1. Group
군(group)이란 어떤 집합과 연산자로 이루어져 있으며, G = ( ⋅ , A ) G=(\cdot, A) G = ( ⋅ , A )
닫힘성(Closure): ∀ a , b ∈ A , a ⋅ b ∈ A \forall a, b \in A, a \cdot b \in A ∀ a , b ∈ A , a ⋅ b ∈ A
결합성(Associativity): ∀ a , b , c ∈ A , ( a ⋅ b ) ⋅ c = a ⋅ ( b ⋅ c ) \forall a, b, c \in A, (a \cdot b) \cdot c = a \cdot (b \cdot c) ∀ a , b , c ∈ A , ( a ⋅ b ) ⋅ c = a ⋅ ( b ⋅ c )
항등성 (identity element): ∃ a 0 s . t . ∀ a ∈ A , a 0 ⋅ a = a ⋅ a 0 = a \exist a_0 \; s.t. \; \forall a \in A, a_0 \cdot a = a \cdot a_0 = a ∃ a 0 s . t . ∀ a ∈ A , a 0 ⋅ a = a ⋅ a 0 = a
역(inverse): ∀ a ∈ A , ∃ a − 1 s . t . a ⋅ a − 1 = a 0 \forall a \in A, \exist a^{-1} \; s.t. \; a \cdot a^{-1} = a_0 ∀ a ∈ A , ∃ a − 1 s . t . a ⋅ a − 1 = a 0
여러 종류의 군이 존재할 수 있지만, SLAM에서 관심있는 군은 이전글 에서 소개되었던 회전행렬이 포함되는 SO군과 translation까지 포함된 SE군이다.
Lie 군은 위의 성질을 만족하는 것 중 일부 연속적인(매끄러운) 성질을 갖는 군이며, S O SO S O S E SE S E
2. 회전행렬에 대한 Lie Algebra
먼저 회전행렬로 이루어지는 S O ( 3 ) SO(3) S O ( 3 ) R \mathbf{R} R R R T = I \mathbf{R}\mathbf{R}^T=\mathbf{I} R R T = I R \mathbf{R} R
R ( t ) R ( t ) T = I \mathbf{R}(t)\mathbf{R}(t)^T=\mathbf{I} R ( t ) R ( t ) T = I 위의 식을 시간 t t t
R ˙ ( t ) R ( t ) T + R ( t ) R ˙ ( t ) T = 0 R ˙ ( t ) R ( t ) T = − R ( t ) R ˙ ( t ) T = − ( R ˙ ( t ) R ( t ) T ) T \dot{\mathbf{R}}(t)\mathbf{R}(t)^T +\mathbf{R}(t)\dot{\mathbf{R}}(t)^T = 0 \\ \dot{\mathbf{R}}(t)\mathbf{R}(t)^T = -\mathbf{R}(t)\dot{\mathbf{R}}(t)^T =-(\dot{\mathbf{R}}(t)\mathbf{R}(t)^T)^T R ˙ ( t ) R ( t ) T + R ( t ) R ˙ ( t ) T = 0 R ˙ ( t ) R ( t ) T = − R ( t ) R ˙ ( t ) T = − ( R ˙ ( t ) R ( t ) T ) T R ˙ ( t ) R ( t ) T = − ( R ˙ ( t ) R ( t ) T ) T \dot{\mathbf{R}}(t)\mathbf{R}(t)^T = -(\dot{\mathbf{R}}(t)\mathbf{R}(t)^T)^T R ˙ ( t ) R ( t ) T = − ( R ˙ ( t ) R ( t ) T ) T R ˙ ( t ) R ( t ) T \dot{\mathbf{R}}(t)\mathbf{R}(t)^T R ˙ ( t ) R ( t ) T skew-symmtric 행렬이라는 것을 알 수 있으며, a ∧ = R ˙ ( t ) R ( t ) T \mathbf{a}^\wedge=\dot{\mathbf{R}}(t)\mathbf{R}(t)^T a ∧ = R ˙ ( t ) R ( t ) T a \mathbf{a} a
a ∧ = R ˙ ( t ) R ( t ) T → R ˙ ( t ) = a ∧ R ( t ) → R ( t ) ≈ R ( t 0 ) + R ˙ ( t 0 ) ( t − t 0 ) = I + a ∧ t \begin{aligned} \mathbf{a}^\wedge=\dot{\mathbf{R}}(t)\mathbf{R}(t)^T \;\;\; \rightarrow \;\;\; \dot{\mathbf{R}}(t)=\mathbf{a}^\wedge\mathbf{R}(t) \;\;\; \rightarrow \;\;\; \mathbf{R}(t) & \approx \mathbf{R}(t_0)+\dot{\mathbf{R}}(t_0)(t-t_0)\\ & = \mathbf{I} + \mathbf{a}^\wedge t \end{aligned} a ∧ = R ˙ ( t ) R ( t ) T → R ˙ ( t ) = a ∧ R ( t ) → R ( t ) ≈ R ( t 0 ) + R ˙ ( t 0 ) ( t − t 0 ) = I + a ∧ t 이때 마지막 term에서는 t 0 = 0 t_0=0 t 0 = 0 R ( t 0 ) = I \mathbf{R}(t_0)=\mathbf{I} R ( t 0 ) = I a ∧ \mathbf{a}^\wedge a ∧ R ( t ) \mathbf{R}(t) R ( t ) a ∧ \mathbf{a}^\wedge a ∧ R ( t ) \mathbf{R}(t) R ( t ) a ∧ \mathbf{a}^\wedge a ∧ S O ( 3 ) SO(3) S O ( 3 ) a \mathbf{a} a
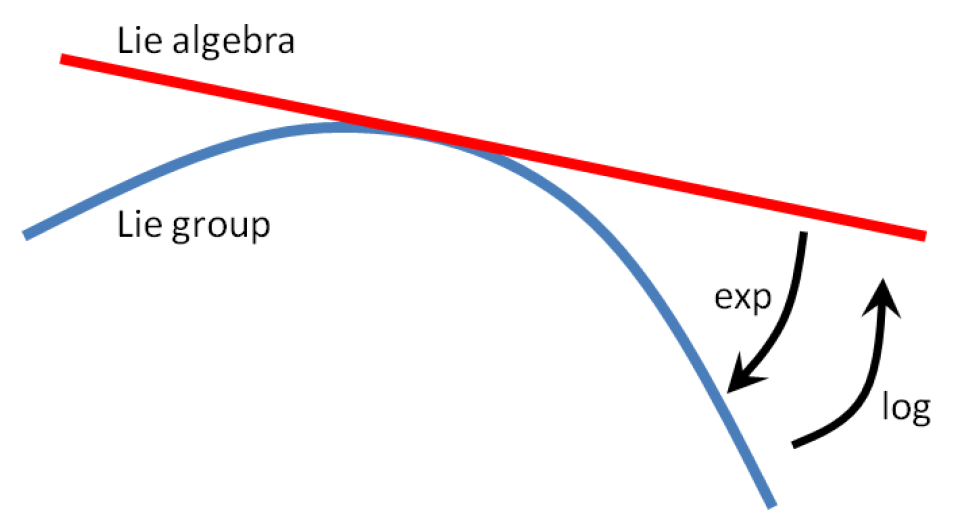
위 그림은 Lie 군과 그 접평면에 해당하는 Lie 대수의 관계를 보여주며, 서로 exponential과 logarithm 매핑을 통해 변환될 수 있음을 그리고 있다. 예를 들어 위에서 도출된 R ˙ ( t ) = a ^ R ( t ) \dot{\mathbf{R}}(t)=\hat{\mathbf{a}}\mathbf{R}(t) R ˙ ( t ) = a ^ R ( t )
R ( t ) = e a ^ t \mathbf{R}(t)= e^{\hat{\mathbf{a}}t} R ( t ) = e a ^ t 이것이 Lie 대수의 exponential 매핑이며, Lie 대수를 Lie 군으로 변환한다. 또한 양변에 로그를 취하면 Lie 군에서 Lie 대수로의 매핑을 구할 수 있으며, 이를 logarithm 매핑이라고 한다.
3. Lie Algebra의 특성
어떤 Lie 군에 대응되는 Lie algebra는 vector space V \mathcal{V} V F \mathcal{F} F [ ⋅ , ⋅ ] [\cdot, \cdot] [ ⋅ , ⋅ ]
Closure: [ X , Y ] ∈ V [\mathbf{X}, \mathbf{Y}] \in \mathcal{V} [ X , Y ] ∈ V
Bilinearity: [ a X + b Y , Z ] = a [ X , Z ] + b [ Y , Z ] [a\mathbf{X}+b\mathbf{Y}, \mathbf{Z}]=a[\mathbf{X}, \mathbf{Z}]+b[\mathbf{Y}, \mathbf{Z}] [ a X + b Y , Z ] = a [ X , Z ] + b [ Y , Z ] [ Z , a X + b Y ] = a [ Z , X ] + b [ Z , Y ] [\mathbf{Z}, a\mathbf{X}+b\mathbf{Y}]=a[\mathbf{Z}, \mathbf{X}] +b[\mathbf{Z}, \mathbf{Y}] [ Z , a X + b Y ] = a [ Z , X ] + b [ Z , Y ]
Alternating: [ X , X ] = 0 [\mathbf{X}, \mathbf{X}]=0 [ X , X ] = 0
Jacobi identity: [ X , [ Y , Z ] ] + [ Y , [ Z , X ] ] + [ Z , [ X , Y ] ] = 0 [\mathbf{X},[\mathbf{Y}, \mathbf{Z}]]+[\mathbf{Y},[\mathbf{Z},\mathbf{X}]]+[\mathbf{Z},[\mathbf{X}, \mathbf{Y}]]=0 [ X , [ Y , Z ] ] + [ Y , [ Z , X ] ] + [ Z , [ X , Y ] ] = 0
Lie 군(S O ( 3 ) , S E ( 3 ) SO(3), SE(3) S O ( 3 ) , S E ( 3 ) s o ( 3 ) , s e ( 3 ) so(3), se(3) s o ( 3 ) , s e ( 3 )
3.1. SO(3): Rotation
S O ( 3 ) SO(3) S O ( 3 )
Vector space: s o ( 3 ) = { Φ = ϕ ∧ ∈ R 3 × 3 ∣ ϕ ∈ R 3 } so(3)=\{ \mathbf{\Phi} = \mathbf{\phi}^\wedge \in \mathcal{R}^{3 \times 3} | \mathbf{\phi} \in \mathcal{R}^3 \} s o ( 3 ) = { Φ = ϕ ∧ ∈ R 3 × 3 ∣ ϕ ∈ R 3 }
Field: R \mathcal{R} R
Lie bracket: [ Φ 1 , Φ 2 ] = Φ 1 Φ 2 − Φ 2 Φ 1 [\mathbf{\Phi}_1, \mathbf{\Phi}_2] = \mathbf{\Phi}_1\mathbf{\Phi}_2-\mathbf{\Phi}_2\mathbf{\Phi}_1 [ Φ 1 , Φ 2 ] = Φ 1 Φ 2 − Φ 2 Φ 1
여기서 ϕ ∧ \mathbf{\phi}^\wedge ϕ ∧
ϕ ∧ = ( ϕ 1 ϕ 2 ϕ 3 ) ∧ = ( 0 − ϕ 3 ϕ 2 ϕ 3 0 ϕ 1 − ϕ 2 ϕ 1 0 ) ∈ R 3 × 3 , ϕ ∈ R 3 \mathbf{\phi}^\wedge = \begin{pmatrix} \mathbf{\phi}_1 \\ \mathbf{\phi}_2 \\ \mathbf{\phi}_3 \end{pmatrix}^\wedge = \begin{pmatrix} 0 & -\mathbf{\phi}_3 & \mathbf{\phi}_2\\ \mathbf{\phi}_3 & 0 & \mathbf{\phi}_1 \\ -\mathbf{\phi}_2 & \mathbf{\phi}_1 & 0 \end{pmatrix} \in \mathcal{R}^{3 \times 3}, \;\; \mathbf{\phi} \in \mathcal{R}^{3} ϕ ∧ = ⎝ ⎜ ⎛ ϕ 1 ϕ 2 ϕ 3 ⎠ ⎟ ⎞ ∧ = ⎝ ⎜ ⎛ 0 ϕ 3 − ϕ 2 − ϕ 3 0 ϕ 1 ϕ 2 ϕ 1 0 ⎠ ⎟ ⎞ ∈ R 3 × 3 , ϕ ∈ R 3 Skew-symmetric의 성질을 이용하면 위의 정의가 Lie 특성 네 가지를 만족함을 알 수 있다. 예를 들어 closure는 다음과 같다.
[ Φ 1 , Φ 2 ] = Φ 1 Φ 2 − Φ 2 Φ 1 = ϕ 1 ∧ ϕ 2 ∧ − ϕ 2 ∧ ϕ 1 ∧ = ( ϕ 1 ∧ ϕ 2 ∧ ) ∧ ∈ s o ( 3 ) [\mathbf{\Phi}_1, \mathbf{\Phi}_2] = \mathbf{\Phi}_1\mathbf{\Phi}_2-\mathbf{\Phi}_2\mathbf{\Phi}_1 = \mathbf{\phi}_1^\wedge\mathbf{\phi}_2^\wedge-\mathbf{\phi}_2^\wedge\mathbf{\phi}_1^\wedge=(\mathbf{\phi}_1^\wedge\mathbf{\phi}_2^\wedge)^\wedge \in so(3) [ Φ 1 , Φ 2 ] = Φ 1 Φ 2 − Φ 2 Φ 1 = ϕ 1 ∧ ϕ 2 ∧ − ϕ 2 ∧ ϕ 1 ∧ = ( ϕ 1 ∧ ϕ 2 ∧ ) ∧ ∈ s o ( 3 ) 여기서 ϕ 1 ∧ ϕ 2 ∧ ∈ R 3 \mathbf{\phi}_1^\wedge\mathbf{\phi}_2^\wedge \in \mathcal{R}^3 ϕ 1 ∧ ϕ 2 ∧ ∈ R 3 [ Φ , Φ ] = 0 [\mathbf{\Phi}, \mathbf{\Phi}]=0 [ Φ , Φ ] = 0
위에서도 보았듯이 ϕ \mathbf{\phi} ϕ
3.2. SE(3): Pose
S E ( 3 ) SE(3) S E ( 3 )
Vector space: s e ( 3 ) = { Ξ = ξ ∧ ∈ R 4 × 4 ∣ ξ ∈ R 6 } se(3)=\{ \mathbf{\Xi} = \mathbf{\xi}^\wedge \in \mathcal{R}^{4 \times 4} | \mathbf{\xi} \in \mathcal{R}^6 \} s e ( 3 ) = { Ξ = ξ ∧ ∈ R 4 × 4 ∣ ξ ∈ R 6 }
Field: R \mathcal{R} R
Lie bracket: [ Ξ 1 , Ξ 2 ] = Ξ 1 Ξ 2 − Ξ 2 Ξ 1 [\mathbf{\Xi}_1, \mathbf{\Xi}_2] = \mathbf{\Xi}_1\mathbf{\Xi}_2-\mathbf{\Xi}_2\mathbf{\Xi}_1 [ Ξ 1 , Ξ 2 ] = Ξ 1 Ξ 2 − Ξ 2 Ξ 1
ξ ∧ \mathbf{\xi}^\wedge ξ ∧ ∧ ^\wedge ∧ S O ( 3 ) SO(3) S O ( 3 )
ξ ∧ = ( ρ ϕ ) ∧ = ( ϕ ∧ ρ 0 T 0 ) ∈ R 4 × 4 , ρ , ϕ ∈ R 3 \mathbf{\xi}^\wedge = \begin{pmatrix} \mathbf{\rho} \\ \mathbf{\phi} \end{pmatrix}^\wedge = \begin{pmatrix} \mathbf{\phi}^\wedge & \mathbf{\rho} \\ \mathbf{0}^T & 0 \end{pmatrix} \in \mathcal{R}^{4 \times 4}, \;\; \mathbf{\rho}, \mathbf{\phi} \in \mathcal{R}^{3} ξ ∧ = ( ρ ϕ ) ∧ = ( ϕ ∧ 0 T ρ 0 ) ∈ R 4 × 4 , ρ , ϕ ∈ R 3 여기서 ϕ ∧ \mathbf{\phi}^\wedge ϕ ∧ R \mathbf{R} R ρ \mathbf{\rho} ρ ϕ \mathbf{\phi} ϕ
ϕ \phi ϕ ρ \rho ρ S O ( 3 ) SO(3) S O ( 3 ) T T − 1 = I \mathbf{T}\mathbf{T}^{-1}=\mathbf{I} T T − 1 = I T ˙ T − 1 = ξ ∧ \dot\mathbf{T}\mathbf{T}^{-1}=\mathbf{\xi}^\wedge T ˙ T − 1 = ξ ∧
T ˙ T − 1 = ( R ˙ t ˙ 0 0 ) ( R T − R T t 0 1 ) = ( R ˙ R T − R ˙ R T t + t ˙ 0 0 ) = ( ϕ ∧ ρ 0 T 0 ) ∈ R 4 × 4 \dot\mathbf{T}\mathbf{T}^{-1} = \begin{pmatrix} \dot\mathbf{R} & \dot\mathbf{t}\\ 0 & 0 \end{pmatrix} \begin{pmatrix} \mathbf{R}^T & -\mathbf{R}^T\mathbf{t}\\ 0 & 1 \end{pmatrix} = \begin{pmatrix} \dot\mathbf{R}\mathbf{R}^T & -\dot\mathbf{R}\mathbf{R}^T\mathbf{t} + \dot\mathbf{t}\\ 0 & 0 \end{pmatrix}= \begin{pmatrix} \mathbf{\phi}^\wedge & \mathbf{\rho} \\ \mathbf{0}^T & 0 \end{pmatrix} \in \mathcal{R}^{4 \times 4} T ˙ T − 1 = ( R ˙ 0 t ˙ 0 ) ( R T 0 − R T t 1 ) = ( R ˙ R T 0 − R ˙ R T t + t ˙ 0 ) = ( ϕ ∧ 0 T ρ 0 ) ∈ R 4 × 4 여기서 ρ = t ˙ − R ˙ R T t = t ˙ + ϕ ∧ ( − t ) \rho=\dot\mathbf{t}-\dot\mathbf{R}\mathbf{R}^T\mathbf{t}=\dot\mathbf{t}+\mathbf{\phi}^\wedge(-\mathbf{t}) ρ = t ˙ − R ˙ R T t = t ˙ + ϕ ∧ ( − t )
4. 지수 및 로그 매핑
이제 Lie 군과 Lie 대수를 서로 변환하는 exponential(지수 매핑, Lie 대수에서 Lie 군), logarithm(로그 매핑, Lie 군에서 Lie 대수) 매핑을 알아보자.
여기서 사용될 지수와 로그에 대한 Taylor 전개는 다음과 같다.
e x p ( A ) = I + A + 1 2 ! A 2 + 1 3 ! A 3 + ⋯ = ∑ n = 0 ∞ 1 n ! A n exp(\mathbf{A}) = \mathbf{I} + \mathbf{A} + \frac{1}{2!}\mathbf{A}^2 + \frac{1}{3!}\mathbf{A}^3 + \cdots = \sum_{n=0}^{\infin}{\frac{1}{n!}\mathbf{A}^n} e x p ( A ) = I + A + 2 ! 1 A 2 + 3 ! 1 A 3 + ⋯ = n = 0 ∑ ∞ n ! 1 A n ln ( A ) = ∑ n = 1 ∞ ( − 1 ) n − 1 n ( A − 1 ) n \ln(\mathbf{A}) = \sum_{n=1}^{\infin}{\frac{(-1)^{n-1}}{n}(\mathbf{A}-1)^n} ln ( A ) = n = 1 ∑ ∞ n ( − 1 ) n − 1 ( A − 1 ) n 4.1. SO(3): Rotation
S O ( 3 ) SO(3) S O ( 3 ) s o ( 3 ) → S O ( 3 ) so(3) \rightarrow SO(3) s o ( 3 ) → S O ( 3 ) e e e
Lie 대수 ϕ ∧ \mathbf{\phi}^{\wedge} ϕ ∧ ϕ = ∣ ϕ ∣ a \mathbf{\phi}=|\mathbf{\phi}|\mathbf{a} ϕ = ∣ ϕ ∣ a a \mathbf{a} a ϕ ∧ = ∣ ϕ ∣ a ∧ \mathbf{\phi}^{\wedge}=|\mathbf{\phi}|\mathbf{a}^{\wedge} ϕ ∧ = ∣ ϕ ∣ a ∧
e x p ( ϕ ∧ ) = e x p ( ∣ ϕ ∣ a ∧ ) = I ⏟ a a T − a ∧ a ∧ + ∣ ϕ ∣ a ∧ + 1 2 ! ∣ ϕ ∣ 2 a ∧ a ∧ + 1 3 ! ∣ ϕ ∣ 3 a ∧ a ∧ a ∧ ⏟ − a ∧ + 1 4 ! ∣ ϕ ∣ 3 a ∧ a ∧ a ∧ a ∧ ⏟ − a ∧ a ∧ + ⋯ = a a T + ( ∣ ϕ ∣ − 1 3 ! ∣ ϕ ∣ 3 + 1 5 ! ∣ ϕ ∣ 5 − ⋯ ) ⏟ sin ∣ ϕ ∣ a ∧ − ( 1 − 1 2 ! ∣ ϕ ∣ 2 + 1 4 ! ∣ ϕ ∣ 4 − ⋯ ) ⏟ cos ∣ ϕ ∣ a ∧ a ∧ ⏟ − I + a a T = cos ∣ ϕ ∣ I + ( 1 − cos ∣ ϕ ∣ ) a a T + sin ∣ ϕ ∣ a ∧ = C \begin{aligned} exp(\mathbf{\phi}^{\wedge}) & = exp(|\mathbf{\phi}|\mathbf{a}^{\wedge}) \\ & = \underbrace{\mathbf{I}}_{\mathbf{a}\mathbf{a}^T-\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}} + |\mathbf{\phi}|\mathbf{a}^{\wedge} + \frac{1}{2!}|\mathbf{\phi}|^2\mathbf{a}^{\wedge}\mathbf{a}^{\wedge} + \frac{1}{3!}|\mathbf{\phi}|^3\underbrace{\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}}_{-\mathbf{a}^{\wedge}} + \frac{1}{4!}|\mathbf{\phi}|^3\underbrace{\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}}_{-\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}} + \cdots \\ & = \mathbf{a}\mathbf{a}^T + \underbrace{\left( |\mathbf{\phi}| - \frac{1}{3!}|\mathbf{\phi}|^3 + \frac{1}{5!}|\mathbf{\phi}|^5 - \cdots \right)}_{\sin|\mathbf{\phi}|} \mathbf{a}^{\wedge} - \underbrace{\left( 1 - \frac{1}{2!}|\mathbf{\phi}|^2 + \frac{1}{4!}|\mathbf{\phi}|^4 - \cdots \right)}_{\cos|\mathbf{\phi}|} \underbrace{\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}}_{-\mathbf{I} + \mathbf{a}\mathbf{a}^T} \\ & = \cos|\mathbf{\phi}| \mathbf{I} + (1-\cos|\mathbf{\phi}|)\mathbf{a}\mathbf{a}^T + \sin|\mathbf{\phi}|\mathbf{a}^{\wedge} \\ & = \mathbf{C} \end{aligned} e x p ( ϕ ∧ ) = e x p ( ∣ ϕ ∣ a ∧ ) = a a T − a ∧ a ∧ I + ∣ ϕ ∣ a ∧ + 2 ! 1 ∣ ϕ ∣ 2 a ∧ a ∧ + 3 ! 1 ∣ ϕ ∣ 3 − a ∧ a ∧ a ∧ a ∧ + 4 ! 1 ∣ ϕ ∣ 3 − a ∧ a ∧ a ∧ a ∧ a ∧ a ∧ + ⋯ = a a T + s i n ∣ ϕ ∣ ( ∣ ϕ ∣ − 3 ! 1 ∣ ϕ ∣ 3 + 5 ! 1 ∣ ϕ ∣ 5 − ⋯ ) a ∧ − c o s ∣ ϕ ∣ ( 1 − 2 ! 1 ∣ ϕ ∣ 2 + 4 ! 1 ∣ ϕ ∣ 4 − ⋯ ) − I + a a T a ∧ a ∧ = cos ∣ ϕ ∣ I + ( 1 − cos ∣ ϕ ∣ ) a a T + sin ∣ ϕ ∣ a ∧ = C Taylor 전개를 정리하는 과정에서 a ∧ a ∧ = − I + a a T \mathbf{a}^{\wedge}\mathbf{a}^{\wedge} = -\mathbf{I} + \mathbf{a}\mathbf{a}^T a ∧ a ∧ = − I + a a T a ∧ a ∧ a ∧ = − a ∧ \mathbf{a}^{\wedge}\mathbf{a}^{\wedge}\mathbf{a}^{\wedge}=-\mathbf{a}^{\wedge} a ∧ a ∧ a ∧ = − a ∧
위의 결과식은 로드리게스 식과 일치하며, 즉, e x p ( ϕ ∧ ) = e x p ( ∣ ϕ ∣ a ∧ ) exp(\mathbf{\phi}^{\wedge}) = exp(|\mathbf{\phi}|\mathbf{a}^{\wedge}) e x p ( ϕ ∧ ) = e x p ( ∣ ϕ ∣ a ∧ ) a \mathbf{a} a ∣ ϕ ∣ |\mathbf{\phi}| ∣ ϕ ∣ ϕ ∧ \mathbf{\phi}^{\wedge} ϕ ∧ S O ( 3 ) SO(3) S O ( 3 )
추가적으로 회전행렬을 C \mathbf{C} C ϕ ∧ \mathbf{\phi}^{\wedge} ϕ ∧ ∨ ^\vee ∨ ∧ ^\wedge ∧
ϕ = ln ( C ) ∨ \mathbf{\phi} = \ln(\mathbf{C})^{\vee} ϕ = ln ( C ) ∨ 하지만 이전 글 에서 회전행렬을 이용해 회전축과 각도를 구하는 방법을 유도하였기 때문에 굳이 지수 매핑처럼 Taylor 전개를 수행할 필요는 없다. 회전축 a \mathbf{a} a C \mathbf{C} C
∣ ϕ ∣ = cos − 1 ( t r ( C ) − 1 2 ) + 2 π m |\mathbf{\phi}| = \cos^{-1}{\left( \frac{tr(\mathbf{C})-1}{2} \right)} + 2 \pi m ∣ ϕ ∣ = cos − 1 ( 2 t r ( C ) − 1 ) + 2 π m C = e x p ( ( ∣ ϕ ∣ + 2 π m ) a ∧ ) \mathbf{C} = exp((|\mathbf{\phi}|+2 \pi m)\mathbf{a}^\wedge) C = e x p ( ( ∣ ϕ ∣ + 2 π m ) a ∧ ) 뒤에 2 π m 2 \pi m 2 π m 0 0 0 2 π 2\pi 2 π
이렇게 구한 회전 행렬은 S O ( 3 ) SO(3) S O ( 3 ) d e t ( C ) = d e t ( e x p ( ϕ ∧ ) ) = e x p ( t r ( ϕ ∧ ) ) = e x p ( 0 ) = 1 det(\mathbf{C})=det(exp(\phi^\wedge))=exp(tr(\phi^\wedge))=exp(0)=1 d e t ( C ) = d e t ( e x p ( ϕ ∧ ) ) = e x p ( t r ( ϕ ∧ ) ) = e x p ( 0 ) = 1 S O ( 3 ) SO(3) S O ( 3 )
4.2. SE(3): Pose
Pose를 나타내는 S E ( 3 ) SE(3) S E ( 3 ) s e ( 3 ) → S E ( 3 ) se(3) \rightarrow SE(3) s e ( 3 ) → S E ( 3 ) S E ( 3 ) → s e ( 3 ) SE(3) \rightarrow se(3) S E ( 3 ) → s e ( 3 ) s e ( 3 ) se(3) s e ( 3 )
e x p ( ξ ∧ ) = ∑ n = 0 ∞ 1 n ! ( ξ ∧ ) n = ∑ n = 0 ∞ 1 n ! ( ( ρ ϕ ) ∧ ) n = ∑ n = 0 ∞ 1 n ! ( ϕ ∧ ρ 0 T 0 ) n = ( ∑ n = 0 ∞ 1 n ! ( ϕ ∧ ) n ( ∑ n = 0 ∞ 1 ( n + 1 ) ! ( ϕ ∧ ) n ) ρ 0 T 1 ) = ( C r 0 T 1 ) ∈ S E ( 3 ) \begin{aligned} exp(\xi^\wedge) & = \sum_{n=0}^{\infin}{\frac{1}{n!}(\xi^\wedge)^n} \\ & = \sum_{n=0}^{\infin}{\frac{1}{n!}( \begin{pmatrix} \rho\\ \phi \end{pmatrix}^\wedge )^n} \\ & = \sum_{n=0}^{\infin}\frac{1}{n!} \begin{pmatrix} \phi^\wedge & \rho\\ \mathbf{0}^T & 0 \end{pmatrix}^n \\ & = \begin{pmatrix} \sum_{n=0}^{\infin}\frac{1}{n!}(\phi^\wedge)^n & (\sum_{n=0}^{\infin}\frac{1}{(n+1)!}(\phi^\wedge)^n)\rho\\ \mathbf{0}^T & 1 \end{pmatrix} \\ & = \begin{pmatrix} \mathbf{C} & \mathbf{r}\\ \mathbf{0}^T & 1 \end{pmatrix} \in SE(3) \end{aligned} e x p ( ξ ∧ ) = n = 0 ∑ ∞ n ! 1 ( ξ ∧ ) n = n = 0 ∑ ∞ n ! 1 ( ( ρ ϕ ) ∧ ) n = n = 0 ∑ ∞ n ! 1 ( ϕ ∧ 0 T ρ 0 ) n = ( ∑ n = 0 ∞ n ! 1 ( ϕ ∧ ) n 0 T ( ∑ n = 0 ∞ ( n + 1 ) ! 1 ( ϕ ∧ ) n ) ρ 1 ) = ( C 0 T r 1 ) ∈ S E ( 3 ) 여기서 r , J \mathbf{r}, \mathbf{J} r , J
r = J ρ ∈ R , J = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( ϕ ∧ ) n \mathbf{r} = \mathbf{J}\rho \in \mathcal{R}, \;\;\;\;\;\; \mathbf{J}=\sum_{n=0}^{\infin}\frac{1}{(n+1)!}(\phi^\wedge)^n r = J ρ ∈ R , J = n = 0 ∑ ∞ ( n + 1 ) ! 1 ( ϕ ∧ ) n 앞에서 이미 C ↔ ϕ ∧ \mathbf{C} \leftrightarrow \phi^\wedge C ↔ ϕ ∧ r ↔ ρ \mathbf{r} \leftrightarrow \rho r ↔ ρ r = J ρ \mathbf{r}=\mathbf{J}\rho r = J ρ ρ = J − 1 r \rho=\mathbf{J}^{-1}\mathbf{r} ρ = J − 1 r
J \mathbf{J} J
J = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( ϕ ∧ ) n = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( ∣ ϕ ∣ a ∧ ) n = I + 1 2 ! ∣ ϕ ∣ a ∧ + 1 3 ! ( ∣ ϕ ∣ a ∧ ) 2 + ⋯ = I + 1 ∣ ϕ ∣ ( 1 2 ! ∣ ϕ ∣ 2 − 1 4 ! ∣ ϕ ∣ 4 + ⋯ ) ( a ∧ ) + 1 ∣ ϕ ∣ ( 1 3 ! ∣ ϕ ∣ 3 − 1 5 ! ∣ ϕ ∣ 5 + ⋯ ) ( a ∧ ) 2 = I + 1 ∣ ϕ ∣ ( 1 − cos ∣ ϕ ∣ ) ( a ∧ ) + 1 ∣ ϕ ∣ ( ∣ ϕ ∣ − sin ∣ ϕ ∣ ) ( a a T + I ) = sin ∣ ϕ ∣ ∣ ϕ ∣ I + ( 1 − sin ∣ ϕ ∣ ∣ ϕ ∣ ) a a T + 1 − cos ∣ ϕ ∣ ∣ ϕ ∣ a ∧ \begin{aligned} \mathbf{J} & = \sum_{n=0}^{\infin}\frac{1}{(n+1)!}(\phi^\wedge)^n = \sum_{n=0}^{\infin}\frac{1}{(n+1)!}(|\mathbf{\phi}|\mathbf{a}^{\wedge})^n \\ & = \mathbf{I} + \frac{1}{2!}|\mathbf{\phi}|\mathbf{a}^{\wedge} + \frac{1}{3!}(|\mathbf{\phi}|\mathbf{a}^{\wedge})^2 + \cdots \\ & = \mathbf{I} + \frac{1}{|\mathbf{\phi}|}\left(\frac{1}{2!}|\mathbf{\phi}|^2 -\frac{1}{4!}|\mathbf{\phi}|^4 + \cdots \right)(\mathbf{a}^{\wedge}) + \frac{1}{|\mathbf{\phi}|}\left(\frac{1}{3!}|\mathbf{\phi}|^3 -\frac{1}{5!}|\mathbf{\phi}|^5 + \cdots \right)(\mathbf{a}^{\wedge})^2 \\ & = \mathbf{I} + \frac{1}{|\mathbf{\phi}|}(1-\cos|\phi|)(\mathbf{a}^{\wedge}) + \frac{1}{|\mathbf{\phi}|}(|\phi|-\sin|\phi|)(\mathbf{a}\mathbf{a}^T + \mathbf{I}) \\ & = \frac{\sin|\phi|}{|\mathbf{\phi}|}\mathbf{I} + \left(1-\frac{\sin|\phi|}{|\mathbf{\phi}|} \right)\mathbf{a}\mathbf{a}^T+\frac{1-\cos|\phi|}{|\phi|}\mathbf{a}^\wedge \end{aligned} J = n = 0 ∑ ∞ ( n + 1 ) ! 1 ( ϕ ∧ ) n = n = 0 ∑ ∞ ( n + 1 ) ! 1 ( ∣ ϕ ∣ a ∧ ) n = I + 2 ! 1 ∣ ϕ ∣ a ∧ + 3 ! 1 ( ∣ ϕ ∣ a ∧ ) 2 + ⋯ = I + ∣ ϕ ∣ 1 ( 2 ! 1 ∣ ϕ ∣ 2 − 4 ! 1 ∣ ϕ ∣ 4 + ⋯ ) ( a ∧ ) + ∣ ϕ ∣ 1 ( 3 ! 1 ∣ ϕ ∣ 3 − 5 ! 1 ∣ ϕ ∣ 5 + ⋯ ) ( a ∧ ) 2 = I + ∣ ϕ ∣ 1 ( 1 − cos ∣ ϕ ∣ ) ( a ∧ ) + ∣ ϕ ∣ 1 ( ∣ ϕ ∣ − sin ∣ ϕ ∣ ) ( a a T + I ) = ∣ ϕ ∣ sin ∣ ϕ ∣ I + ( 1 − ∣ ϕ ∣ sin ∣ ϕ ∣ ) a a T + ∣ ϕ ∣ 1 − cos ∣ ϕ ∣ a ∧ 위의 식은 로드리게스 식과 비슷하지만 일치하지는 않는 것에 주의해야한다. 위의 식을 이용하면 J − 1 \mathbf{J}^{-1} J − 1
J − 1 = ∣ ϕ ∣ 2 cot ∣ ϕ ∣ 2 I + ( 1 − ∣ ϕ ∣ 2 cot ∣ ϕ ∣ 2 ) a a T − ∣ ϕ ∣ 2 a ∧ \mathbf{J}^{-1} = \frac{|\phi|}{2}\cot\frac{|\phi|}{2}\mathbf{I} +\left( 1-\frac{|\phi|}{2}\cot\frac{|\phi|}{2} \right)\mathbf{a}\mathbf{a}^T -\frac{|\phi|}{2}\mathbf{a}^\wedge J − 1 = 2 ∣ ϕ ∣ cot 2 ∣ ϕ ∣ I + ( 1 − 2 ∣ ϕ ∣ cot 2 ∣ ϕ ∣ ) a a T − 2 ∣ ϕ ∣ a ∧ 추가적으로 J \mathbf{J} J
J J T = γ I + ( 1 − γ ) a a T \mathbf{J}\mathbf{J}^T = \gamma\mathbf{I}+(1-\gamma)\mathbf{a}\mathbf{a}^T J J T = γ I + ( 1 − γ ) a a T ( J J T ) − 1 = 1 γ I + ( 1 − 1 γ ) a a T (\mathbf{J}\mathbf{J}^T)^{-1} = \frac{1}{\gamma}\mathbf{I} + \left( 1- \frac{1}{\gamma} \right)\mathbf{a}\mathbf{a}^T ( J J T ) − 1 = γ 1 I + ( 1 − γ 1 ) a a T γ = 2 1 − cos ∣ ϕ ∣ ∣ ϕ ∣ 2 \gamma = 2\frac{1-\cos|\phi|}{|\phi|^2} γ = 2 ∣ ϕ ∣ 2 1 − cos ∣ ϕ ∣ 이때, J J T \mathbf{J}\mathbf{J}^T J J T ∣ ϕ ∣ = 0 |\phi|=0 ∣ ϕ ∣ = 0 J J T = I \mathbf{J}\mathbf{J}^T=\mathbf{I} J J T = I ∣ ϕ ∣ ≠ 0 |\phi|\ne 0 ∣ ϕ ∣ = 0
x T J J T x = x T ( γ I + ( 1 − γ ) a a T ) x = x T ( a a T − γ a ∧ a ∧ ) x = x T a a T x + γ ( a ∧ x ) T ( a ∧ x ) = ( a T x ) T ( a T x ) ⏟ ≥ 0 + 2 1 − cos ∣ ϕ ∣ ϕ 2 ⏟ > 0 ( a ∧ x ) T ( a ∧ x ) ⏟ ≥ 0 > 0 \begin{aligned} \mathbf{x}^T\mathbf{J}\mathbf{J}^T\mathbf{x} & = \mathbf{x}^T(\gamma\mathbf{I}+(1-\gamma)\mathbf{a}\mathbf{a}^T)\mathbf{x} \\ & = \mathbf{x}^T(\mathbf{a}\mathbf{a}^T-\gamma\mathbf{a}^\wedge\mathbf{a}^\wedge)\mathbf{x} \\ & = \mathbf{x}^T\mathbf{a}\mathbf{a}^T\mathbf{x} + \gamma(\mathbf{a}^\wedge\mathbf{x})^T(\mathbf{a}^\wedge\mathbf{x}) \\ & = \underbrace{(\mathbf{a}^T\mathbf{x})^T(\mathbf{a}^T\mathbf{x})}_{\ge0} +\underbrace{2\frac{1-\cos|\phi|}{\phi^2}}_{>0}\underbrace{(\mathbf{a}^\wedge\mathbf{x})^T(\mathbf{a}^\wedge\mathbf{x})}_{\ge0}>0 \end{aligned} x T J J T x = x T ( γ I + ( 1 − γ ) a a T ) x = x T ( a a T − γ a ∧ a ∧ ) x = x T a a T x + γ ( a ∧ x ) T ( a ∧ x ) = ≥ 0 ( a T x ) T ( a T x ) + > 0 2 ϕ 2 1 − cos ∣ ϕ ∣ ≥ 0 ( a ∧ x ) T ( a ∧ x ) > 0 여기서 ( a T x ) T ( a T x ) (\mathbf{a}^T\mathbf{x})^T(\mathbf{a}^T\mathbf{x}) ( a T x ) T ( a T x ) a , x \mathbf{a},\mathbf{x} a , x
그리고 J \mathbf{J} J C \mathbf{C} C
J = ∫ 0 1 C α d α = ∫ 0 1 e x p ( ϕ ∧ ) α d α = ∫ 0 1 e x p ( α ϕ ∧ ) d α = ∫ 0 1 ( ∑ n = 0 ∞ 1 n ! α n ( ϕ ∧ ) n ) d α = ∑ n = 0 ∞ 1 n ! ( ∫ 0 1 α n d α ) ( ϕ ∧ ) n = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( ϕ ∧ ) n \begin{aligned} \mathbf{J} & = \int_{0}^{1}{\mathbf{C}^\alpha}d\alpha \\ & = \int_{0}^{1}{exp(\phi^\wedge)^\alpha}d\alpha = \int_{0}^{1}{exp(\alpha\phi^\wedge)}d\alpha \\ & = \int_{0}^{1}{\left( \sum_{n=0}^{\infin}{\frac{1}{n!}\alpha^n(\phi^\wedge)^n} \right) d\alpha} = \sum_{n=0}^{\infin}{\frac{1}{n!}}\left(\int_{0}^{1}{ \alpha^n d\alpha}\right)(\phi^\wedge)^n \\ & = \sum_{n=0}^{\infin}\frac{1}{(n+1)!}(\phi^\wedge)^n \end{aligned} J = ∫ 0 1 C α d α = ∫ 0 1 e x p ( ϕ ∧ ) α d α = ∫ 0 1 e x p ( α ϕ ∧ ) d α = ∫ 0 1 ( n = 0 ∑ ∞ n ! 1 α n ( ϕ ∧ ) n ) d α = n = 0 ∑ ∞ n ! 1 ( ∫ 0 1 α n d α ) ( ϕ ∧ ) n = n = 0 ∑ ∞ ( n + 1 ) ! 1 ( ϕ ∧ ) n C = I + ϕ ∧ J \mathbf{C} = \mathbf{I} + \phi^\wedge\mathbf{J} C = I + ϕ ∧ J 특히 여기서 사용된 J \mathbf{J} J S O ( 3 ) SO(3) S O ( 3 )
s e ( 3 ) se(3) s e ( 3 )
5. 미분
일반적인 스칼라 값에 대해서 지수 계산는 e x p ( a ) e x p ( b ) = e x p ( a + b ) exp(a)exp(b)=exp(a+b) e x p ( a ) e x p ( b ) = e x p ( a + b )
ln ( e x p ( A ) e x p ( B ) ) = ∑ n = 1 ∞ ( − 1 ) n − 1 n ∑ r i + s i > 0 , 1 ≤ i ≤ n ∑ i = 0 n ( r i + s i ) − 1 Π i = 1 n r i ! s i ! [ A r 1 B s 1 ⋯ A r n B s n ] \ln(exp(\mathbf{A})exp(\mathbf{B})) = \sum_{n=1}^{\infin}\frac{(-1)^{n-1}}{n}\sum_{r_i+s_i \gt 0, \; 1\le i\le n} \frac{\sum^n_{i=0}(r_i+s_i)^{-1}}{\Pi^{n}_{i=1}r_i!s_i!}[\mathbf{A}^{r_1}\mathbf{B}^{s_1}\cdots \mathbf{A}^{r_n}\mathbf{B}^{s_n}] ln ( e x p ( A ) e x p ( B ) ) = n = 1 ∑ ∞ n ( − 1 ) n − 1 r i + s i > 0 , 1 ≤ i ≤ n ∑ Π i = 1 n r i ! s i ! ∑ i = 0 n ( r i + s i ) − 1 [ A r 1 B s 1 ⋯ A r n B s n ] 위에서 사용된 [ ⋅ , ⋅ ] [\cdot,\cdot] [ ⋅ , ⋅ ]
5.1. SO(3): Rotation
위의 BCH식을 이용하여 C 1 = e x p ( ϕ 1 ∧ ) , C 2 = e x p ( ϕ 2 ∧ ) \mathbf{C_1}=exp(\phi_1^\wedge), \mathbf{C_2}=exp(\phi_2^\wedge) C 1 = e x p ( ϕ 1 ∧ ) , C 2 = e x p ( ϕ 2 ∧ ) S O ( 3 ) SO(3) S O ( 3 )
ln ( C 1 C 2 ) ∨ = ln ( e x p ( ϕ 1 ∧ ) e x p ( ϕ 2 ∧ ) ) ∨ ≈ { J l ( ϕ 2 ) − 1 ϕ 1 + ϕ 2 ⋯ ϕ 1 이 작은 경우 ϕ 1 + J r ( ϕ 1 ) − 1 ϕ 2 ⋯ ϕ 2 이 작은 경우 \ln(\mathbf{C_1}\mathbf{C_2})^\vee = \ln(exp(\phi_1^\wedge)exp(\phi_2^\wedge))^\vee \approx \begin{cases} \mathbf{J}_l(\phi_2)^{-1}\phi_1 + \phi_2 \;\;\;\;\;\; \cdots \;\;\text{$\phi_1$이 작은 경우} \\ \phi_1 + \mathbf{J}_r(\phi_1)^{-1}\phi_2 \;\;\;\;\;\; \cdots \;\;\text{$\phi_2$이 작은 경우} \end{cases} ln ( C 1 C 2 ) ∨ = ln ( e x p ( ϕ 1 ∧ ) e x p ( ϕ 2 ∧ ) ) ∨ ≈ { J l ( ϕ 2 ) − 1 ϕ 1 + ϕ 2 ⋯ ϕ 1 이 작은 경우 ϕ 1 + J r ( ϕ 1 ) − 1 ϕ 2 ⋯ ϕ 2 이 작은 경우 여기서 J l \mathbf{J}_l J l J r \mathbf{J}_r J r C 2 \mathbf{C_2} C 2 C 1 \mathbf{C_1} C 1 J l ( ϕ 2 ) ϕ 1 + ϕ 2 \mathbf{J}_l(\phi_2)\phi_1 + \phi_2 J l ( ϕ 2 ) ϕ 1 + ϕ 2 C 2 \mathbf{C_2} C 2 ϕ 2 \phi_2 ϕ 2 J l ( ϕ 2 ) ϕ 1 \mathbf{J}_l(\phi_2)\phi_1 J l ( ϕ 2 ) ϕ 1 J l \mathbf{J}_l J l J r ( ϕ ) = J l ( − ϕ ) \mathbf{J}_r(\phi)=\mathbf{J}_l(-\phi) J r ( ϕ ) = J l ( − ϕ ) J l ( ϕ ) = C J r ( ϕ ) \mathbf{J}_l(\phi)=\mathbf{C}\mathbf{J}_r(\phi) J l ( ϕ ) = C J r ( ϕ ) C = e x p ( ϕ ∧ ) \mathbf{C}=exp(\phi^\wedge) C = e x p ( ϕ ∧ )
케이스가 두 가지로 구분되므로, 미소 변화가 왼쪽에 곱해지는지, 오른쪽에 곱해지는지 구분하여 사용하여야 한다. 최적화 등의 문제를 Lie 대수를 통해 해결할 경우 Lie 대수에 직접 미소 변화가 더해지거나, 아니면 Lie 군에서 미소 변화가 곱해지는 경우가 있다(S O ( 3 ) SO(3) S O ( 3 )
e x p ( Δ ϕ ∧ ) e x p ( ϕ ∧ ) = e x p ( J l ( ϕ ) − 1 Δ ϕ + ϕ ) exp(\Delta\phi^\wedge)exp(\phi^\wedge) = exp(\mathbf{J}_l(\phi)^{-1}\Delta\phi + \phi) e x p ( Δ ϕ ∧ ) e x p ( ϕ ∧ ) = e x p ( J l ( ϕ ) − 1 Δ ϕ + ϕ ) e x p ( ( ϕ + Δ ϕ ) ∧ ) = e x p ( ( J l ( ϕ ) − 1 Δ ϕ ) ∧ ) e x p ( ϕ ∧ ) = e x p ( ϕ ∧ ) e x p ( ( J r ( ϕ ) − 1 Δ ϕ ) ∧ ) exp((\phi+\Delta\phi)^\wedge) = exp((\mathbf{J}_l(\phi)^{-1}\Delta\phi)^\wedge)exp(\phi^\wedge) = exp(\phi^\wedge)exp((\mathbf{J}_r(\phi)^{-1}\Delta\phi)^\wedge) e x p ( ( ϕ + Δ ϕ ) ∧ ) = e x p ( ( J l ( ϕ ) − 1 Δ ϕ ) ∧ ) e x p ( ϕ ∧ ) = e x p ( ϕ ∧ ) e x p ( ( J r ( ϕ ) − 1 Δ ϕ ) ∧ ) 이제 위의 결과를 이용하여 S O ( 3 ) SO(3) S O ( 3 ) s o ( 3 ) so(3) s o ( 3 ) C v \mathbf{C}\mathbf{v} C v ϕ \phi ϕ l \mathbf{l} l ϕ \phi ϕ
∂ C v ∂ ϕ = lim h → 0 e x p ( ( ϕ + h l ) ∧ ) v − e x p ( ϕ ∧ ) v h ≈ lim h → 0 e x p ( ( J h l ) ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v h ⋯ B H C 근사 ≈ lim h → 0 ( I + h ( J l ) ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v h ⋯ T a y l o r 전개 = ( J l ) ∧ e x p ( ϕ ∧ ) v = ( J l ) ∧ C v = − ( C v ) ∧ J \begin{aligned} \frac{\partial \mathbf{C}\mathbf{v}}{\partial \phi} & = \lim_{h \rightarrow 0}{\frac{exp((\phi+h\mathbf{l})^\wedge)\mathbf{v}-exp(\phi^\wedge)\mathbf{v}}{h}} \\ & \approx \lim_{h \rightarrow 0}{\frac{exp((\mathbf{J}h\mathbf{l})^\wedge)exp(\phi^\wedge)\mathbf{v}-exp(\phi^\wedge)\mathbf{v}}{h}} \;\;\;\;\;\;\;\; \cdots \;\;BHC근사 \\ & \approx \lim_{h \rightarrow 0}{\frac{(\mathbf{I}+h(\mathbf{J}\mathbf{l})^\wedge)exp(\phi^\wedge)\mathbf{v}-exp(\phi^\wedge)\mathbf{v}}{h}} \;\;\;\;\;\;\;\; \cdots \;\;Taylor 전개 \\ & = (\mathbf{J}\mathbf{l})^\wedge exp(\phi^\wedge)\mathbf{v} \\ & = (\mathbf{J}\mathbf{l})^\wedge \mathbf{C}\mathbf{v} \\ & = -(\mathbf{C}\mathbf{v})^\wedge\mathbf{J} \end{aligned} ∂ ϕ ∂ C v = h → 0 lim h e x p ( ( ϕ + h l ) ∧ ) v − e x p ( ϕ ∧ ) v ≈ h → 0 lim h e x p ( ( J h l ) ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v ⋯ B H C 근 사 ≈ h → 0 lim h ( I + h ( J l ) ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v ⋯ T a y l o r 전 개 = ( J l ) ∧ e x p ( ϕ ∧ ) v = ( J l ) ∧ C v = − ( C v ) ∧ J 만약 C v \mathbf{C}\mathbf{v} C v u ( x ) u(\mathbf{x}) u ( x ) x = C v \mathbf{x}=\mathbf{C}\mathbf{v} x = C v
∂ u ∂ ϕ = ∂ u ∂ x ∂ x ∂ ϕ = − ∂ u ∂ x ( C v ) ∧ J \frac{\partial u}{\partial \phi} = \frac{\partial u}{\partial \mathbf{x}} \frac{\partial \mathbf{x}}{\partial \phi} = -\frac{\partial u}{\partial \mathbf{x}}(\mathbf{C}\mathbf{v})^\wedge\mathbf{J} ∂ ϕ ∂ u = ∂ x ∂ u ∂ ϕ ∂ x = − ∂ x ∂ u ( C v ) ∧ J Gradient descent 기반 최적화에서 linearization한 지점이 C o p = e x p ( ϕ o p ∧ ) \mathbf{C}_{op}=exp(\phi_{op}^\wedge) C o p = e x p ( ϕ o p ∧ )
ϕ = ϕ o p − α J T ( C o p v ) ∧ ∂ u ∂ x \phi = \phi_{op}-\alpha \mathbf{J}^T (\mathbf{C}_{op}\mathbf{v})^\wedge \frac{\partial u}{\partial \mathbf{x}} ϕ = ϕ o p − α J T ( C o p v ) ∧ ∂ x ∂ u 하지만 여기서 Jacobian J \mathbf{J} J
이러한 문제를 해결하는 방법으로, 미소 회전 Δ C = e x p ( ψ ∧ ) \Delta \mathbf{C}=exp(\psi^\wedge) Δ C = e x p ( ψ ∧ ) ψ \psi ψ
∂ C v ∂ ψ = lim ψ → 0 e x p ( ψ ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v ψ ≈ lim ψ → 0 ( I − ψ ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v ψ = lim ψ → 0 ψ ∧ C ψ ψ = lim ψ → 0 − ( C ψ ) ∧ ψ ψ = − ( C ψ ) ∧ \begin{aligned} \frac{\partial \mathbf{C}\mathbf{v}}{\partial \psi} & = \lim_{\psi \rightarrow 0}{\frac{exp(\psi^\wedge)exp(\phi^\wedge)\mathbf{v}-exp(\phi^\wedge)\mathbf{v}}{\psi}} \\ & \approx \lim_{\psi \rightarrow 0}{\frac{(\mathbf{I}-\psi^\wedge)exp(\phi^\wedge)\mathbf{v}-exp(\phi^\wedge)\mathbf{v}}{\psi}} \\ & = \lim_{\psi \rightarrow 0}{\frac{\psi^\wedge \mathbf{C} \psi}{\psi}} \\ & = \lim_{\psi \rightarrow 0}{\frac{-(\mathbf{C} \psi)^\wedge \psi}{\psi}} \\ & = -(\mathbf{C} \psi)^\wedge \end{aligned} ∂ ψ ∂ C v = ψ → 0 lim ψ e x p ( ψ ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v ≈ ψ → 0 lim ψ ( I − ψ ∧ ) e x p ( ϕ ∧ ) v − e x p ( ϕ ∧ ) v = ψ → 0 lim ψ ψ ∧ C ψ = ψ → 0 lim ψ − ( C ψ ) ∧ ψ = − ( C ψ ) ∧ 위의 결과에서는 J \mathbf{J} J
Scalar 함수(error 함수 등)를 가정했을때, 최적화의 대상이 되는 cost function은 다음과 같다(가장 많이 사용되는 최소제곱문제의 형태).
J ( C ) = 1 2 ∑ m ( u m ( C v m ) ) 2 J(\mathbf{C}) = \frac{1}{2}\sum_{m}{(u_m(\mathbf{C}\mathbf{v_m}))^2} J ( C ) = 2 1 m ∑ ( u m ( C v m ) ) 2 위의 cost function은 여러개의 scalar 함수가 합쳐진 최소제곱문제 형태이다. C o p \mathbf{C}_{op} C o p C = e x p ( ψ ∧ ) C o p \mathbf{C} = exp(\psi^\wedge)\mathbf{C}_{op} C = e x p ( ψ ∧ ) C o p
u m ( C v m ) = u m ( e x p ( ψ ∧ ) C o p v m ) ≈ u m ( ( 1 + ψ ∧ ) C o p v m ) ≈ u m ( C o p v m ) − ∂ u m ∂ x ( C o p v m ) ∧ ψ = β m + δ m T ψ \begin{aligned} u_m(\mathbf{C}\mathbf{v_m}) & = u_m(exp(\psi^\wedge)\mathbf{C}_{op}\mathbf{v_m}) \approx u_m((1+\psi^\wedge)\mathbf{C}_{op}\mathbf{v_m})\\ & \approx u_m(\mathbf{C}_{op}\mathbf{v_m}) - \frac{\partial u_m}{\partial \mathbf{x}}(\mathbf{C}_{op}\mathbf{v_m})^\wedge\psi\\ & = \beta_m + \delta_m^T\psi \end{aligned} u m ( C v m ) = u m ( e x p ( ψ ∧ ) C o p v m ) ≈ u m ( ( 1 + ψ ∧ ) C o p v m ) ≈ u m ( C o p v m ) − ∂ x ∂ u m ( C o p v m ) ∧ ψ = β m + δ m T ψ J ( C ) ≈ 1 2 ∑ m ( β m + δ m T ψ ) 2 J(\mathbf{C}) \approx \frac{1}{2}\sum_{m}{(\beta_m + \delta_m^T\psi)^2} J ( C ) ≈ 2 1 m ∑ ( β m + δ m T ψ ) 2 이제 J J J ψ \psi ψ
∂ J ∂ ψ T = ∑ m δ m ( β m + δ m T ψ ) \frac{\partial J}{\partial \psi^T}=\sum_{m}{\delta_m(\beta_m + \delta_m^T\psi)} ∂ ψ T ∂ J = m ∑ δ m ( β m + δ m T ψ ) J J J
( ∑ m δ m δ m T ) ψ ∗ = − ∑ m β m δ m (\sum_m{\delta_m \delta_m^T})\psi^* = - \sum_m \beta_m \delta_m ( m ∑ δ m δ m T ) ψ ∗ = − m ∑ β m δ m 위의 식은 최적의 값인 ψ ∗ \psi^* ψ ∗
C o p ← e x p ( ( ψ ∗ ) ∧ ) C o p \mathbf{C}_{op} \leftarrow exp((\psi^*)^\wedge)\mathbf{C}_{op} C o p ← e x p ( ( ψ ∗ ) ∧ ) C o p 5.2. SE(3): Pose
S E ( 3 ) SE(3) S E ( 3 ) T 1 = e x p ( ξ 1 ∧ ) , T 2 = e x p ( ξ 2 ∧ ) \mathbf{T_1}=exp(\xi_1^\wedge), \mathbf{T_2}=exp(\xi_2^\wedge) T 1 = e x p ( ξ 1 ∧ ) , T 2 = e x p ( ξ 2 ∧ )
ln ( T 1 T 2 ) ∨ = ln ( e x p ( ξ 1 ∧ ) e x p ( ξ 2 ∧ ) ) ∨ ≈ { J l ( ξ 2 ) − 1 ξ 1 + ξ 2 ⋯ ξ 1 이 작은 경우 ξ 1 + J r ( ξ 1 ) − 1 ξ 2 ⋯ ξ 2 이 작은 경우 \ln(\mathbf{T_1}\mathbf{T_2})^\vee = \ln(exp(\xi_1^\wedge)exp(\xi_2^\wedge))^\vee \approx \begin{cases} \mathbf{\mathcal{J}}_l(\xi_2)^{-1}\xi_1 + \xi_2 \;\;\;\;\;\; \cdots \;\;\text{$\xi_1$이 작은 경우} \\ \xi_1 + \mathbf{\mathcal{J}}_r(\xi_1)^{-1}\xi_2 \;\;\;\;\;\; \cdots \;\;\text{$\xi_2$이 작은 경우} \end{cases} ln ( T 1 T 2 ) ∨ = ln ( e x p ( ξ 1 ∧ ) e x p ( ξ 2 ∧ ) ) ∨ ≈ { J l ( ξ 2 ) − 1 ξ 1 + ξ 2 ⋯ ξ 1 이 작은 경우 ξ 1 + J r ( ξ 1 ) − 1 ξ 2 ⋯ ξ 2 이 작은 경우 여기서 각 Jacobian은 다음과 같이 정의된다.
J l ( ξ ) = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( ξ ⊼ ) n = ∫ 0 1 T − α d α = ( J l Q l 0 J l ) \mathbf{\mathcal{J}}_l(\xi) = \sum^{\infin}_{n=0}{\frac{1}{(n+1)!}(\xi^\barwedge)^n} = \int_0^1\mathcal{T}^{-\alpha}d\alpha= \begin{pmatrix} \mathbf{J}_l & \mathbf{Q}_l \\ \mathbf{0} & \mathbf{J}_l \end{pmatrix} J l ( ξ ) = n = 0 ∑ ∞ ( n + 1 ) ! 1 ( ξ ⊼ ) n = ∫ 0 1 T − α d α = ( J l 0 Q l J l ) J r ( ξ ) = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( − ξ ⊼ ) n = ∫ 0 1 T α d α = ( J r Q r 0 J r ) \mathbf{\mathcal{J}}_r(\xi) = \sum^{\infin}_{n=0}{\frac{1}{(n+1)!}(-\xi^\barwedge)^n} = \int_0^1\mathcal{T}^{\alpha}d\alpha= \begin{pmatrix} \mathbf{J}_r & \mathbf{Q}_r \\ \mathbf{0} & \mathbf{J}_r \end{pmatrix} J r ( ξ ) = n = 0 ∑ ∞ ( n + 1 ) ! 1 ( − ξ ⊼ ) n = ∫ 0 1 T α d α = ( J r 0 Q r J r ) Q l ( ξ ) = ∑ n = 0 ∞ ∑ m = 0 ∞ 1 ( n + m + 2 ) ! ( ϕ ∧ ) n ρ ∧ ( ϕ ∧ ) m = 1 2 ϕ ∧ + ( ϕ − sin ϕ ϕ 3 ) ( ϕ ∧ ρ ∧ + ρ ∧ ϕ ∧ + ϕ ∧ ρ ∧ ϕ ∧ ) + ( ϕ 2 − 2 cos ϕ − 2 2 ϕ 4 ) ( ϕ ∧ ϕ ∧ ρ ∧ + ρ ∧ ϕ ∧ ϕ ∧ + 3 ϕ ∧ ρ ∧ ϕ ∧ ) + ( 2 ϕ − 3 sin ϕ − ϕ cos ϕ 2 ϕ 5 ) ( ϕ ∧ ρ ∧ ϕ ∧ ϕ ∧ + ϕ ∧ ϕ ∧ ρ ∧ ϕ ∧ ) \begin{aligned} \mathbf{Q}_l(\xi) & = \sum^{\infin}_{n=0}{\sum^{\infin}_{m=0}{\frac{1}{(n+m+2)!}(\phi^\wedge)^n\rho^\wedge(\phi^\wedge)^m}} \\ & = \frac{1}{2}\phi^\wedge + \left( \frac{\phi -\sin\phi}{\phi^3} \right)(\phi^\wedge\rho^\wedge+\rho^\wedge\phi^\wedge+\phi^\wedge\rho^\wedge\phi^\wedge)\\ & + \left( \frac{\phi^2 -2\cos\phi-2}{2\phi^4} \right)(\phi^\wedge\phi^\wedge\rho^\wedge+\rho^\wedge\phi^\wedge\phi^\wedge+3\phi^\wedge\rho^\wedge\phi^\wedge)\\ & +\left( \frac{2\phi -3\sin\phi-\phi\cos\phi}{2\phi^5} \right)(\phi^\wedge\rho^\wedge\phi^\wedge\phi^\wedge+\phi^\wedge\phi^\wedge\rho^\wedge\phi^\wedge) \end{aligned} Q l ( ξ ) = n = 0 ∑ ∞ m = 0 ∑ ∞ ( n + m + 2 ) ! 1 ( ϕ ∧ ) n ρ ∧ ( ϕ ∧ ) m = 2 1 ϕ ∧ + ( ϕ 3 ϕ − sin ϕ ) ( ϕ ∧ ρ ∧ + ρ ∧ ϕ ∧ + ϕ ∧ ρ ∧ ϕ ∧ ) + ( 2 ϕ 4 ϕ 2 − 2 cos ϕ − 2 ) ( ϕ ∧ ϕ ∧ ρ ∧ + ρ ∧ ϕ ∧ ϕ ∧ + 3 ϕ ∧ ρ ∧ ϕ ∧ ) + ( 2 ϕ 5 2 ϕ − 3 sin ϕ − ϕ cos ϕ ) ( ϕ ∧ ρ ∧ ϕ ∧ ϕ ∧ + ϕ ∧ ϕ ∧ ρ ∧ ϕ ∧ ) Q r ( ξ ) = Q l ( − ξ ) \mathbf{Q}_r(\xi) = \mathbf{Q}_l(-\xi) Q r ( ξ ) = Q l ( − ξ ) ξ ⊼ = ( ρ ϕ ) ⊼ = ( ϕ ∧ ρ ∧ 0 ϕ ∧ ) ∈ R 6 × 6 \xi^\barwedge = \begin{pmatrix} \rho \\ \phi \end{pmatrix}^\barwedge = \begin{pmatrix} \phi^\wedge & \rho^\wedge\\ \mathbf{0} & \phi^\wedge \end{pmatrix} \in \mathcal{R}^{6 \times 6} ξ ⊼ = ( ρ ϕ ) ⊼ = ( ϕ ∧ 0 ρ ∧ ϕ ∧ ) ∈ R 6 × 6 T = e x p ( ξ ⊼ ) = ∑ n = 0 ∞ 1 n ! ( ξ ⊼ ) n \mathbf{\mathcal{T}}=exp(\xi^\barwedge)=\sum^{\infin}_{n=0}{\frac{1}{n!}(\xi^\barwedge)^n} T = e x p ( ξ ⊼ ) = n = 0 ∑ ∞ n ! 1 ( ξ ⊼ ) n T = A d ( T ) = A d ( ( C r 0 T 1 ) ) = ( C r ∧ C 0 T C ) \mathbf{\mathcal{T}}=Ad(\mathbf{T})=Ad \left( \begin{pmatrix} \mathbf{C} & \mathbf{r} \\ \mathbf{0}^T & 1 \end{pmatrix} \right) = \begin{pmatrix} \mathbf{C} & \mathbf{r}^\wedge \mathbf{C} \\ \mathbf{0}^T & \mathbf{C} \end{pmatrix} T = A d ( T ) = A d ( ( C 0 T r 1 ) ) = ( C 0 T r ∧ C C ) 이때, T \mathbf{\mathcal{T}} T S E ( 3 ) SE(3) S E ( 3 ) T \mathbf{\mathcal{T}} T ξ ⊼ \xi^\barwedge ξ ⊼
이때, S O ( 3 ) SO(3) S O ( 3 ) J r ( ξ ) = J l ( − ξ ) \mathbf{\mathcal{J}}_r(\xi)=\mathbf{\mathcal{J}}_l(-\xi) J r ( ξ ) = J l ( − ξ ) J l ( ξ ) = T J r ( ξ ) \mathbf{\mathcal{J}}_l(\xi)=\mathbf{\mathcal{T}}\mathbf{\mathcal{J}}_r(\xi) J l ( ξ ) = T J r ( ξ )
S E ( 3 ) SE(3) S E ( 3 ) ⊙ ^\odot ⊙
ξ = ( ϵ η ) ⊙ = ( η I − ϵ ∧ 0 T 0 T ) \xi = \begin{pmatrix} \epsilon \\ \eta \end{pmatrix}^\odot = \begin{pmatrix} \eta\mathbf{I} & -\epsilon^\wedge \\ \mathbf{0}^T & \mathbf{0}^T \end{pmatrix} ξ = ( ϵ η ) ⊙ = ( η I 0 T − ϵ ∧ 0 T ) ⊙ ^\odot ⊙ ξ ∧ p = p ⊙ ξ \xi^\wedge\mathbf{p}=\mathbf{p}^\odot\xi ξ ∧ p = p ⊙ ξ ( T p ) ⊙ = T p ⊙ T − 1 (\mathbf{T}\mathbf{p})^\odot=\mathbf{T}\mathbf{p}^\odot\mathcal{T}^{-1} ( T p ) ⊙ = T p ⊙ T − 1
⊙ ^\odot ⊙ S E ( 3 ) SE(3) S E ( 3 ) ξ \xi ξ ϵ \epsilon ϵ
∂ ( T p ) ξ = ( T p ) ⊙ J \frac{\partial (\mathbf{T}\mathbf{p})}{\xi}=(\mathbf{T}\mathbf{p})^\odot\mathbf{\mathcal{J}} ξ ∂ ( T p ) = ( T p ) ⊙ J ∂ ( T p ) ϵ = ( T p ) ⊙ \frac{\partial (\mathbf{T}\mathbf{p})}{\epsilon}=(\mathbf{T}\mathbf{p})^\odot ϵ ∂ ( T p ) = ( T p ) ⊙ Jacobian이 포함되지 않은 섭동 식으로 cost 함수를 미분해보면 다음과 같다.
J ( T ) = 1 2 ∑ m ( u m ( T p m ) ) 2 J(\mathbf{T}) = \frac{1}{2}\sum_{m}{(u_m(\mathbf{T}\mathbf{p_m}))^2} J ( T ) = 2 1 m ∑ ( u m ( T p m ) ) 2 u m ( T p m ) = u m ( e x p ( ϵ ∧ ) T o p p m ) ≈ u m ( ( 1 + ϵ ∧ ) T o p p m ) ≈ u m ( T o p p m ) − ∂ u m ∂ x ∣ x = T o p p m ( T o p p m ) ∧ ϵ = β m + δ m T ϵ \begin{aligned} u_m(\mathbf{T}\mathbf{p_m}) & = u_m(exp(\epsilon^\wedge)\mathbf{T}_{op}\mathbf{p_m}) \approx u_m((1+\epsilon^\wedge)\mathbf{T}_{op}\mathbf{p_m})\\ & \approx u_m(\mathbf{T}_{op}\mathbf{p_m}) - \left. \frac{\partial u_m}{\partial \mathbf{x}}\right|_{\mathbf{x}=\mathbf{T}_{op}\mathbf{p_m}} (\mathbf{T}_{op}\mathbf{p_m})^\wedge\epsilon\\ & = \beta_m + \delta_m^T\epsilon \end{aligned} u m ( T p m ) = u m ( e x p ( ϵ ∧ ) T o p p m ) ≈ u m ( ( 1 + ϵ ∧ ) T o p p m ) ≈ u m ( T o p p m ) − ∂ x ∂ u m ∣ ∣ ∣ ∣ ∣ x = T o p p m ( T o p p m ) ∧ ϵ = β m + δ m T ϵ J ( C ) ≈ 1 2 ∑ m ( β m + δ m T ϵ ) 2 J(\mathbf{C}) \approx \frac{1}{2}\sum_{m}{(\beta_m + \delta_m^T\epsilon)^2} J ( C ) ≈ 2 1 m ∑ ( β m + δ m T ϵ ) 2 ∂ J ∂ ϵ T = ∑ m δ m ( β m + δ m T ϵ ) \frac{\partial J}{\partial \epsilon^T}=\sum_{m}{\delta_m(\beta_m + \delta_m^T\epsilon)} ∂ ϵ T ∂ J = m ∑ δ m ( β m + δ m T ϵ ) 여기서 최적의 ϵ \epsilon ϵ
( ∑ m δ m δ m T ) ϵ ∗ = − ∑ m β m δ m (\sum_m{\delta_m \delta_m^T})\epsilon^* = - \sum_m \beta_m \delta_m ( m ∑ δ m δ m T ) ϵ ∗ = − m ∑ β m δ m T o p ← e x p ( ( ϵ ∗ ) ∧ ) T o p \mathbf{T}_{op} \leftarrow exp((\epsilon^*)^\wedge)\mathbf{T}_{op} T o p ← e x p ( ( ϵ ∗ ) ∧ ) T o p 여기서 우리는 Lie 대수를 최적화 등에 사용할 때의 장점을 알 수 있다. 많이 사용되는 Gauss-Newton 기반의 최적화를 살펴보면 미소 변화를 더하며 업데이트를 수행하고 그 과정을 반복하여 최적화를 진행한다. 하지만 S O ( 3 ) , S E ( 3 ) SO(3), SE(3) S O ( 3 ) , S E ( 3 )