좌표계(Coordinate System)
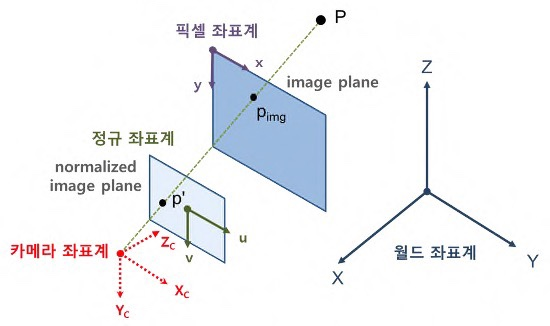
Image Geometry에서는 위의 4가지 좌표계로 정의되어 있으며 각각의 좌표계가 무엇을 의미하는지 매우 중요합니다.
World/Camera Coordinate System은 3차원 Coordinate이고 Normalized / Image(Pixel) Coordinate System은 2차원 Coordinate을 알 수 있습니다.
World Coordinate System
어떠한 object의 위치를 정의할 때 기준으로 사용되는 좌표계이며, 고정되어 있는 좌표계가 아닌 주어진 문제에 따라 임의로 지정하여 사용할 수 있습니다.
또한 좌표계에서의 단위도 지정되어 있는 것이 아닌, 사용자가 직접 단위를 정하는 것으로 m, cm 등 다양한 단위를 사용하게 됩니다.
좌표를 나타내는 방식은 P = (X, Y, Z)로 맨 위 상단의 그래프를 보시면 쉽게 이해가 될 것 입니다.
Camera Coordinate System
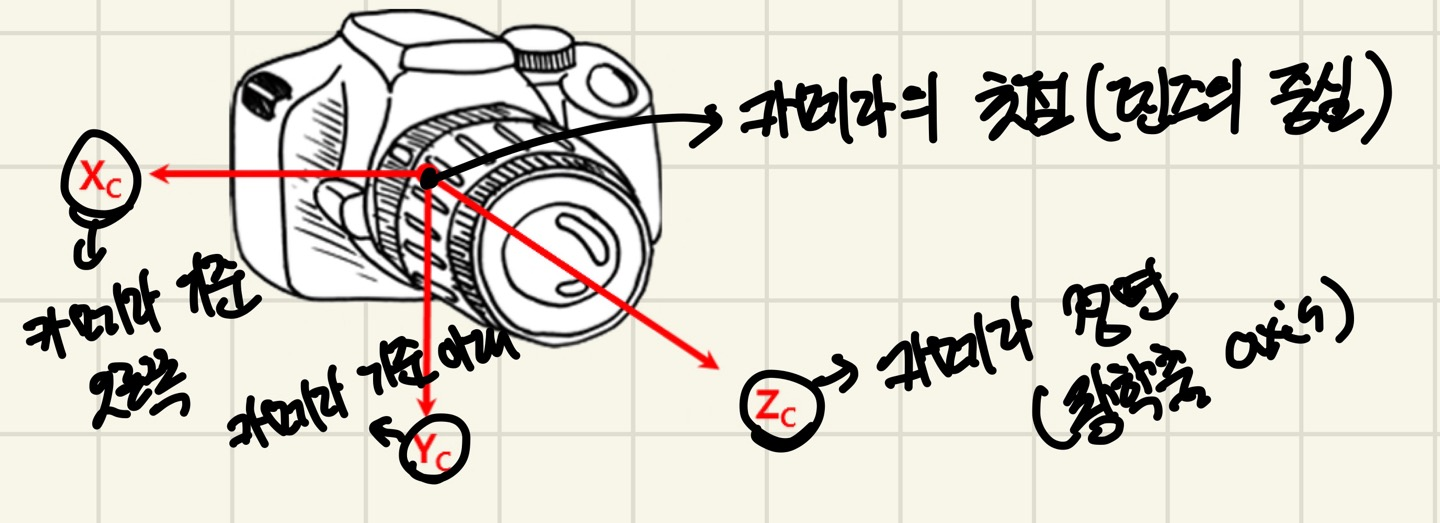
위의 이미지를 보시면 아시겠지만, 카메라를 기준으로 하는 좌표계로 설정되어 있음을 확인할 수 있습니다.
좌표계의 각각의 축을 보시게 되면 아랫첨자 c(camera)가 있는데 이는 World Coordinate System의 좌표축과 비교하기 위해서 쓴 것 입니다.
단위는 World Coordinate System에서 사용하는 단위와 똑같아야하며, World Coordinate System이 사용하는 단위에 종속적입니다.
좌표를 나타내는 방식은 로 나타냅니다.
Image Coordinate System
맨 위 상단의 그래프에서 픽셀 좌표계(Pixel Coordinate System)가 영상 좌표계이며, "영상 좌표계"라고 불리우는 것이 더 일반적이라고 한다.
카메라 좌표계는 우리의 눈이라고 생각하면 쉽고, 우리의 눈이 어떠한 이미지를 보았을때의 사물을 표현하는 좌표계가 영상 좌표계라고 생각하면 쉽다.(우리의 눈으로 사물을 보면 2D로 보이기 때문에 영상 좌표계가 2D로 되어 있는 것이라고 생각하면 편한다.)
이때 용어 1가지가 등장하는데, 우리가 보는 공간을 "Image Plain" 이라고 한다. 이 Image Plain에는 다양한 object들이 있다.
이해하기 쉽게, 우리가 눈으로 바라보는 모든 배경을 Image Plain으로 보고 그 모든 배경안에서 object들이 Image Plain안에서 표현된다고 생각하면 쉽다.
Image Plain안에서 사용하는 단위는 로 나타낸다.
기하학적으로 설명하자면, 월드 좌표계는 카메라 좌표계를 지나서 Image Plain의 한 점(pixel)로 Projection이 된다고 보면 된다.
하지만 월드 좌표계에서 영상 좌표계로 표현하는 것은 가능하지만, 영상 좌표계에서 월드 좌표계로 표현하려면 부가적인 정보 없이는 불가능하다는 것을 알야한다. 이는 영상좌표계에서 z를 표현할 부가적인 정보가 필요하다는 것을 말한다.
Normalized Image Coordinate System
정규 좌표계는 카메라의 Intrinsic Parameter(내부 파라미터)의 영향을 제거한 이미지 좌표계로 단위가 없으며, 카메라와의 초점거리가 1로 설정되어 있다.
영상 좌표계는 upper-left가 원점인 것과는 달리, 정규 좌표계는 카메라 좌표축인 와의 교점이 원점이다.
좌표를 나타내는 방식은 P' = (u, v)로 표현한다.
