[논문리뷰] Image Inpainting for Irregular Holes Using Partial Convolutions
1. Introduction
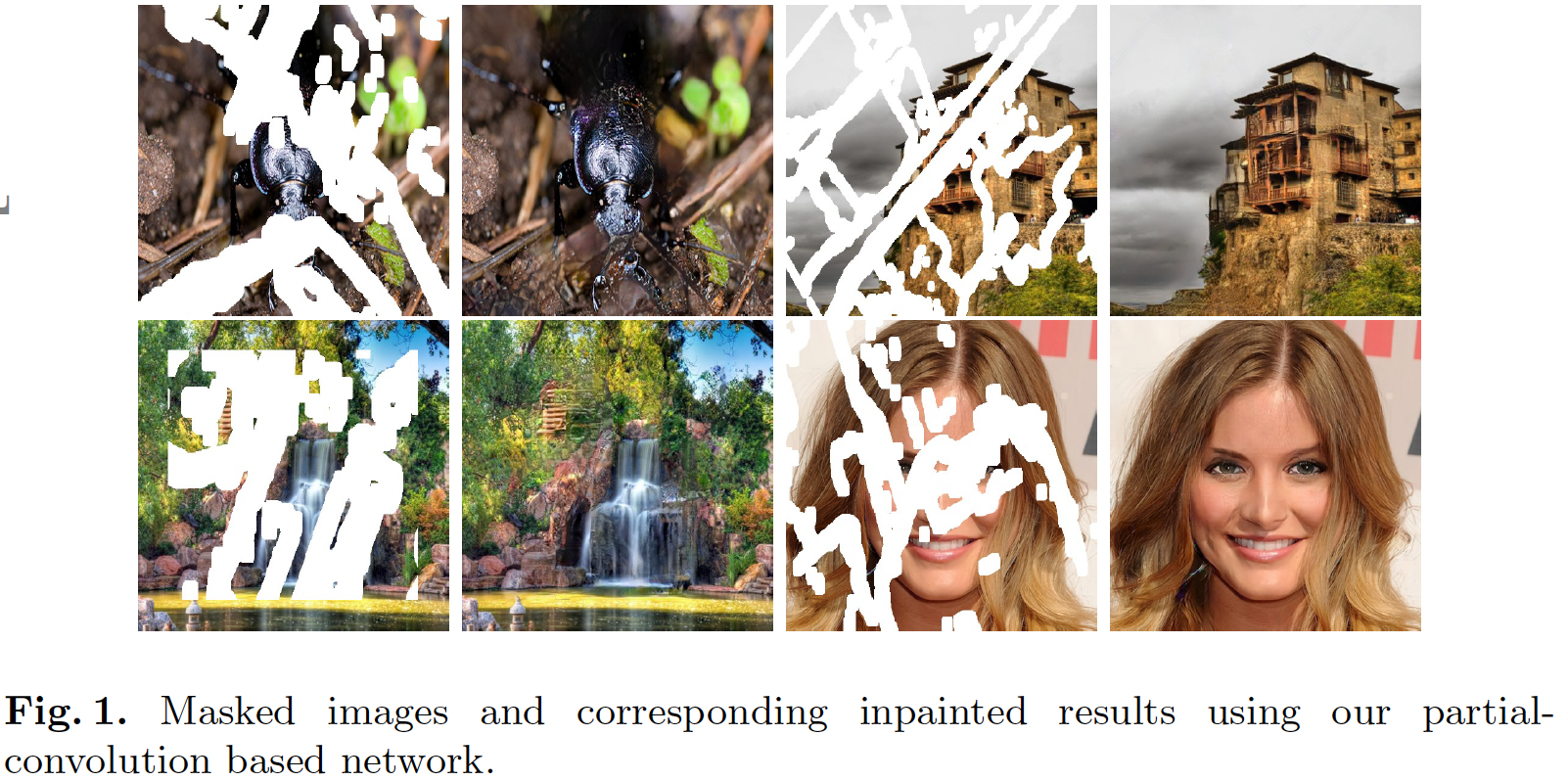
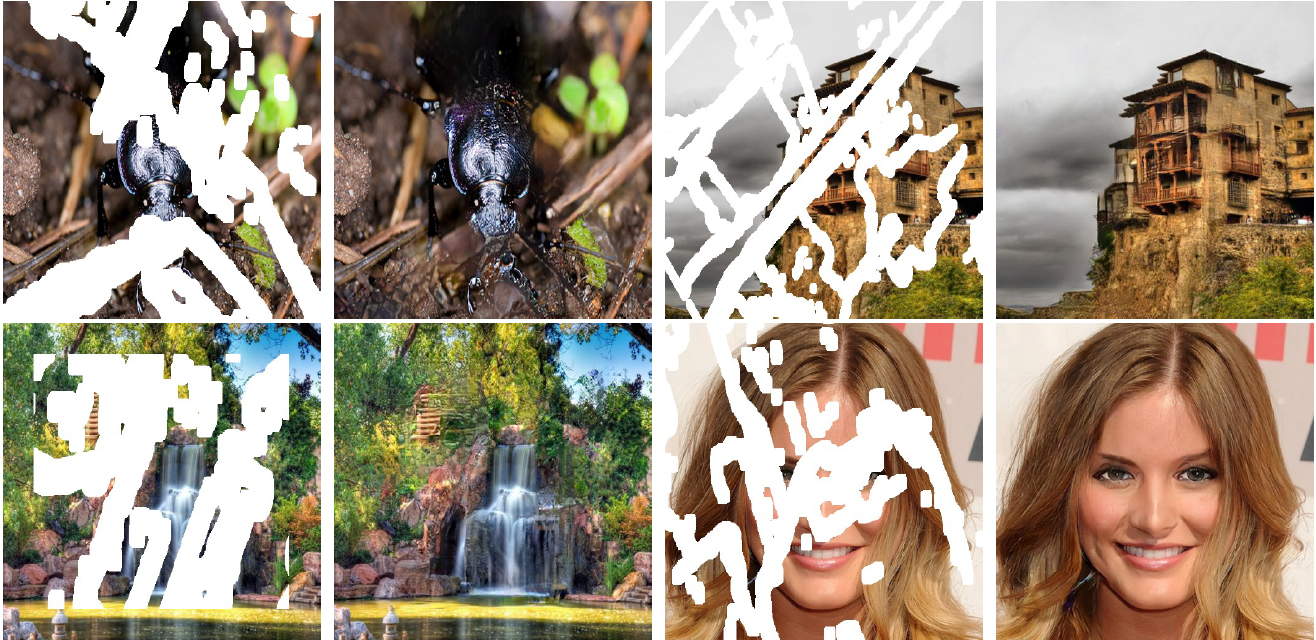
Image inpainting는 위와 같이 이미지의 hole 부분을 자연스럽고 그럴듯하게 채워넣는 것이다. 이 논문에서는 Irregular한 구멍들을 Partial Convolution을 이용해 Image inpainting하는 방법을 제안한다.

(a)와 같은 이미지를 여러 기법으로 inpainting 했을 때의 결과를 보여준다. 평균값으로 채우거나 (e, f) 여러 다른 기법을 사용한 것 (b, c, d) 보다 논문에서 제안하는 Partial Conv를 이용했을 때 더 inpainting을 잘 했다는 것을 보여준다.
2. Approach
이 논문에서 처음으로 제안하는 Partial Conv와 이를 쌓아서 만든 Model architecture, Loss function을 소개해보자 한다.
2-1. Partial Convolutional layer
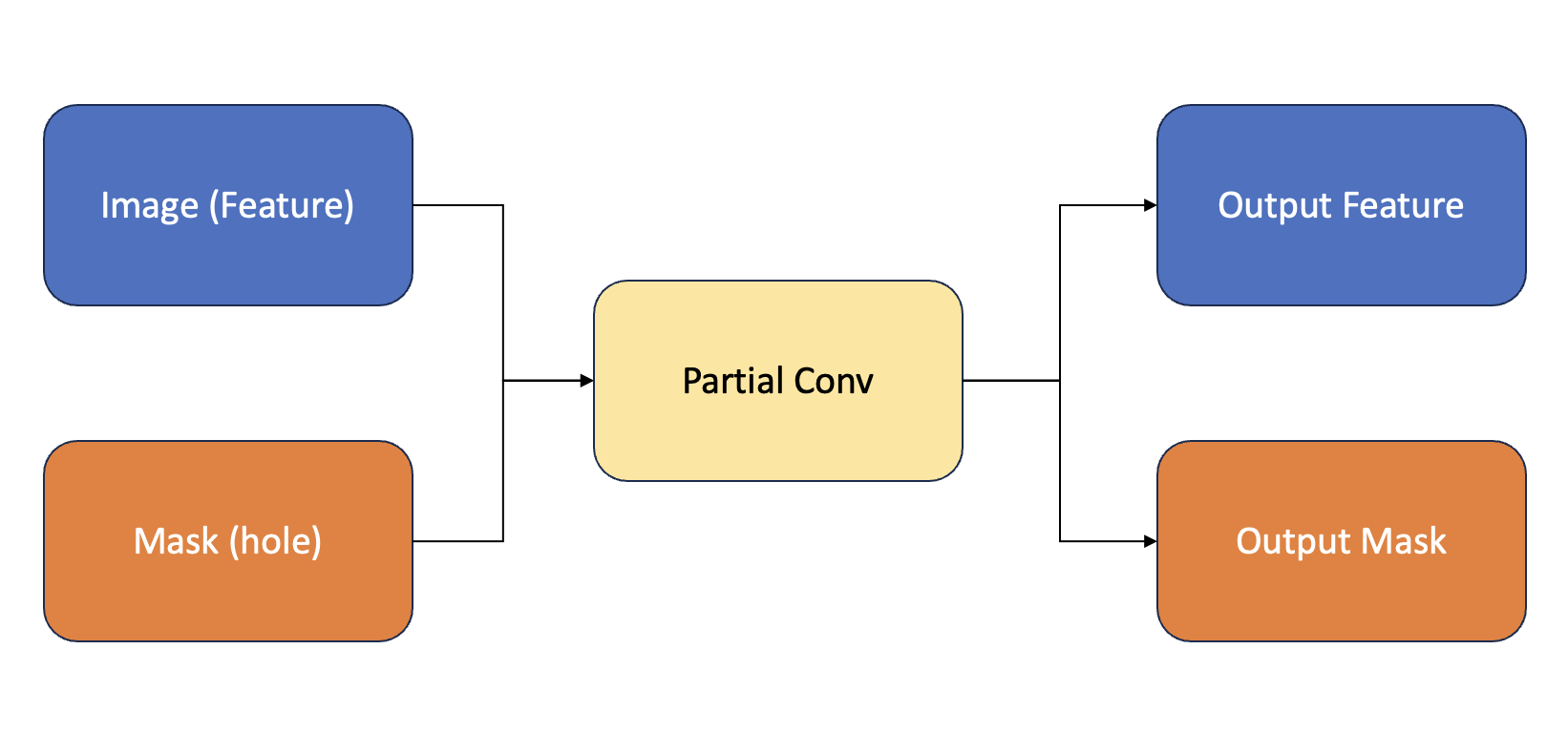
Partial Convolutional layer는 input으로 Image(feature)와 mask를 받아 feature(image)와 mask를 output으로 내보내는 연산이다.
식으로 살펴보자.
를 구하는 식이 Output feature ()의 요소를 구하는 식이고, 를 구하는 식이 Output Mask ()의 요소를 구하는 식이다.
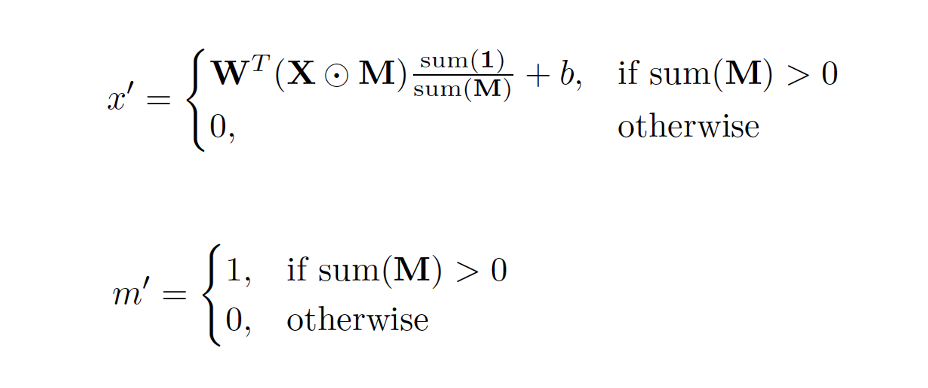
를 구하는 식을 먼저 살펴보자.
- 는 Conv filter의 weight와 bias 이다.
- 는 feature values 이다. (pixel values)
- 은 Mask이다. (hole: , non-hole: )
- 은 element wise multiplication 연산이다.
식을 살펴보면 는 Mask에서 non-hole인 부분이 한 군데라도 존재한다면 위에 있는 식을 연산한 결과값이고, non-hole인 부분이 한 군데라도 존재하지 않는다면 0의 값을 갖는다. 직관적으로 생각해본다면 Mask에서 non-hole인 부분들만 이용해서 Conv 연산을 통해 hole인 부분을 채워보겠다는 뜻으로 해석할 수 있다.
는 non-hole인 부분이 한 군데라도 있다면 이고, 모두 hole이라면 이다. 를 구하는 식에서 설명한 것처럼 Mask에서 non-hole인 부분들을 이용해 Conv 연산으로 hole인 부분을 채웠으므로 그 hole인 부분을 메워주겠다는 의미로 해석하면 된다.
즉, Partial Conv 연산을 반복적으로 진행한다면 아래와 같이 Mask의 hole 부분이 점점 채워지는 것을 볼 수 있다.
 그림 출처: https://github.com/MathiasGruber/PConv-Keras
그림 출처: https://github.com/MathiasGruber/PConv-Keras
2-2. Model architecture
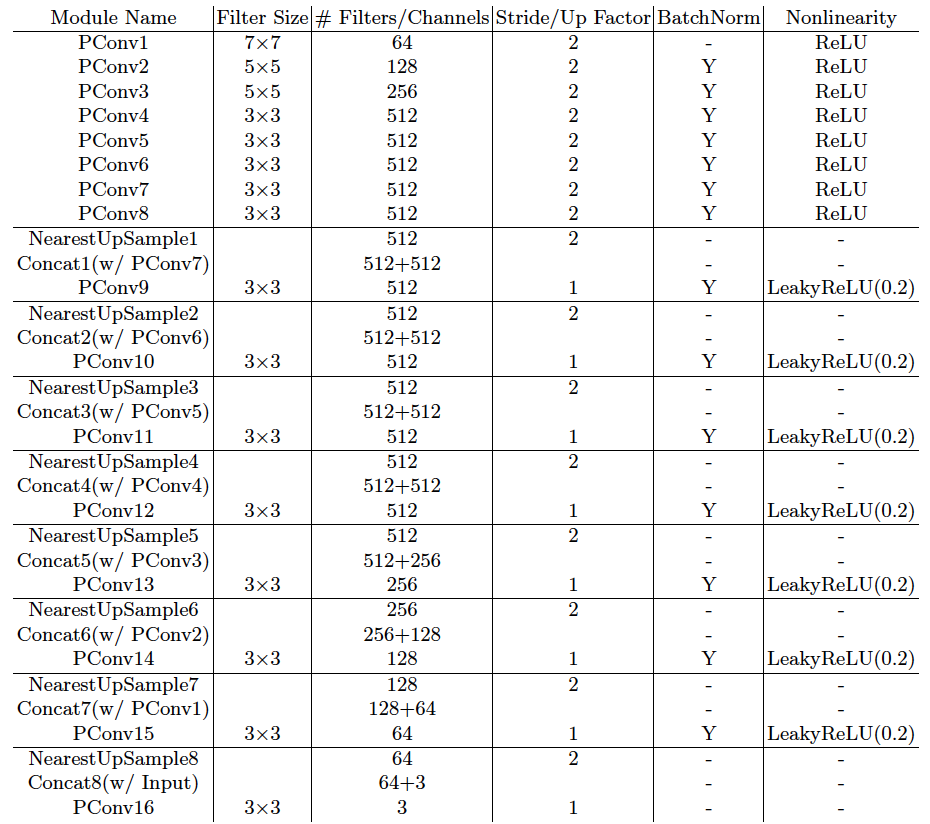 모델 구조는 위와 같다.(Table 2)
모델 구조는 위와 같다.(Table 2)
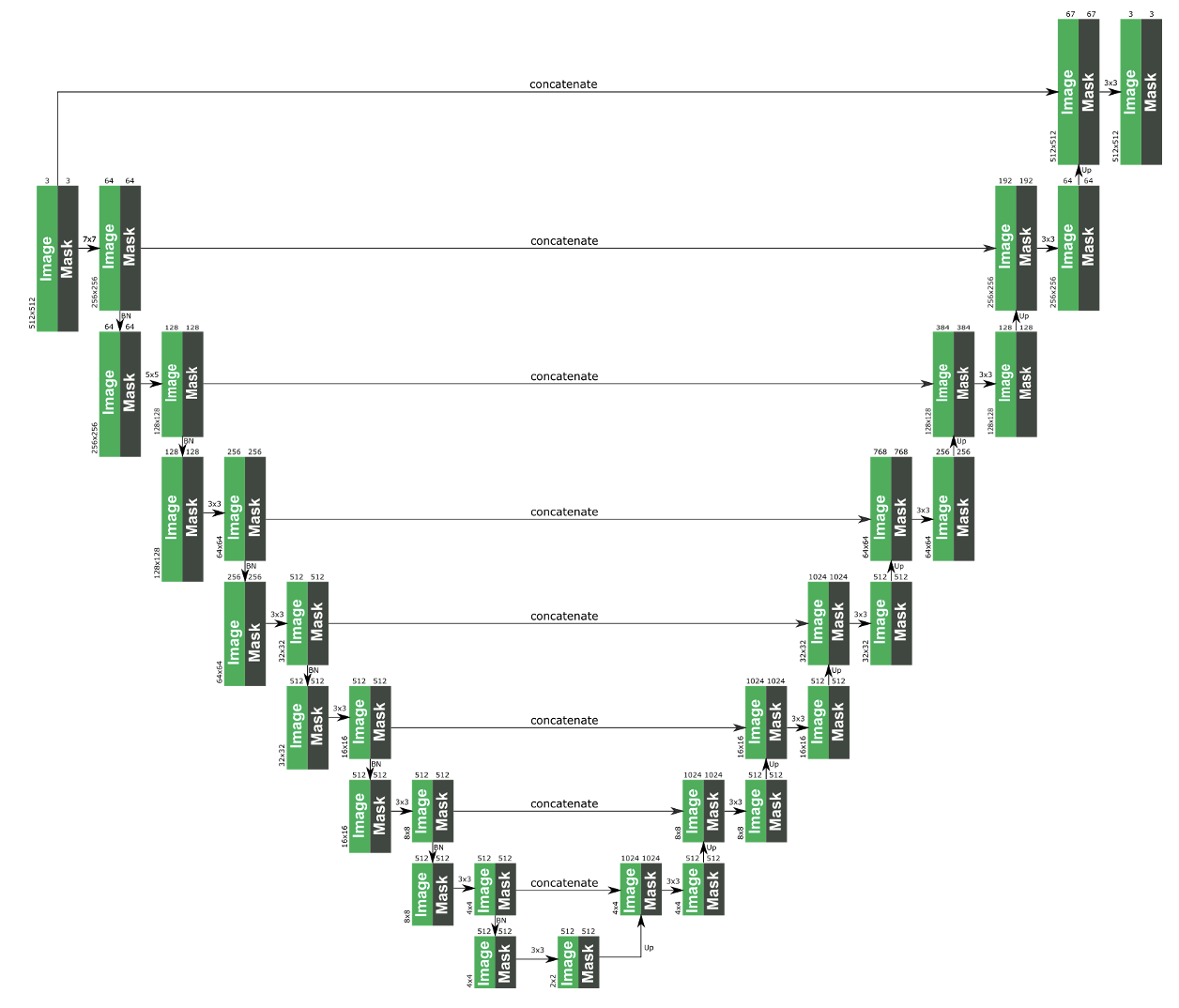 그림 출처: https://github.com/MathiasGruber/PConv-Keras
그림 출처: https://github.com/MathiasGruber/PConv-Keras
그림으로 나타낸 모델구조이다. 일반 Conv layer 대신 PConv layer로 구성된 U-Net 구조의 모델인 것을 확인할 수 있다.
2-3. Loss function
 Loss function은 위와 같다. 하나씩 살펴보자.
Loss function은 위와 같다. 하나씩 살펴보자.
첫 번째로 와 를 살펴보자.
-
M은 binary mask이다. (hole = , non-hole = )
-
은 모델이 예측한 이미지이고, 은 ground truth 이미지이다.
-
는 의 원소의 개수이다. ()
식을 살펴보면 는 non-hole인 부분의 loss인 것을 알 수 있고,
은 hole인 부분의 loss인 것을 알 수 있다.
두 번째로 를 살펴보자.
-
는 에서 non-hole인 부분을 의 픽셀로 치환한 이미지이다.
-
는 p 번째 selected layer의 activation map이다.
- ImageNet-pretrained VGG16을 이용했다.
- 이 loss를 구할 때는 pool1, pool2, pool3 layer만 이용했다.
-
는 의 원소의 개수이다.
첫 번재 항은 과 을 ImageNet-pretrained VGG16를 통과시켜 selected layer로 부터 얻은 각각의 activation map에 대한 loss들의 합이다. (두 번째 항도 대신 가 되었다는 것만 빼면 동일한 연산이다.) 이 두 항을 합한 것이 인데 연산을 보면 hole인 부분의 loss를 non-hole인 부분보다 2 배 더 중요하게 본다는 것을 알 수 있다. (는 와 non-hole인 부분은 같다.)
세 번째로 와 을 살펴보자.
먼저 gram matrix에 대해 알아야 한다. Gram matrix 설명링크
Style loss에서 style은 feature의 gram matrix로 구할 수 있다. (autocorrelation)
이 논문에서 Style loss는 모델의 output feature의 gram matrix와 ground truth의 gram matrix 간의 loss 이다.
한 번 식과 함게 살펴보자.
-
는 의 채널수이다.
-
는 로 normalization factor 이다.
식에서 가 의 gram matrix이다.
마찬가지로 는 의 gram matrix 이다.
이 두 gram matrix의 loss를 구할 수 있고, 이후 정규화를 해준다.
이 연산을 각 selected layer 마다 해서 더하면 를 구할 수 있다.
(연산은 식에서 대신 를 사용한다는 것 말고 차이점이 없으므로 생략하겠다.)
정리하자면 은 ()와 를 ImageNet-pretrained VGG16에 통과시켜 selected layer마다 나온 각각의 feature들()로 부터 얻은 각각의 gram matrix를 통해 구한 loss의 합과 같다.
직관적으로 이해하자면 feature map의 채널 간 내적 값 (상관관계) 정보가 담긴 각각의 Gram matrix로 loss를 구한다는 것은 두 feature map ()의 채널 간 상관관계를 높이는 방향으로 학습을 하도록 의도한 것으로 해석할 수 있다.
마지막으로 를 살펴보자.
- (TV loss)에서 는 total variation의 약자이다.
- Smoothing penalty on , 은 hole과 non-hole의 경계의 집합.
식을 살펴보면 에서 hole과 non-hole의 경계를 기준으로 1 픽셀의 차이를 둔 non-hole인 부분( or )과 hole 인 부분()의 loss 들의 합이다.
TV loss는 spatial smoothness를 위해 만들어졌다고 한다.
직관적으로 이해하자면 hole인 부분에 이미지를 채워넣을 때 hole인 부분과 non-hole인 부분의 경계가 부자연스러울 수도 있으니 이 점을 보완하기 위한 loss라고 해석할 수 있다.
결국, 은
위에서 구한 의 조합으로 만들어졌다.
(각 loss에 대한 가중치(계수)는 100 장의 valdiation image로 hyper parameters 조합을 통해 발견했다.)
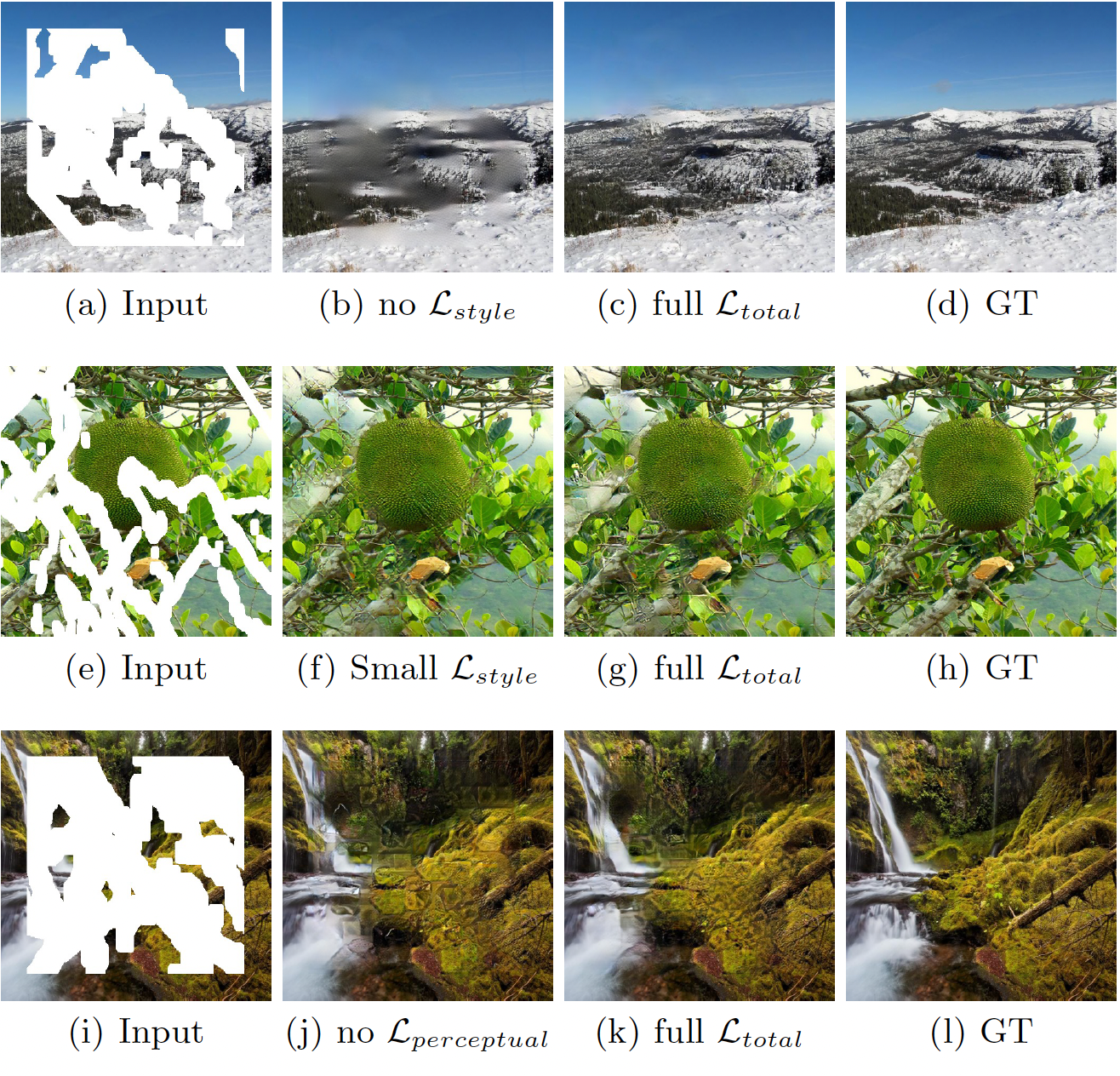
Figure 3는 Loss별 가중치를 조정해 실험한 결과이다.
(b)와 (f)는 이 없을 때나 작을 때 어떤 결과를 나타내는지 보여준다. 흐릿해지거나(b), fish scale (f)이 나타났다. (j)는 을 제거했을 때의 결과이다. grid-shaped artifact가 나타난 것을 볼 수 있다.
3. Experiments
3-1. Irregular Mask Dataset
-
학습을 위해 55,116 개의 mask를 테스트를 위해 24,866 개의 mask를 생성하였음. (mask size는 512 x 512로 고정)
-
여러 기법 (random dilation, rotation, cropping)으로 마스크를 증강.
-
Test set으로 사용될 Mask dataset을 border에 hole의 유무로 세분화하였음.
(외곽 쪽에 hole이 있는 경우, hole을 점점 채워나가는 방식의 Partial Conv의 경우 잘 동작하지 않을 수도 있어 결과를 보고자 이렇게 나눈 것 같음.)
 위 그림에서 1, 3, 5 번 mask는 border가 non-hole인 mask
위 그림에서 1, 3, 5 번 mask는 border가 non-hole인 mask
2, 4, 6 번 mask는 border에 hole이 포함된 mask -
Image에서 hole이 차지하는 비율로도 카테고리화 하였음. (6 가지)
(0.01, 0.1], (0.1, 0.2], (0.2, 0.3], (0.3, 0.4], (0.4, 0.5, (0.5, 0.6]
각 카테고리당 1000 개의 mask를 포함했으며, border 부분에 hole 유무까지 세부 카테고리화 하였음. 장
3-2. Training Process
-
Training Data
ImageNet, Place2, CelebA-HQ 데이터 셋을 사용
ImageNet, Place2 데이터 셋으로는 train, val, test 셋으로 나누어 사용하였고, CelebA-HQ 데이터는 27K를 training에, 3K를 test 할 때 사용하였음. -
Training Procedure
- Weight initialization: He initialization
- Optimizer: Adam
- GPU: single NVIDIA V100 GPU (16 GB)
- Batch size: 6
-
Initial Training and Fine-Tuning
초기 학습에서 hole의 존재가 Encoder 부분에서 BatchNorm이 문제가 되었음. Hole pixel value ()를 포함해서 mean과 variance를 계산하는 것은 뭔가 이상함. hole의 크기에 따라서 BatchNorm에 영향을 줌.이 문제는 Encoder 부분에서 문제가 되지. Decoder 부분에서는 이미 hole이 거의 다 메워져 있기 때문에 문제가 되지 않음.
이러한 문제를 해결하기 위해 논문에서는 learning rate 0.0002 로 먼저 학습하고 (initial training), 이후 fine-tuning 할 때는 encoder 파트의 BatchNorm layer를 freeze 해놓은 상태에서 learning rate 0.00005로 학습하였음. (fine-tuning)
3-3. Comparisons
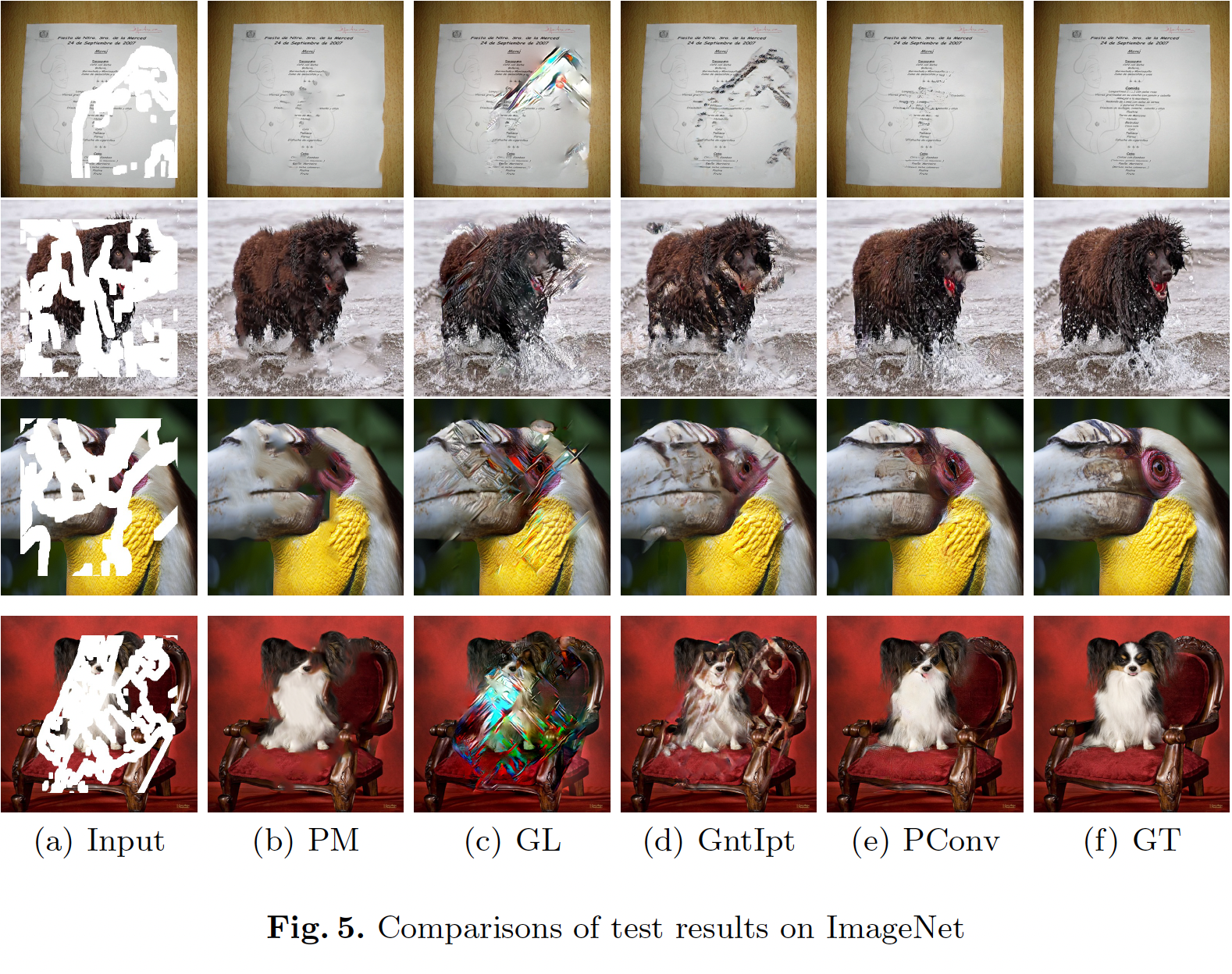
Figure 5를 보면 다른 여러 기법들 보다 Pconv를 이용한 Unet의 결과가 더 좋은 것을 볼 수 있다. (Place2 결과 (Fig 6), CelebA-HQ 결과 (Fig 8)도 마찬가지이다. 그림 생략)
정량적인 평가
먼저 사용된 평가지표들에 대해 살펴보자.
- : loss (MAE)
- PSNR (Peak Signal to Noise Ratio)
화질 손실량을 계산하기 위해 사용 (두 이미지의 픽셀값이 비슷한 지)
PSNR =
R은 픽셀의 최대값을 의미한다. MSE 식은 아래와 같다.
MSE =
우리는 과 에 각각 모델이 예측한 이미지, Ground truth를 대입할 것이기 때문에 예측한 이미지가 ground truth와 픽셀값이 비슷할 수록 MSE 값이 낮게 나올 것이기 때문에 PSNR 값은 커진다.
한 마디로 PSNR가 높을수록 모델이 예측한 이미지와 Ground truth 이미지가 비슷한 픽셀값을 가진다는 것을 의미한다.
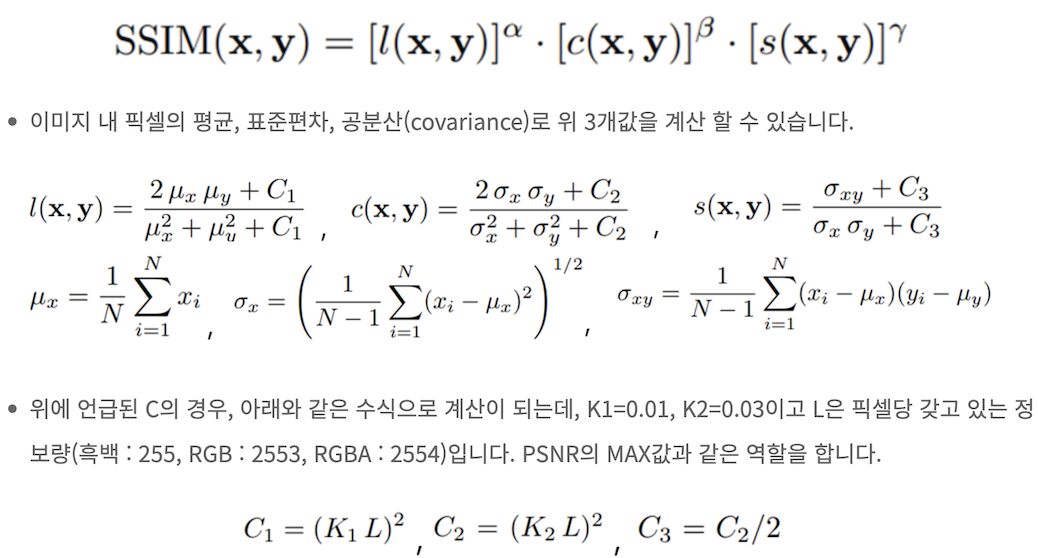
- SSIM (Structural Similarity Index Measure)
PSNR과 비슷한 평가지표이지만, 직접적으로 두 이미지 간의 픽셀값을 비교한다기 보다는 휘도(Luminance), 대비(Constrast), 구조(Structure) 이렇게 총 3 가지 측면에서 평가함. PSNR과 마찬가지로 값이 높을수록 좋은 성능이다.
식은 아래와 같다.
각 method별 정량 평가표는 아래와 같다. 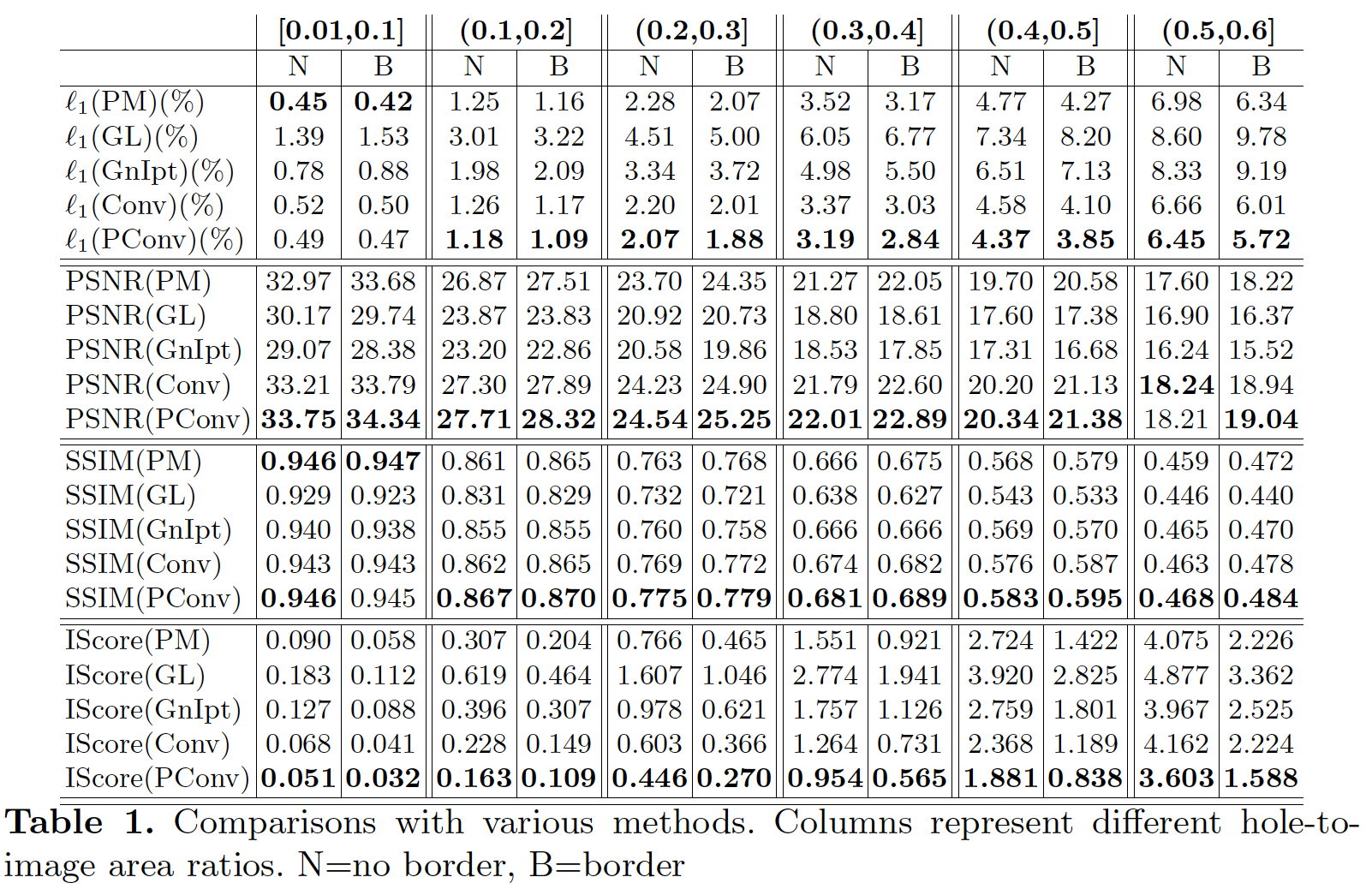 다른 여러 기법들 보다 PConv based UNet 모델의 결과가 더 좋은 것을 볼 수 있다.
다른 여러 기법들 보다 PConv based UNet 모델의 결과가 더 좋은 것을 볼 수 있다.
Discussion
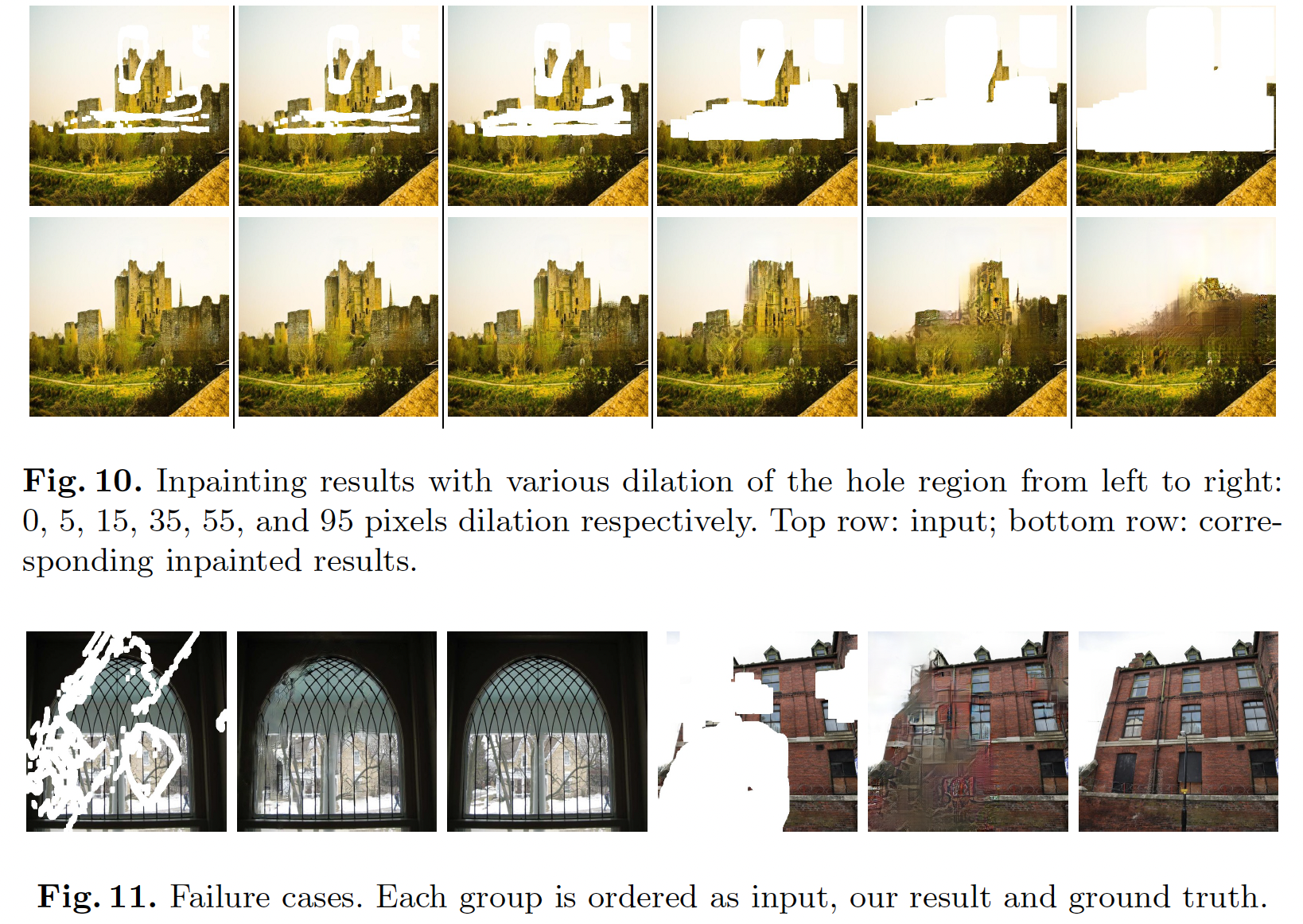
- Hole이 크면 구조물에 대해 잘 복원하지 못한다. (Fig 10)
- 철근이나 문 같은 세부적인 물체들에 대해서는 잘 표현하지 못 한다. (Fig 11)
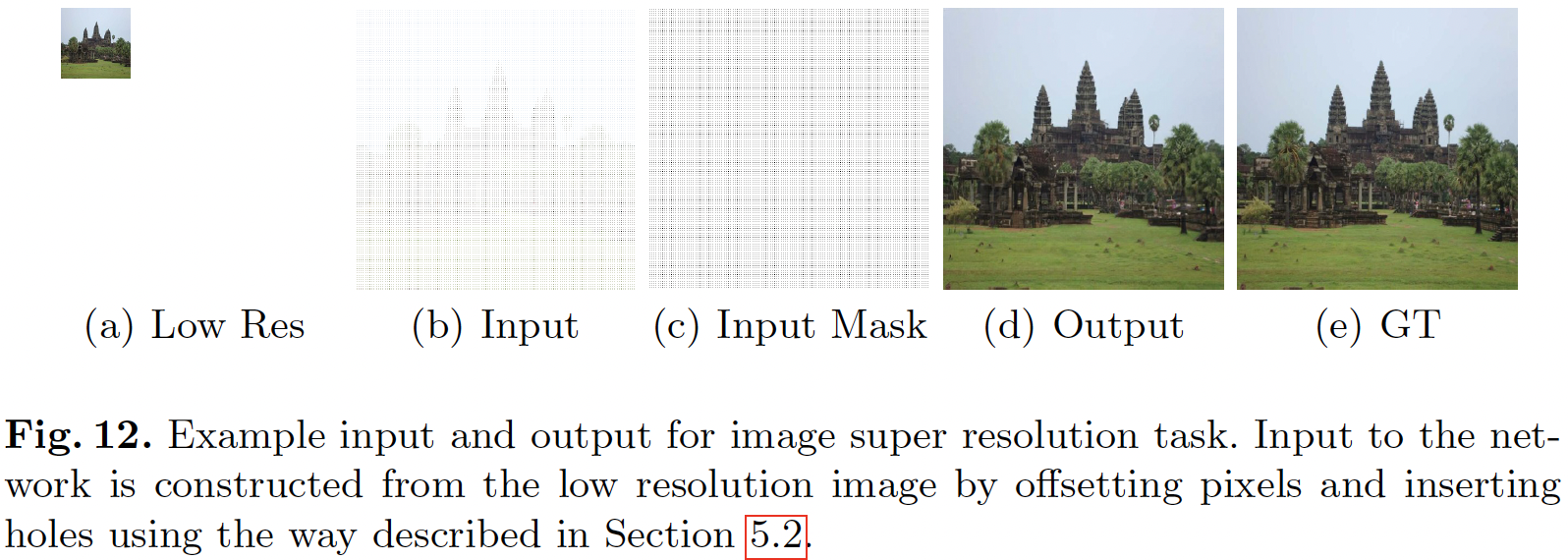
Extension to Image Super Resolution
-
해상도가 낮은 이미지를 높이는 분야인 super resolution task에서 PConv based-UNet 모델을 사용한 결과 예시이다.
- (a): 해상도가 낮은 이미지
- (b): 해상도가 낮은 이미지를 늘린 이미지이다. 늘리면서 hole이 일정한 격자 간격으로 생긴 것을 볼 수 있다.
- (c): 이미지 (b)의 mask이다.
- (d): 모델이 예측한 이미지
- (e): Ground Truth

- 다른 여러 Super resolution 관련 method와 비교해본 결과이다.
Reference
Paper
https://arxiv.org/abs/1804.07723