Harris Corner Detection?
Harris Corner Detection이란 말 그대로 Corner를 검출하는 알고리즘 입니다. 디지털 이미지는 pixel들로 이루어져 있는데, 이미지의 특징, 패턴 등을 파악할 때 가장 중요한 point는 corner point 입니다.
따라서, 이러한 corner point를 detection 하는 것은 Computer vision에서 이미지의 특징을 파악할 때 중요한 일 중 하나 입니다.
Harris Corner Detection은 이러한 Corner Detction 알고리즘 중에 가장 기초적이면서 효율적인 알고리즘입니다.
Harris Corner Detection의 원리
Harris Corner Detection의 기본 원리는 Sliding window 방식과 동일합니다.
이미지의 한 픽셀의 중심점으로 잡고, 그 중심 픽셀에 Window를 설정해, Window 내의 픽셀값의 합을 로 설정합니다.
그 후 Window를 x축의 방향으로 u만큼, y축의 방향으로 v만큼 이동시켜서 다시 를 구해줍니다.
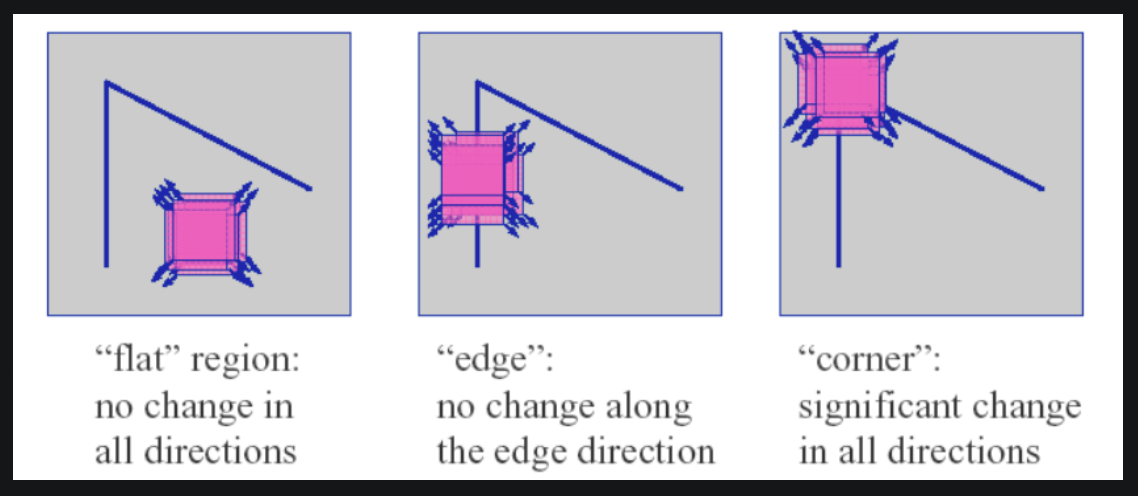
그 때 Window 내의 픽셀 값의 변화는 세가지 형태로 나타납니다.
1. Flat : 픽셀 값이 어느 방향으로든 변화가 없습니다.
2. Edge : 픽셀 값이 한 방향으로만 변화가 있습니다.
3. Corner : 픽셀 값이 모든 방향으로 변화가 있습니다.
Harris corner detection은 위와 같은 성질을 이용해 Corner를 검출합니다.
이제 알고리즘을 자세히 파악해보겠습니다.
먼저, Window가 Sliding하며 변화한 픽셀값을 계산해주어야 합니다.
이와 같이 계산하면, 만약 corner의 경우 값이 x축 방향, y축 방향 모두 클 것입니다.
여기서 는 테일러 전개에 의해 다음과 같이 표현할 수 있습니다.
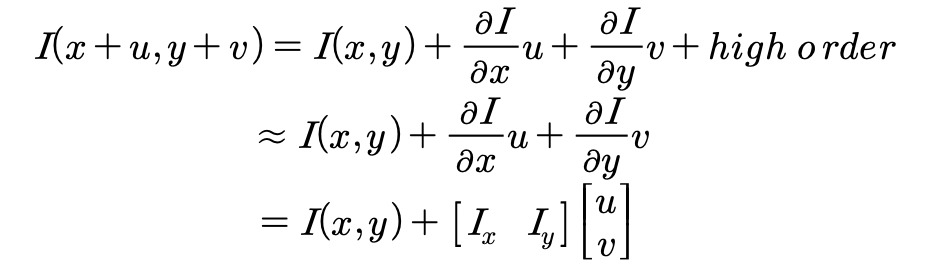
이 식을 다시 식에 대입하면
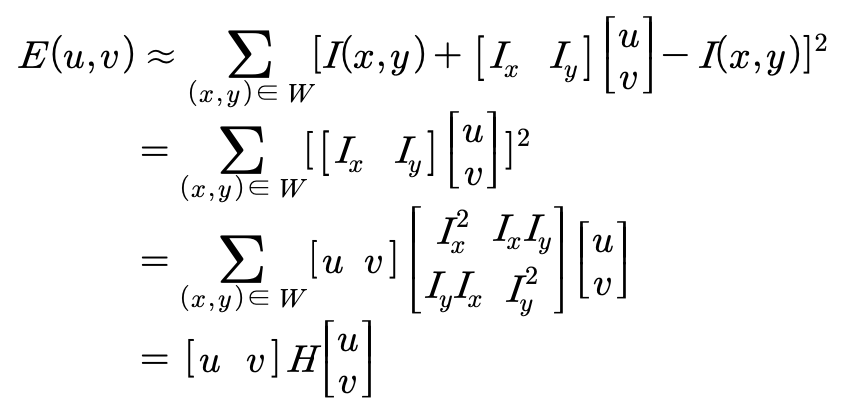
다음과 같이 행렬 곱으로 나타낼 수 있습니다.
이전에 E값이 크면 corner point라고 말했는데, E값이 크기 위해서는 위의 행렬 곱에서 H행렬의 값이 커야합니다.
이제 이 행렬을 고유값 분해하면, x, y축 중에 어느 방향으로 이미지 변화가 큰지 알 수 있을 것 같습니다.
예를 들어, 이 행렬의 eigenvalue값을 로 나타낸다면,
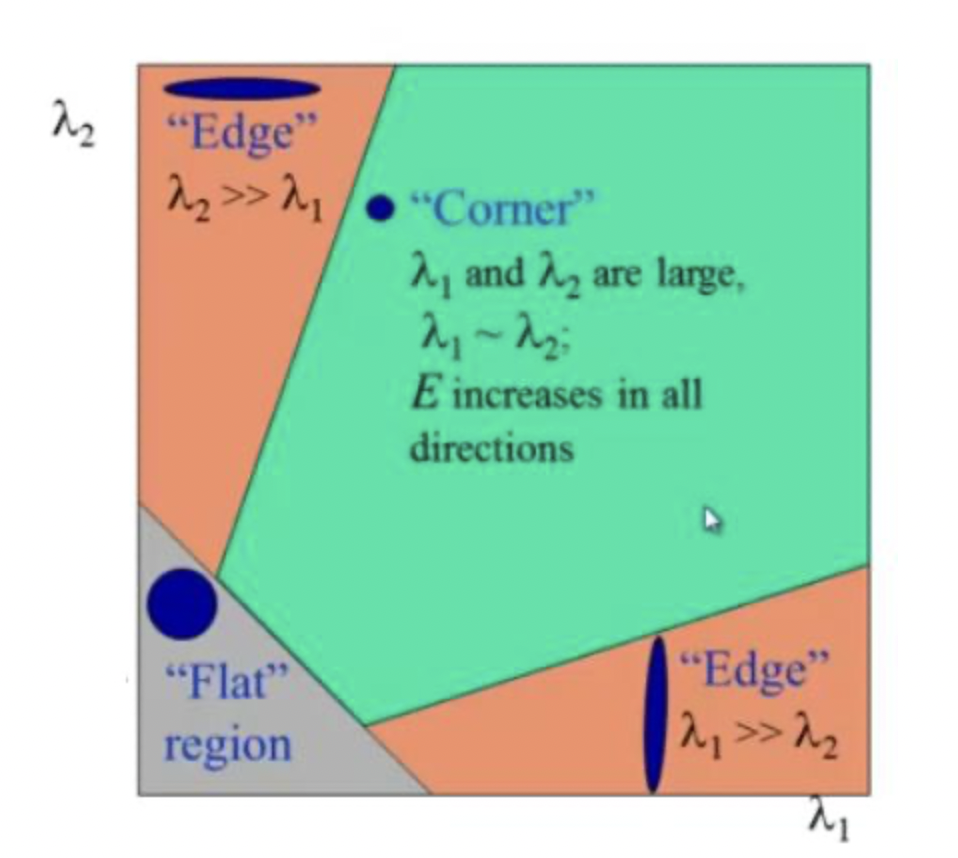
다음과 같이 eigenvalue값의 분포에 따라, edge인지 corner인지 flat인지 판단할 수 있습니다.
하지만 eigenvalue를 직접 계산하는 것은 복잡한 일이기 때문에, 다음과 같은 공식을 이용해 corner인지, edge인지, flat인지를 판단합니다.
1) : corner
2) : edge
3) : flat
이와 같은 판정식에 따라 이미지의 corner, edge, flat을 판단합니다.
Reference
[1] https://bskyvision.com/entry/Harris-코너-검출기의-이해
[2] https://salkuma.files.wordpress.com/2014/04/sifteca095eba6ac.pdf
[3] https://docs.opencv.org/4.x/dc/d0d/tutorial_py_features_harris.html
