Multi-task Learning 고찰

ref.
간단하게 정의하자면 여러가지 Task를 한번에 처리
Ex) 자율주행 자동차의 카메라 -> 신호등, 사람, 차량 등 여러가지 Object를 한꺼번에 detection하는 Task
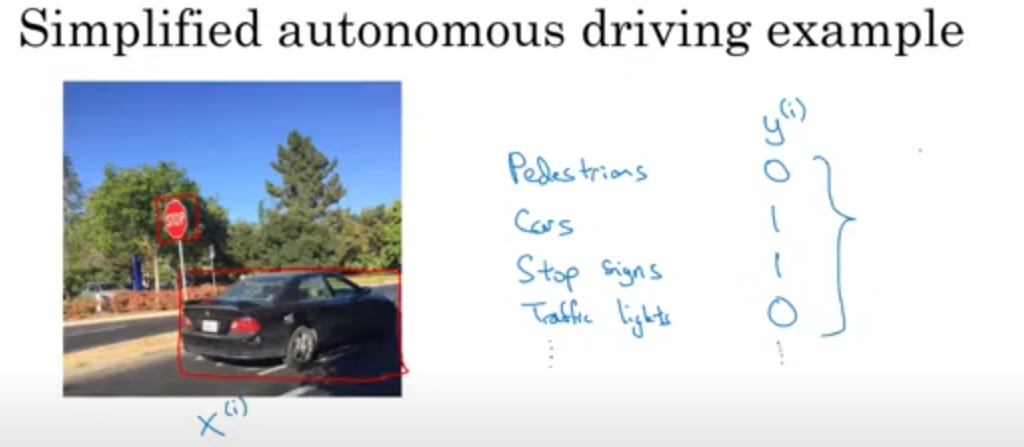
의 shape → (4,. 1)
따라서 label 데이터 의 전체 shape = (4, m)
만약에 표지판만을 detection하는 single Task 문제였다면 shape → (1, m)
분리된 4개의 신경망을 train하는것이 좋을까? → No
low feature들을 공유하기 때문에 1개의 신경망을 사용하는것이 조금 더 효율이 좋을것,
각 작업이 가지는 데이터 양이 비슷해야 한다.
충분히 큰 신경망을 가져야 한다.
장점:
- Knowledge Transfer:
- Overfitting 감소
- Computational Efficiency
- 중요도가 높음
단점:
- 다른 task에 악영향을 미치는 Y가 존재할 수 있음
- Task 마다 학습 난이도가 크게 차이나면 수렴하지 않거나 robust하지 않음
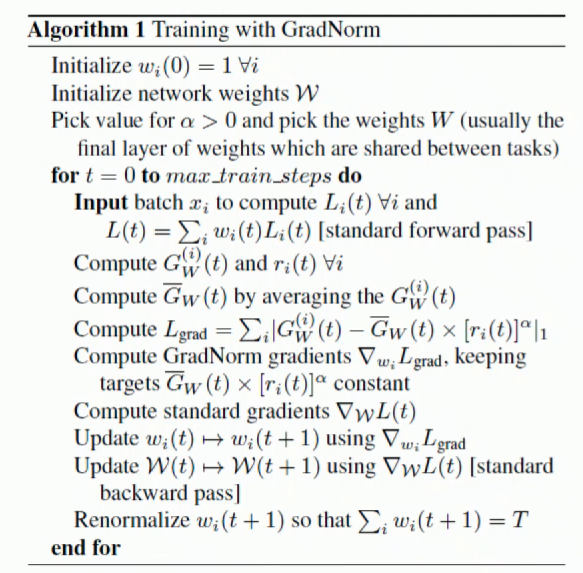
GradNorm
3가지 태스크에서 발생한 loss로 부터 구한 Gradient의 scale이 서로 비슷해지게 한다.
여러 Task의 오버피팅 지점이 다르다. → 지점을 비슷하게 맞춰주는 개념
로스의 사이즈 L-2 norm 취해서 사이즈 구함
L-2 norm들에 대한 평균을 낸다. L-2 norm 평균과 L2 norm들의 값이 비슷해지게 (L-1 norm)
이것을 L_grad Loss 이것을 미분해서 학습한다.
결론은 L_grad를 구하는것이 핵심
- weight initial
- batch 에 대해 Loss를 구한다
- Gradient와 r(?)을 구한다
- Gradient의 평균을 구함으로 \bar G를 구한다.
- Gradient와 \bar G의 L1 loss / r은 \bar G에 곱해지는 weight?
- 방금 구한 L1 loss에 대해 gradient를 구한다.
- standard L1 loss gradient 구한다.
- w를 L1 gradient로 업데이트
- W를 standard L1 gradient로 업데이트
- 업데이트된 weight를 renormalize
👏안녕하십니까! 개발자, 데이터 분석가, AI 리서쳐를 꿈꾸는 이경봉 입니다. 항상 발전하며, 팀원들, 고객들과 끊임없이 소통하는 말 많은 개발자가 되는 것이 목표입니다!