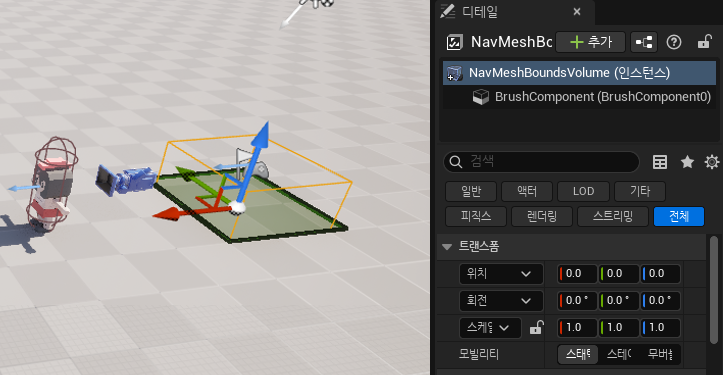
- 배치한 후 P 키를 누르면 녹색으로 내비메시가 표시 ➡ AI 내비게이션 시스템이 움직일 수 있는 영역
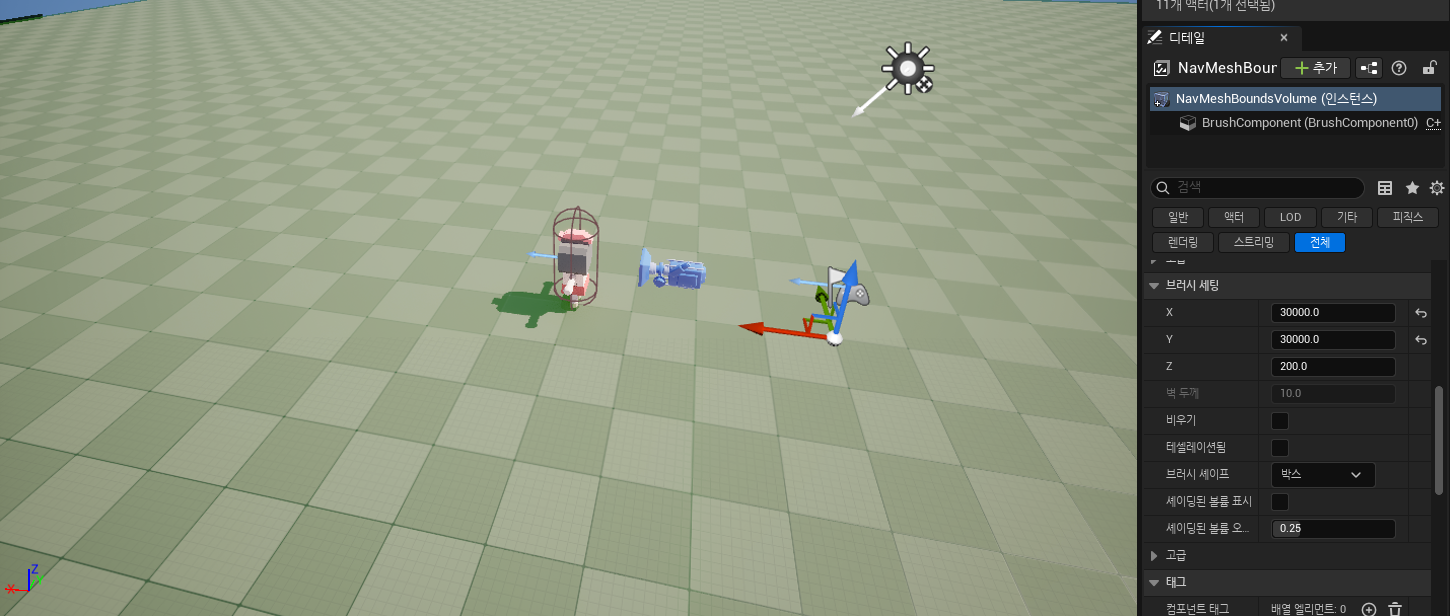
- 거리 지정
- 스케일을 키우기
- 세부 설정(디테일) > 브러시 설정
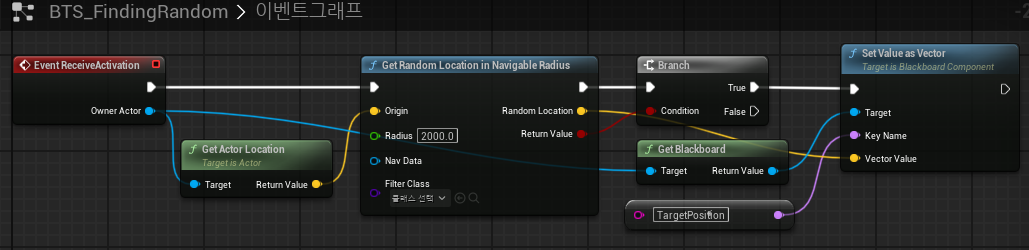
- AI가 이동할 랜덤 좌표(Finding Random Position)를 찾기 위한 블루프린트 작업으로 넘어감
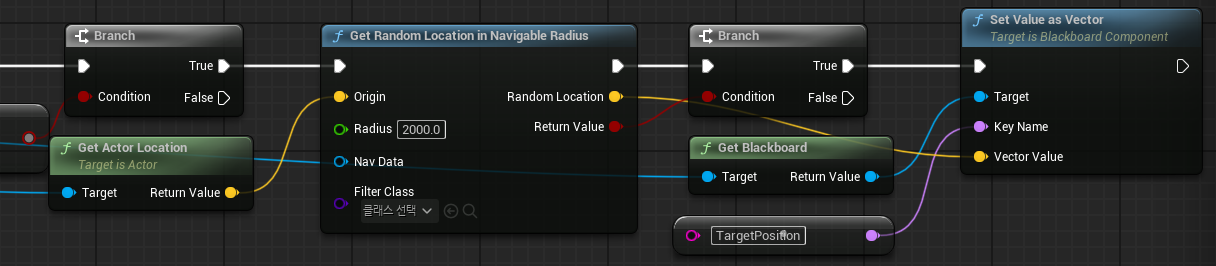
➡Get Random Location in Navigable Radius노드를 이용해 이 녹색 영역 내에서 랜덤 좌표를 가져오기
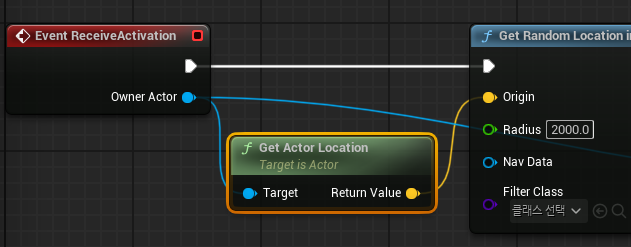
Get Random Location in Navigable Radius- 특정 위치(Origin)를 중심으로 설정한 반경 안에서 AI가 이동 가능한 랜덤 위치를 찾아줌
- 이 랜덤 위치는 반드시 내비메시(NavMesh) 안에 있어야 정상적으로 작동
➡ 내비 영역 밖이면 결과가 유효하지 않음Origin 기준Owner Actor의 현재 위치(AI 자신을 기준으로 탐색)Radius (반경)2000(20m)으로 확장하면 탐색 범위를 넓힐 수 있음Return Value (Boolean)
➡ 결과 위치가 실제로 AI가 갈 수 있는 위치이면 true
➡ 갈 수 없는 위치(예: 내비메시가 없거나 장애물만 있는 곳)이면 false
| Return Value | 의미 | 처리 방식 |
|---|---|---|
false | AI가 이동할 수 없는 위치 (장애물, 내비메시 없음) | ❌ 블랙보드에 저장하지 않음 ❌ Move To 등 행동 실행 X |
true | AI가 실제로 이동 가능한 유효한 위치 | ✅ 블랙보드에 위치값 저장 (Set Blackboard Value)✅ Move To 등 행동 실행 O |
이 좌표를 블랙보드에 set 해두면 이후 행동 노드에서 해당 위치로 이동하거나 추적하는 데 사용할 수 있음
-
Get Blackboard블랙보드 컴포넌트를 가져옴 (Get) -
Set Value as Vector해당 블랙보드에 값(Vector)을 저장 (Set)
-
서비스 추가
: 랜덤한 위치를 탐색하고 움직이기
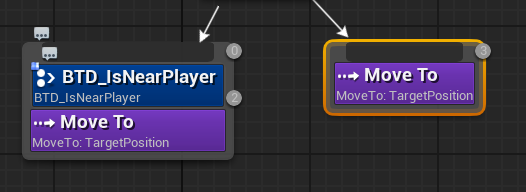
-
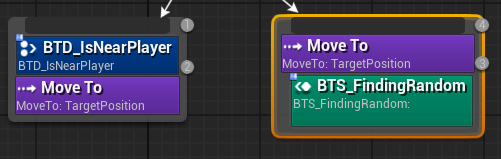
1번 노드
BTD_IsNearPlayer + Move To (TargetPosition)- 데코레이터는 조건 검사 역할
(예) 플레이어가 일정 거리 안에 있는지 확인- 조건이 참일 경우에만 아래의 Move To 노드가 실행됨
- 2번 테스크 실행 조건을 데코레이터로 제어하는 구조
- 데코레이터는 조건 검사 역할
-
2번 노드
Move To (TargetPosition) + BTS_FindingRandom- 이 Move To 노드는 서비스와 함께 실행됨
- 서비스는 특정 주기로 실행되어 블랙보드 값을 갱신하거나 환경을 체크함
(예) 일정 시간마다 TargetPosition을 랜덤하게 갱신
- 서비스는 특정 주기로 실행되어 블랙보드 값을 갱신하거나 환경을 체크함
- 이 Move To 노드는 서비스와 함께 실행됨
| 구분 | 설명 |
|---|---|
| 왼쪽 (2번) | 데코레이터(BTD_IsNearPlayer)가 조건 만족할 때만 Move To 실행 |
| 오른쪽 (3번) | Move To 실행 시, 동시에 BTS_FindingRandom 서비스도 함께 작동 |
💡정리
- 0번인 Selector 먼저 실행
- 셀렉터에서 왼쪽이 참인지 체크
- 자손 중 선택 가능한 것 하나만 실행
- 참이면 왼쪽, 거짓이면 오른쪽을 실행
- 1번 검사 성공하면 2번 실행시키고 끝
- 1번 실행 실패하면 3번으로 넘어감
- 왼쪽 ➡ 오른쪽 순으로 실행
가까우면 움직여라- Target Position(2) : 데코레이터에서 정해줌
아니면 움직여라- target position(3) : 서비스가 태스크 실행 중에 자동으로 주기 갱신함
✔ 오른쪽 테스크 노드가 실행이 되어야 검사가 이루어짐
- target position(3) : 서비스가 태스크 실행 중에 자동으로 주기 갱신함
- 우선 순위 : 데코레이터 > 서비스 > 테스크
- Sequence는 자손을 순서대로 왼쪽 ➡ 오른쪽 순으로 실행
- Simple Parallel 여러 가지를 동시에 실행
📍서비스(BTS_FindingRandom)
: 처음 실행했을 때만 랜덤 포지션을 확인
➡ 랜덤 포지션은 target position에 도달하게 되면 새로 Target Position을 설정해야함
- 함수 추가
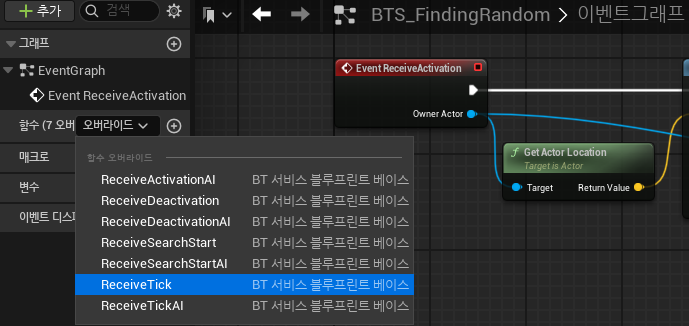
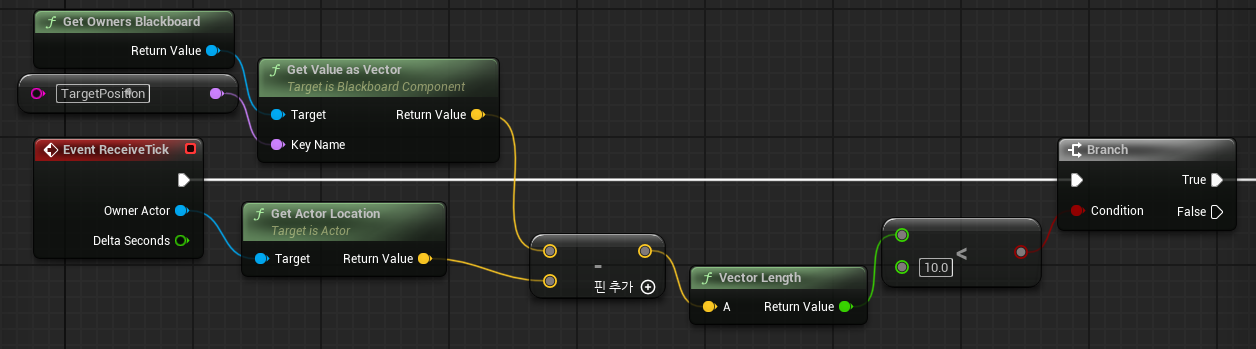
- Event Tick
- 일정시간 마다 실행됨
- 액터의 위치를 가져와 블랙보드의 위치와 비교
- 거리의 길이가 만약 10cm보다 작으면 다시 설정
- 조건 동일
- Get Actor Location와 블랙보드의 액터를 Owner Actor에 연결