SLAM: 기초 컴퓨터 비전부터 visual&LiDAR SLAM까지
1.SLAM: 기초 컴퓨터 비전부터 Visual&LiDAR SLAM까지
SLAM 시리즈 소개
2021년 11월 18일
2.기초 컴퓨터 비전: (1) 선형 변환
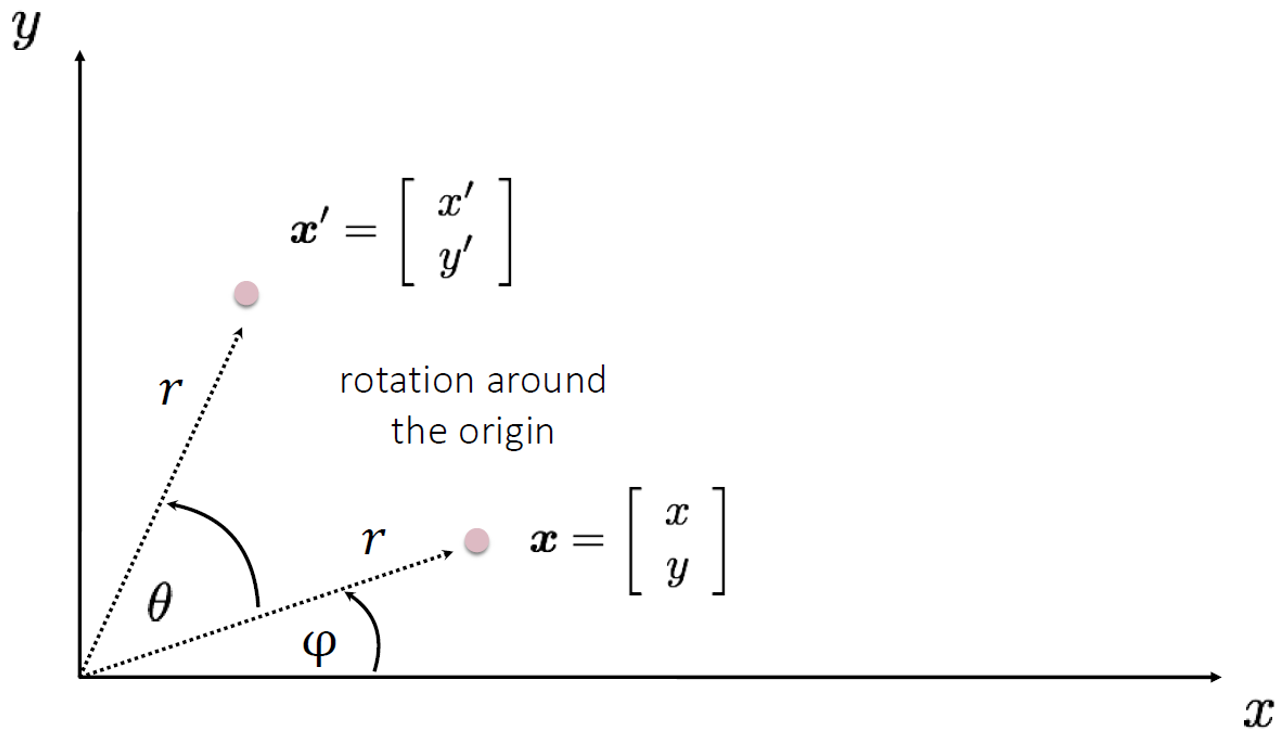
컴퓨터 비전 이해를 위한 기본 선형 변환 개념
2021년 11월 18일
3.기초 컴퓨터 비전: (2) 카메라 모델와 Homogeneous 좌표
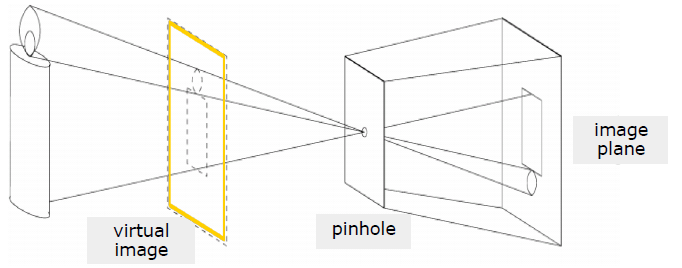
카메라 모델 및 homogeneous 좌표계 개념 설명
2021년 11월 26일
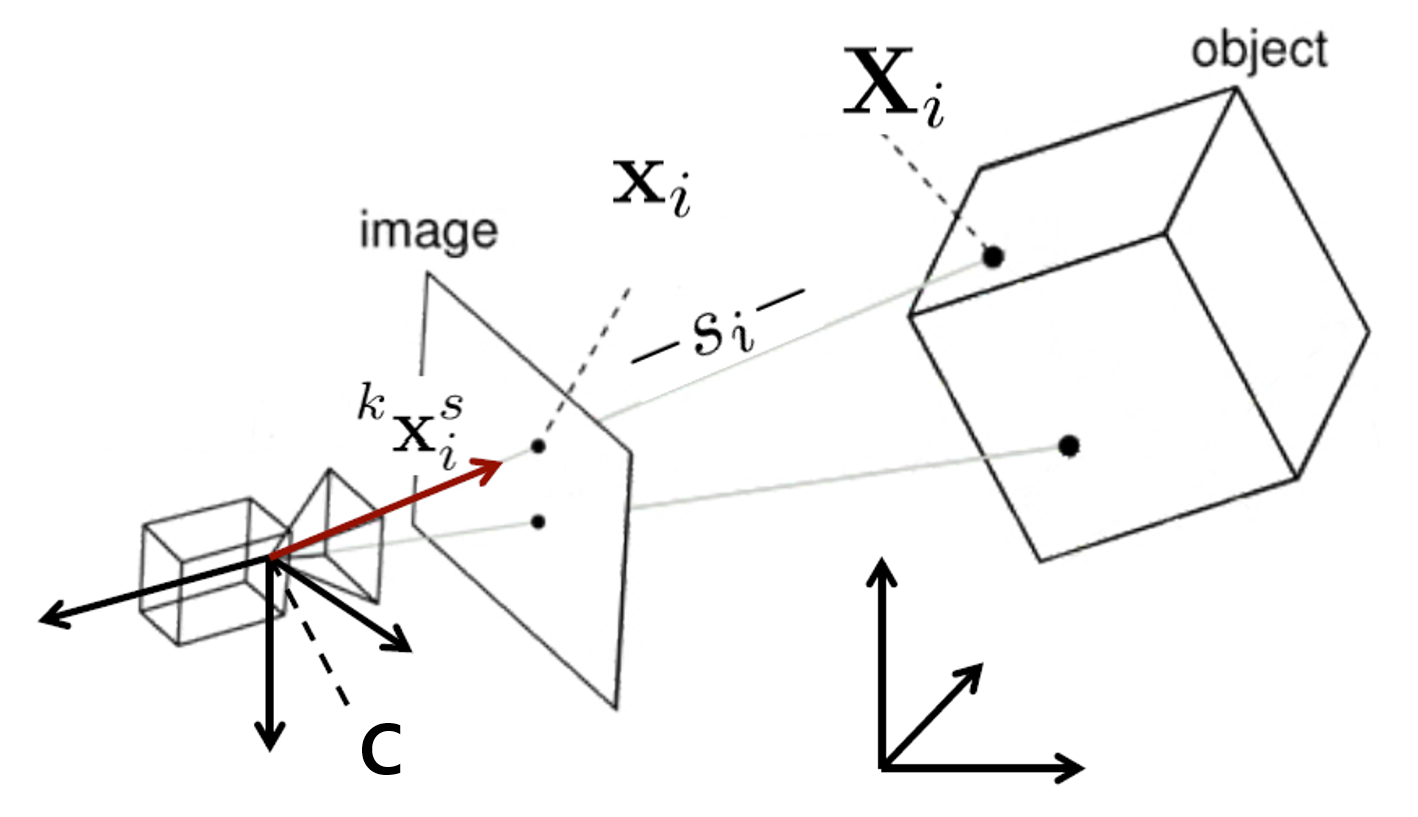
4.기초 컴퓨터 비전: (3) Projection & Camera Parameter
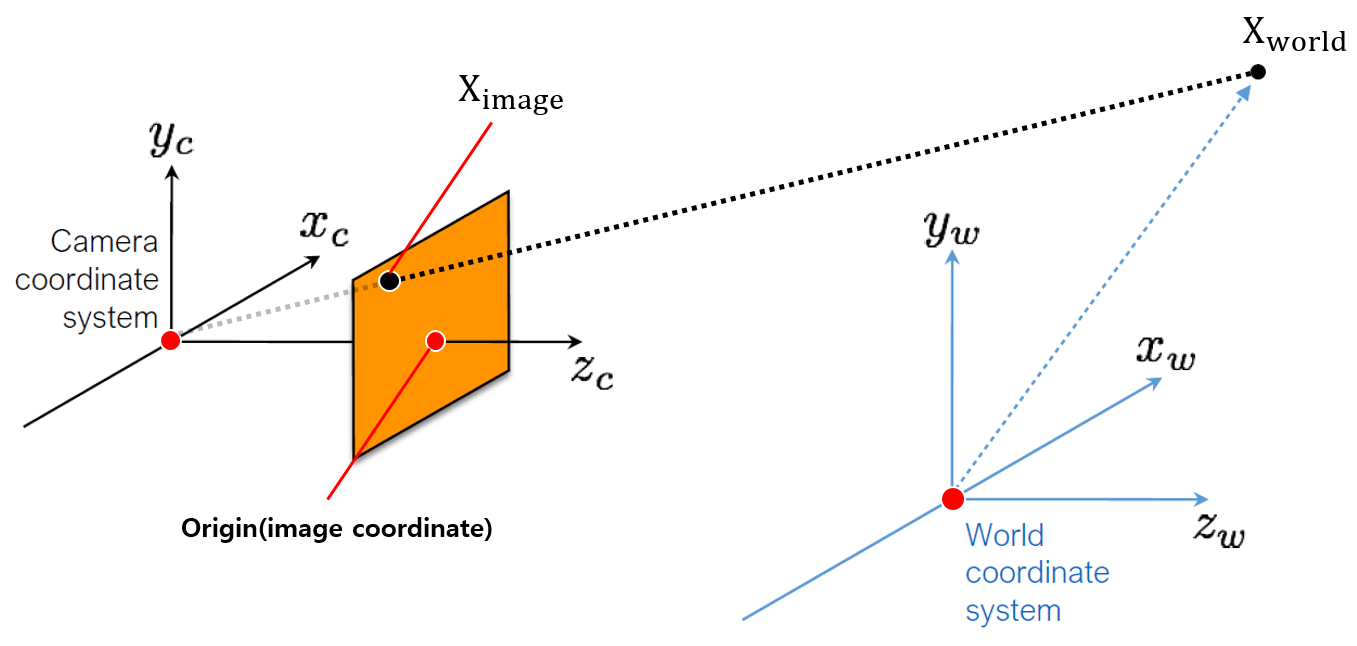
Image projection 과정과 이를 식으로 표현하기 위한 카메라 파라미터 개념
2021년 12월 17일
5.Basic Linear Algebra

기초 선형대수
2021년 12월 23일
6.Matrix Decomposition(1) LU Decomposition

행렬 분해 1: LU 분해
2021년 12월 28일
7.Matrix Decomposition(2): QR Decomposition

행렬 분해 2: QR 분해
2021년 12월 30일
8.Matrix Decomposition(3): SVD

행렬 분해 3: SVD
2022년 1월 7일
9.Matrix Decomposition(4): Cholesky Decomposition

행렬 분해 4: Cholesky 분해
2022년 1월 17일
10.기초 컴퓨터 비전: (4) Calibration
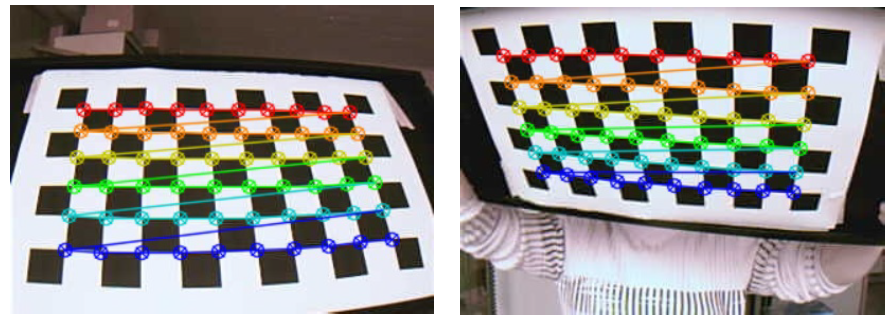
켈리브레이션의 원리 등
2022년 1월 3일
11.기초 컴퓨터 비전: (5) P3P
P3P 개념 및 원리
2022년 1월 18일
12.기초 컴퓨터 비전: (6) Epipolar
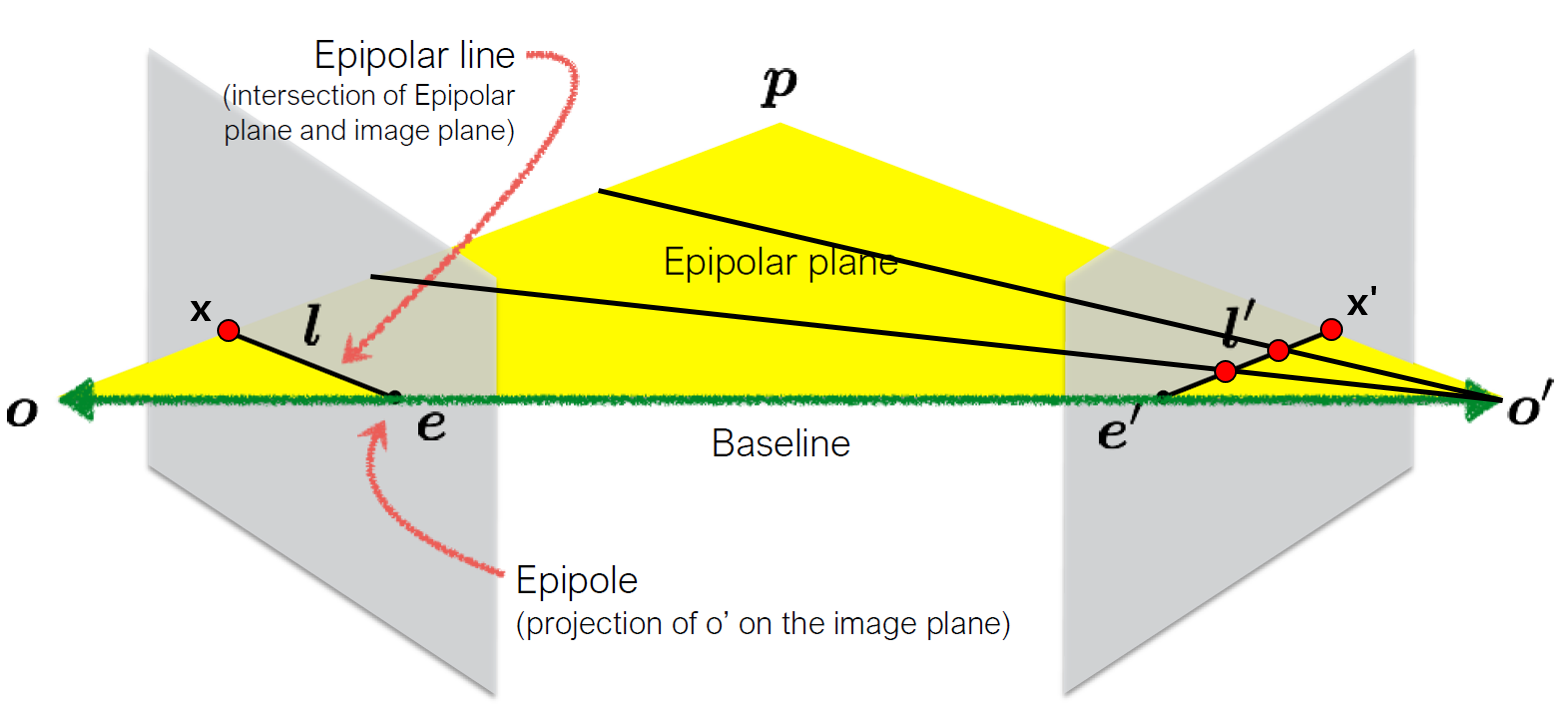
Epipolar 기하 개념 및 원리
2022년 1월 19일
13.기초 컴퓨터 비전: (7) Stereo
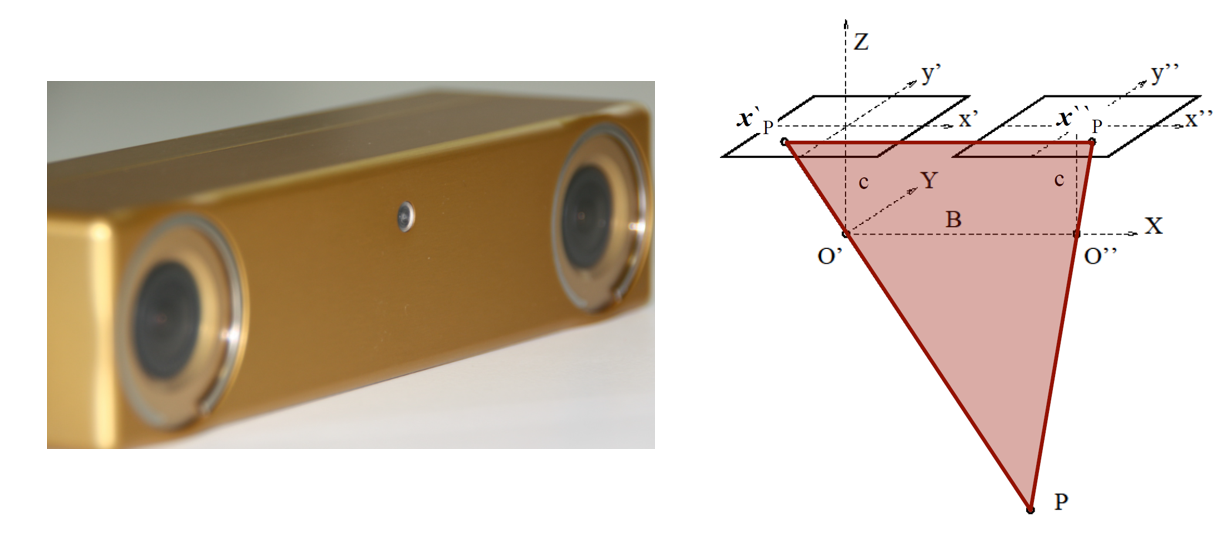
스테레오 비전 개념 및 원리
2022년 2월 8일
14.기초 컴퓨터 비전: (8) Corresponding Points
이미지 특징점, 매칭, 추적 방법 등
2022년 2월 14일
15.Rotation Representation

앞에서 우리는 회전 및 변환 행렬을 곱하여 어떤 점이나 좌표계를 transform하였다. 하지만 회전 행렬을 보면, $\mathbf{R} \sub SO(3)$이므로 직교행렬($\mathbf{R}^T\mathbf{R}=\mathbf{I}$) 및 $det(\mathbf{R
2022년 2월 21일
16.Lie Group & Lie Algebra
1. Group 군(group)이란 어떤 집합과 연산자로 이루어져 있으며, $G=(\cdot, A)$등과 같이 쓸 수 있고, 다음의 성질을 갖는다. 닫힘성(Closure): $\forall a, b \in A, a \cdot b \in A$ 결합성(Associativ
2022년 2월 23일
17.수치최적화 방법
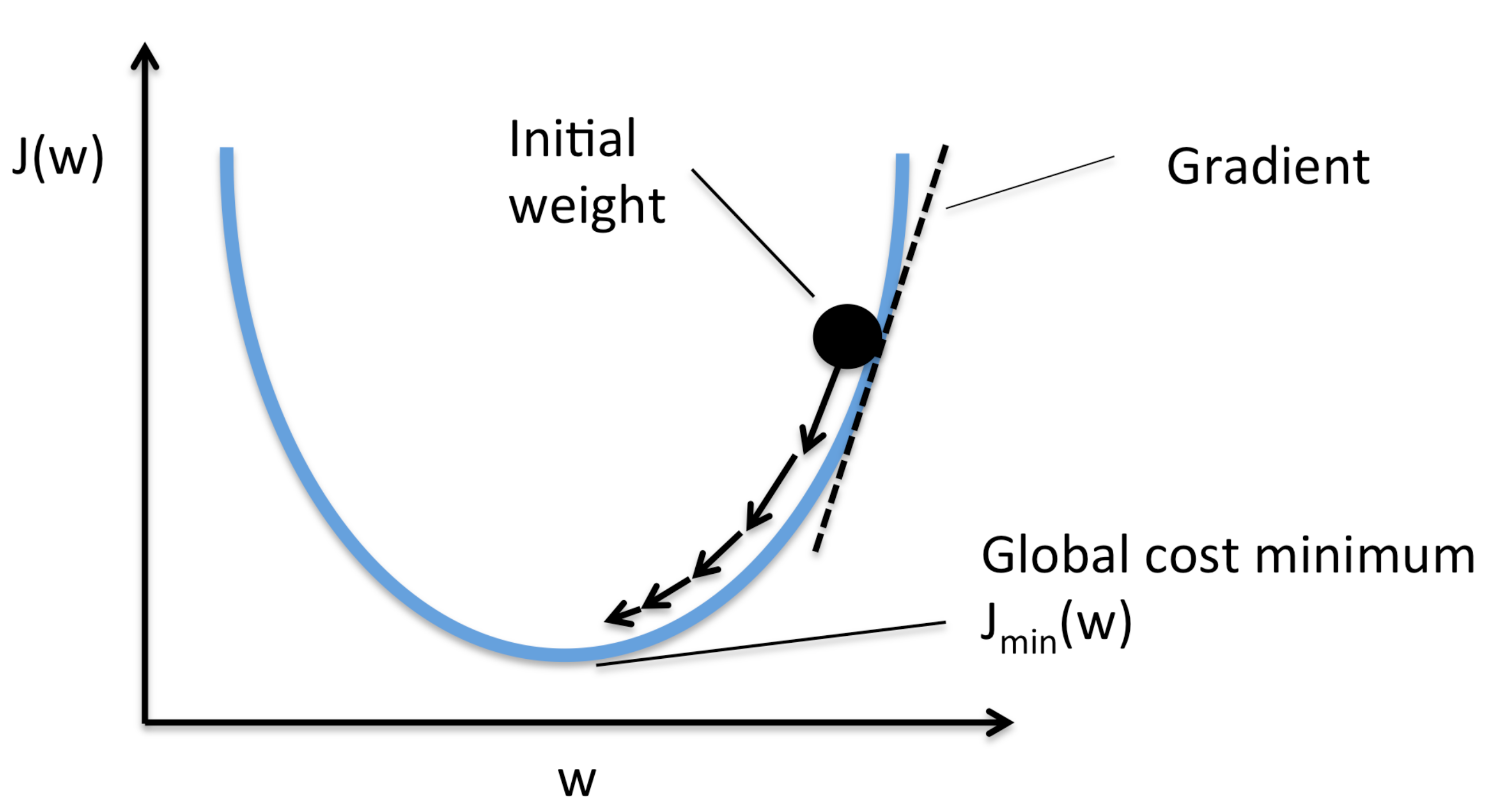
수치최적화 방법 소개(Gauss-Newton, LM 등)
2022년 2월 21일