앞에서 우리는 카메라 캘리브레이션을 통해 카메라 파라미터를 구하였다. 다만 DLT에서는 내/외부 파라미터를 모두 구하였지만, Zhang's method나 타 캘리브레이션 방법들은 많은 경우 내부 파라미터를 구하는 것에 집중한다. 그렇다면 왜곡보정 및 내부 파라미터가 계산된 calibrated camera의 외부 파라미터(포즈)를 어떻게 구할 수 있을까? 여러가지 방법이 있지만, P3P(Projective 3-Point) 알고리즘은 3D 좌표가 알려진 3개의 점을 통해 카메라의 외부 파라미터(포즈)를 추정하는 대표적인 방법이다.
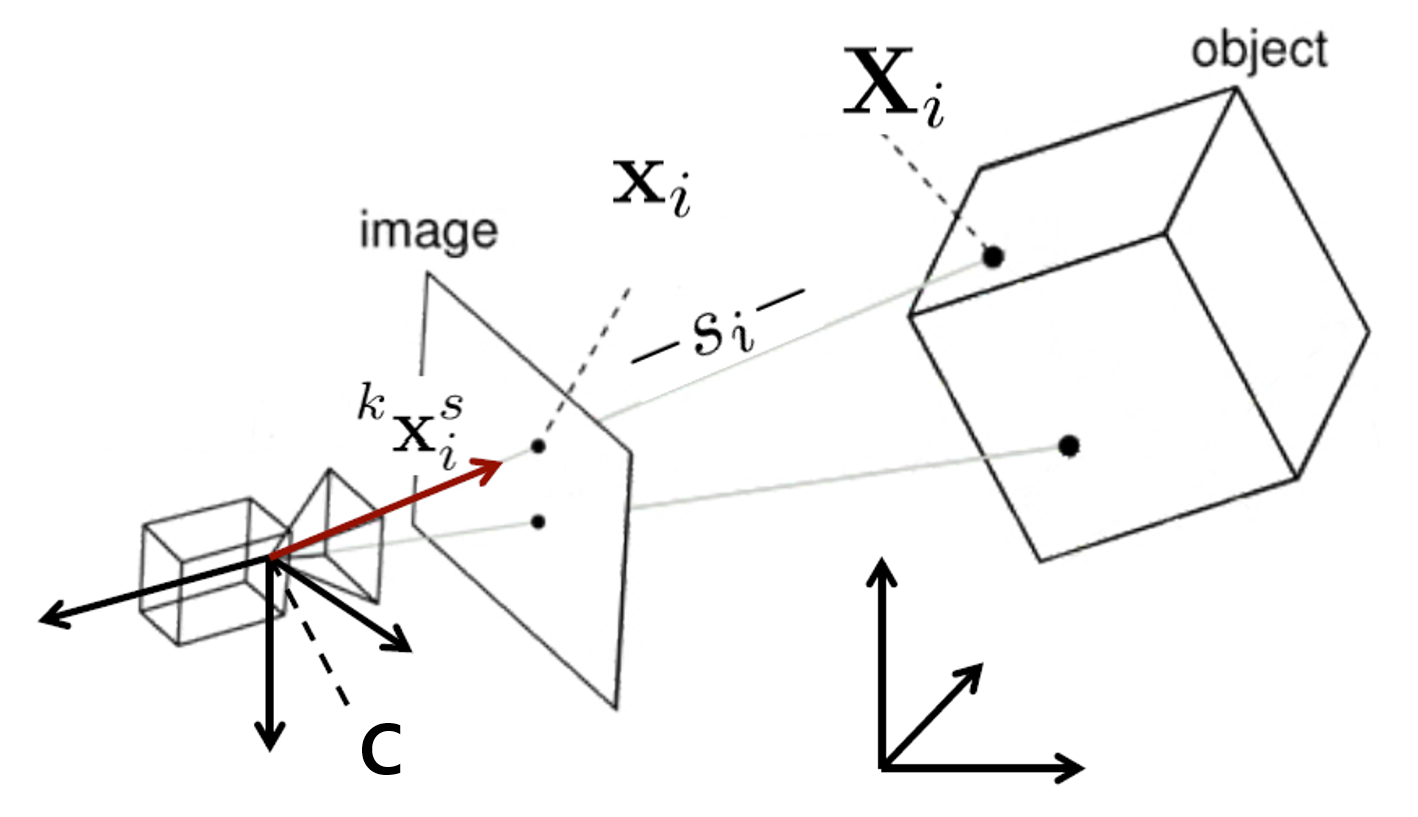
Figure 1. 객체 및 카메라 구성
위 그림에서 객체의 world 좌표 위치 Xi와 카메라좌표 상의 투영 간의 관계는 다음과 같다.
sikxis=R(Xi−C)
우변은 객체의 world 좌표 위치 Xi를 카메라 좌표로 옮기기 위하여 알맞는 평행이동, 회전을 가한 것이며, 좌변은 카메라 영상에 투영된 위치에 대한 단위 벡터 kxis에 알맞는 스칼라 값을 곱해 객체와 같은 위치를 가리키게 한 것이다. 이때, 주목할 점은 우리가 이미 카메라의 내부 파라미터는 알고 있다고 가정하였기 때문에 카메라의 초점거리, 중심(principle point) 등을 통해 kxis는 카메라의 외부 파라미터 없이 알 수 있다는 점이다.
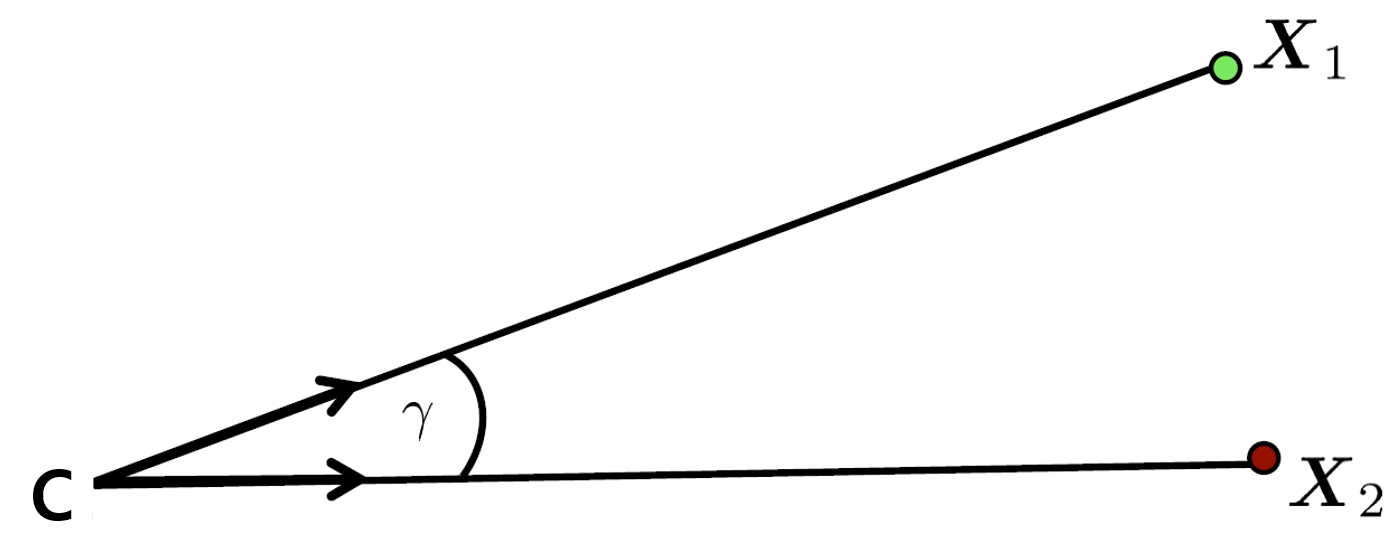
Figure2. 두 점 사이의 각도
이러한 kxis을 사용하여 위 그림과 같은 상황에서 각도 γ를 알아 낼 수 있다. 예를 들어 Figure 2에서는 CX1의 방향은 kx1s과 같고, CX2의 방향은 kx2s와 같다. 따라서 cosγ=kx1s⋅kx2s이므로 각도 γ를 알아 낼 수 있다.
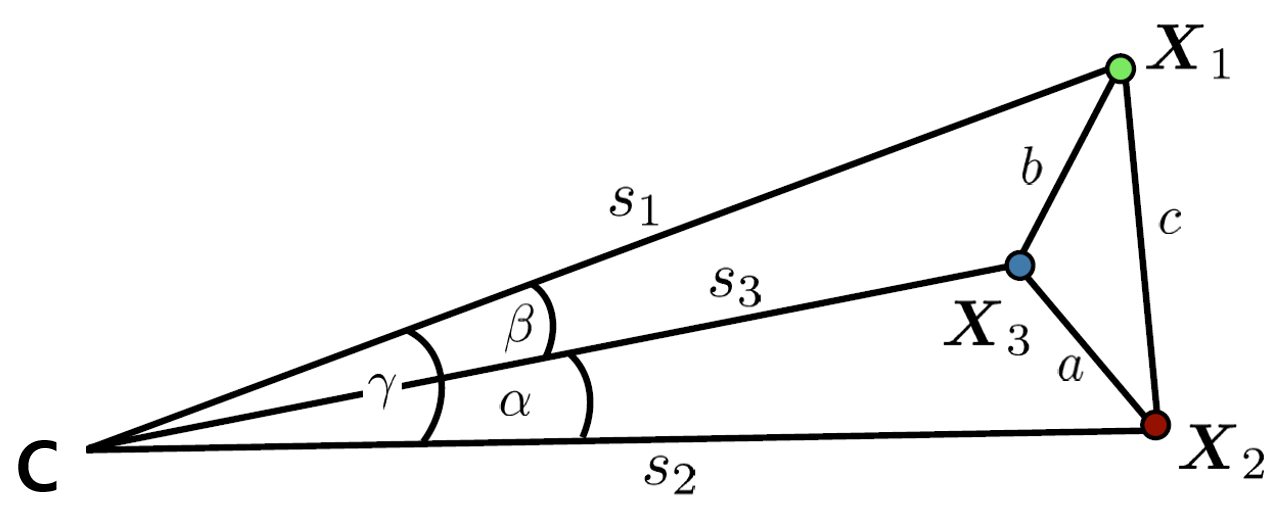
Figure3. 3개의 점이 주어졌을 때
그렇다면 위와 같이 3개의 점이 주어졌을 때 제2코사인 법칙을 사용하여 다음과 같은 식을 만들 수 있다.
a2=s22+s32−2s22s32cosαb2=s12+s32−2s12s32cosβc2=s12+s22−2s12s22cosγ
여기서 u=s2/s1,v=s3/s1으로 두면 다음과 같이 정리할 수 있다.
s12=u2+v2−2uvcosαa2=1+v2−2vcosβb2=u2+1−2ucosγc2
위의 식을 정리하면 A4v4+A3v3+A2v2+A1v+A0=0와 같이 v에 대한 4차 식으로 정리할 수 있다. 각 계수들은 다음과 같으며, 이는 위의 식을 활용하여 직접 전개해보면 알 수 있다.
A4A3A2A1A0=(b2a2−c2−1)2−b24c2cos2α=4[b2a2−c2(1−b2a2−c2)cosβ−(1−b2a2+c2)cosαcosγ+2b2c2cos2αcosβ]=2[(b2a2−c2)2−1+2(b2a2−c2)2cos2β+2(b2b2−c2)cos2α−4(b2a2+c2)cosαcosβcosγ+2(b2b2−a2)cos2γ]=4[−(b2a2−c2)(1+b2a2−c2)cosβ+b22a2cos2γcosβ−(1−b2a2+c2)cosαcosγ]=(1−b2a2−c2)2−b24a2cos2γ
위의 4차 방정식을 풀어 v를 구한 후, s1,s2,s3를 구할 수 있는데, 4차 방정식의 해는 최대 4종류 나올 수 있으므로 s1,s2,s3 또한 4종류가 나온다. 이러한 문제를 해결하기 위하여 GPS등의 센서를 이용하여 대략적인 해를 사용하거나 4번째 점을 추가하여 유일한 해를 찾게 된다.
이제 3개 점에 대한 깊이 정보 s1,s2,s3를 취득하였으며, 3D-2D 간 투영식인 sikxis=R(Xi−C)에 대입하여 우리가 필요로 하는 R,C를 구할 수 있다.
만약 주어진 점이 3개보다 많다면 RANSAC 등의 방법을 통해 더욱 좋은 해를 찾을 수도 있다.
