1: Definition
Metric Space (X,d)위의 한 점 x와 양의 실수 r>0에 대해, open ball을 다음과 같이 정의한다.
Br(x):={y∈X∣d(x,y)<r}
점 x을 중심으로 반지름이 r인 모든 점들의 집합을 의미한다. d(x,y)<r이기 때문에 경계는 포함하지 않는다.
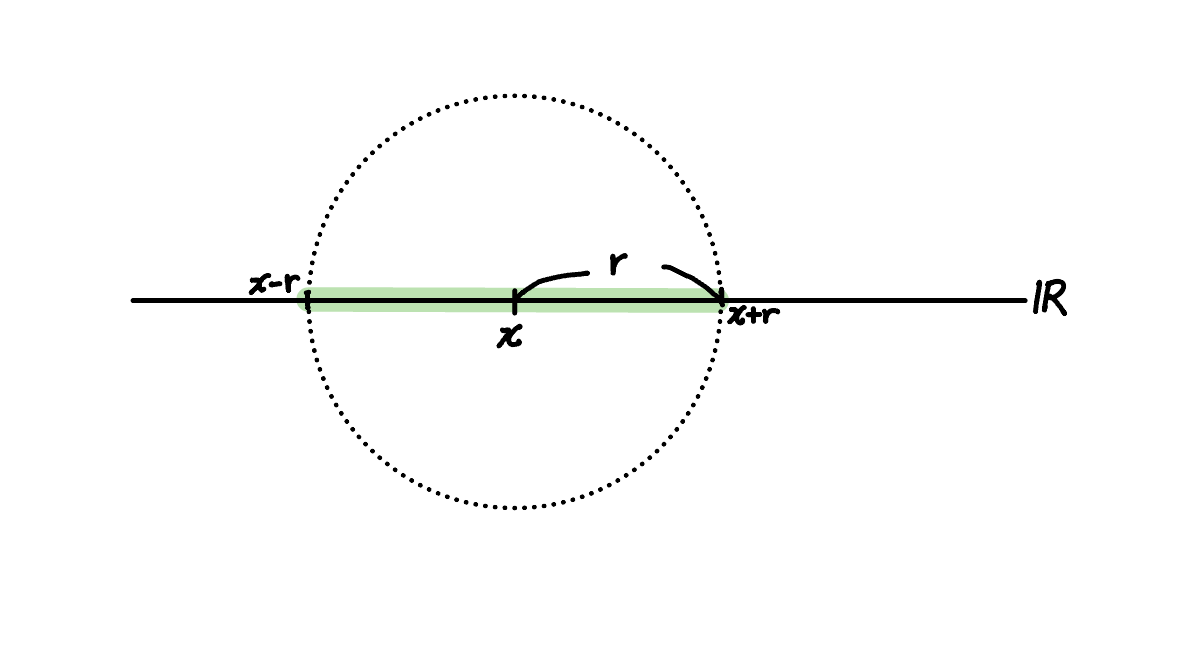
1.1: Example (R에서의 open ball)
R에서는 모든 p>0에 대해 dp(x,y)=∣x−y∣이다.
이때 Br(x)=(x−r,x+r)이다.
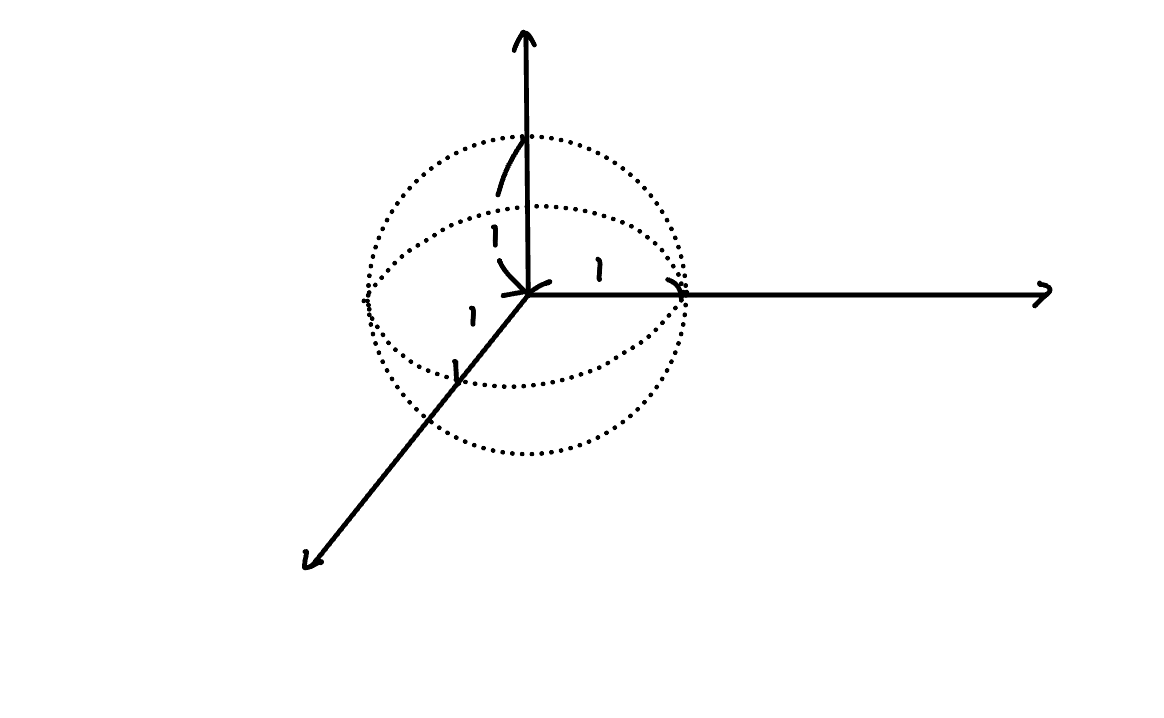
1.2: Example (R3에서의 open ball)
R3에서, 유클리드 거리(L2)로 정의되는 open ball은 일반적인 구의 형태와 동일하다.
다음은 원점(0,0,0)을 기준으로 반지름이 1인 open unit ball이다.
B1((0,0,0))={(x1,x2,x3)∈R3∣x12+x22+c33<1}
open ball의 내부는 '경계를 제외하고' 전부 채워져있다는 사실을 인지해야한다
1.3: Example (R2에서의 open ball)
R2 에서, 맨하탄거리(L1)로 정의된 open ball은 rhombus(마름모)모양이다.
B1((0,0))={(x1,x2)∈R2∣∣x1∣+∣x2∣<1}
R2 에서, 유클리드거리(L2)로 정의된 open ball은 다음과 같다.
B1((0,0))={(x1,x2)∈R2∣d2((0,0),(x1,x2))<1}
R2 에서, d∞(x,y)(supremum metric)로 정의된 open ball은 정사각형 모양이다.
B1((0,0))={(x1,x2)∈R2∣∣x1∣<1,∣x2∣<1}
1.4: Example (Discrete metric과 open ball)
먼저 Discrete metric에 대한 정의를 다시 상기하자.
Discrete metric에서 open ball은 두가지 경우로 나눌 수 있다.
{0,10r>1r≤1
- radius가 1보다 크면 open ball의 정의(1:Definition)에 따라 0 또는 1로 결정된다.
open ball의 정의:
Br(x):={y∈X∣d(x,y)<r}
여기서 d(x,y)는 Discrete metric에 따라 x=y이면 d(x,y)=0이고, x=y이면 d(x,y)=1이다.
따라서 전체 집합X에 있는 모든 점에 대해서 중심이 x인 d(x,y)는 1과 0말곤 나올 수 없다. (Br(x)에 포함될 수 있는 조건 d(x,y)<r를 y∈X인 모든 점이 만족한다.)
따라서 Br(x)=X이다.
2. radius가 1보다 작거나 같으면, open ball의 정의에서 문제가 생긴다.
d(x,t)<r을 만족하는 전체 집합 X에 있는 점은 open ball의 중심인 x 자기 자신 밖에 존재하지 않는다.
따라서 Br(x)={x}이다.
임의의 집합 X에서 다음과 같이 정의된 discrete metric도 거리의 정의를 만족한다.
d(x,y)={01x=yx=y
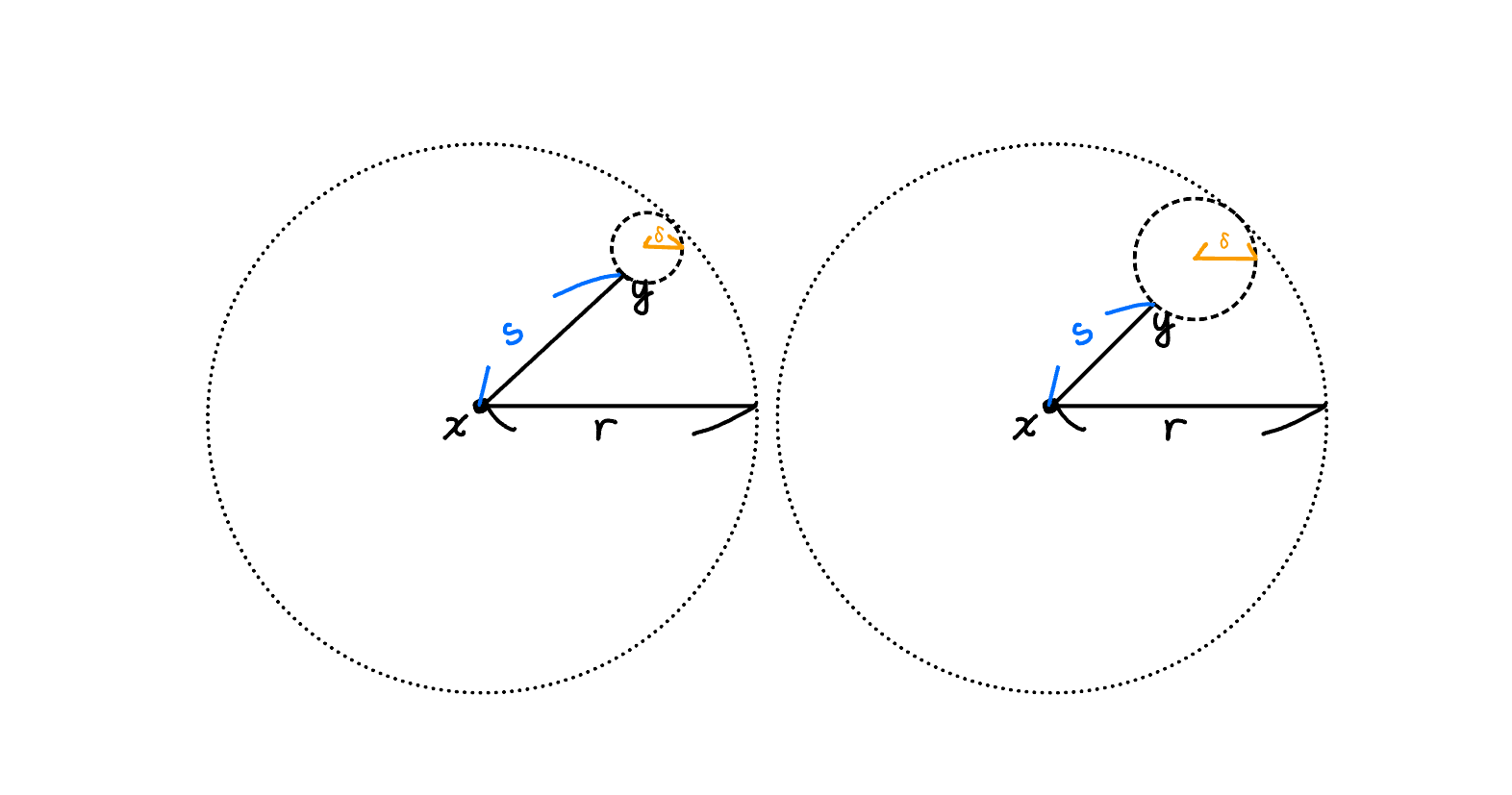
2: Definition
Metric space(X,d)안의 임의의 open ball Br(x)에서 임의의 원소 y∈Br(x)에 대해, 다음을 만족하는 δ>0가 존재한다.
Bδ(y)⊂Br(x)
2: Proof
s=d(x,y)라고 하자. 이 값은 무조건 r보다 작다.(∵Br(x)는 open ball)
δ>0를 다음과 같이 만들 수 있다.
δ=2r−s>0
이렇게만 δ를 규정해야하는 것은 아니지만, δ가 위와 같이 정의되어 있을때가 가장 보편성을 띈다. 그 이유는 다음 과정에서 설명된다.
이렇게 규정할 수 있는 이유는 아래 그림을 통해서 알 수 있다.
Bδ(y)⊂Br(x)를 증명하는 가장 보편적인 방법은 open ball Bδ(y)에 포함된 임의의 원소z가 Br(x)에 들어간다를 보이는 것이다.
z∈Bδ(y)⊂Br(x)를 보이기 위해 triangle inequality를 사용한다.
d(z,x)≤d(z,y)+d(y,x)<δ+s=2r+s<r
d(z,x)<r이라는 사실은 z∈Br(x)라는 사실을 보여준다.
2.1: Example (R2에서 openball 안의 open ball)
앞서 살펴본 open ball in an open ball은 유클리드 거리(L2)를 바탕으로 정의한 것이다.
유클리드 거리가 아닌 다른 거리(d1, d∞)에서도 정의할 수 있다.
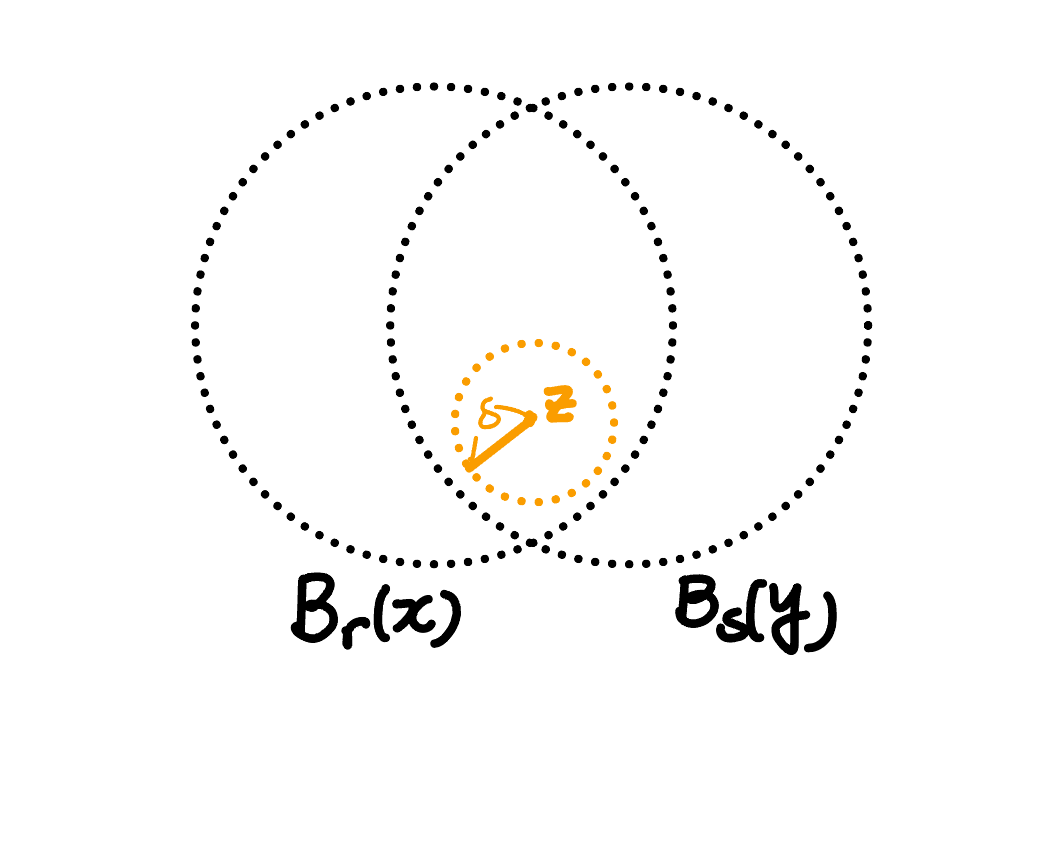
2.2: Corollary
Metric space (X,d) 안의 두 open ball Br(x), Bs(y)가 있을 때,z∈Br(x),Bs(y)인 z가 존재한다고 하자.
그러면, 다음 조건을 만족하는 δ>0를 찾을 수 있다.
Bδ(z)⊂Br(x)∩Bs(y)
위 상황은 아래와 같은 그림으로 표현할 수 있다.
2.2: Proof
두개의 open ball을 분리해서 접근하는 것이 좋다.
2: Definition에 따르면 Bδ1(z)⊂Br(x)인 Bδ1(z)를 정의할 수 있다.
2: Definition에 따르면 Bδ2(z)⊂Bs(y)인 Bδ2(z)를 정의할 수 있다.
여기서 핵심이 되는 아이디어는 δ를 min(δ1,δ2)으로 생각하는 것이다.
위 세문장을 전부 합쳐서 보면
Bδ(z)⊂Bδ1(z)⊂Br(x)Bδ(z)⊂Bδ2(z)⊂Bs(y)
를 만족한다. 따라서 Bδ(z)⊂Br(x)∩Bs(y)이다.
3: Definition
Metric Space (X,d)위의 한 점 x와 양의 실수 r>0에 대해, closed ball을 다음과 같이 정의한다.
Br(x):={y∈X∣d(x,y)≤r}
4: Definition
앞서 살펴본 open ball과 closed ball을 En으로 확장할 수 있다.
En에서의 open n-ball은
Brn(x):={y∈En∣d(x,y)<r}
En에서의 closed n-ball은
Bˉrn(x):={y∈En∣d(x,y)≤r}
이다.
5: Definition
(n−1)-sphere는 다음과 같이 정의한다.
Bˉrn(x)−Brn(x)=Srn−1(x)
즉, Srn−1(x)는 {y∈En∣d(x,y)=r}이라는 뜻이다.
여기서 핵심은 ball은 n-dimension이고, sphere는 n−1-dimension이라는 사실이다.
Reference
D. W. Kahn, Topology: An Introduction to the Point-set and Algebraic Areas. Dover Books on Mathematics, 1995, p22-23
이종규, 위상수학. 북스힐, 2020, p152-155